A los robots se les ha enseñado cómo caer de manera segura mediante el estudio de las caídas de gatos
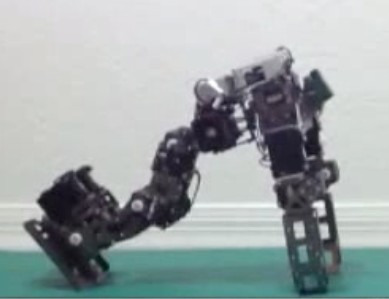 Nadie está a salvo de una caída inesperada. Siempre existe el riesgo de tropezar y volar al piso sin éxito. Esto puede suceder no solo con una persona, sino también con un robot .Investigadores del Instituto de Tecnología de Georgia han desarrollado un algoritmo que asegura que el robot se bloquee con el menor daño. Este es un trabajo bastante importante, porque el costo de los robots a veces asciende a decenas de miles de dólares, y debido a un accidente puede sufrir serias pérdidas. Además, los robots de tipo humanoide trabajan cada vez más cerca de los humanos, incluidas las personas mayores y los niños. Si cae de una manera no óptima, puede lastimar a una persona.El algoritmo proporciona una estrategia óptima en respuesta a una amplia variedad de caídas, incluida una caída de un golpe débil o de un golpe fuerte, cuando el robot tiene que realizar una serie de saltos mortales. En cualquier caso, el robot minimiza el daño. El algoritmo pasó la prueba en un experimento real con el robot humanoide BioloidGP (ver video)."Creemos que los robots pueden aprender a caerse con seguridad", dice Sehoon Ha, coautor del artículo. “Nuestro trabajo reúne la investigación existente sobre la enseñanza de robots para caer, proporcionando una herramienta para determinar automáticamente el número total de contactos, el orden de los contactos, la posición y el tiempo de estos contactos. Todo esto afecta las consecuencias de la caída y cambia la respuesta del robot ".El trabajo científico se basa en un estudio previo del profesor Karen Liu, donde estudió la física de la transformación del cuerpo de un gato durante una caída .De ese trabajo, se sabía que el factor clave es el ángulo de aterrizaje. Los robots están equipados con computadoras a bordo, pero inicialmente no están adaptados para resolver el problema del aterrizaje seguro, por lo que no saben qué hacer cuando se caen. Gracias al nuevo algoritmo, aparecerá un programa en la computadora para calcular la secuencia necesaria de acciones, dependiendo de la velocidad y la dirección de la caída. Hay suficiente potencia informática para realizar cálculos sobre la marcha.El artículo científico, "Planificación de contacto múltiple para minimizar el daño de las caídas humanoides" ( pdf ), se presentó en octubre en la conferencia internacional Intelligent Robots and Systems en Hamburgo.
Nadie está a salvo de una caída inesperada. Siempre existe el riesgo de tropezar y volar al piso sin éxito. Esto puede suceder no solo con una persona, sino también con un robot .Investigadores del Instituto de Tecnología de Georgia han desarrollado un algoritmo que asegura que el robot se bloquee con el menor daño. Este es un trabajo bastante importante, porque el costo de los robots a veces asciende a decenas de miles de dólares, y debido a un accidente puede sufrir serias pérdidas. Además, los robots de tipo humanoide trabajan cada vez más cerca de los humanos, incluidas las personas mayores y los niños. Si cae de una manera no óptima, puede lastimar a una persona.El algoritmo proporciona una estrategia óptima en respuesta a una amplia variedad de caídas, incluida una caída de un golpe débil o de un golpe fuerte, cuando el robot tiene que realizar una serie de saltos mortales. En cualquier caso, el robot minimiza el daño. El algoritmo pasó la prueba en un experimento real con el robot humanoide BioloidGP (ver video)."Creemos que los robots pueden aprender a caerse con seguridad", dice Sehoon Ha, coautor del artículo. “Nuestro trabajo reúne la investigación existente sobre la enseñanza de robots para caer, proporcionando una herramienta para determinar automáticamente el número total de contactos, el orden de los contactos, la posición y el tiempo de estos contactos. Todo esto afecta las consecuencias de la caída y cambia la respuesta del robot ".El trabajo científico se basa en un estudio previo del profesor Karen Liu, donde estudió la física de la transformación del cuerpo de un gato durante una caída .De ese trabajo, se sabía que el factor clave es el ángulo de aterrizaje. Los robots están equipados con computadoras a bordo, pero inicialmente no están adaptados para resolver el problema del aterrizaje seguro, por lo que no saben qué hacer cuando se caen. Gracias al nuevo algoritmo, aparecerá un programa en la computadora para calcular la secuencia necesaria de acciones, dependiendo de la velocidad y la dirección de la caída. Hay suficiente potencia informática para realizar cálculos sobre la marcha.El artículo científico, "Planificación de contacto múltiple para minimizar el daño de las caídas humanoides" ( pdf ), se presentó en octubre en la conferencia internacional Intelligent Robots and Systems en Hamburgo.Source: https://habr.com/ru/post/es385377/
All Articles