Prueba de aspiradoras robóticas
 Los robots que saben acumular polvo en locales residenciales han ingresado al mercado ruso relativamente recientemente, pero ya han logrado evolucionar y, sin exagerar, se han convertido en los robots domésticos más comunes en nuestro país y en todo el mundo. Sin embargo, desde el momento de su aparición (2009) hasta el momento presente (2015), las disputas sobre sus beneficios y la justificación de tal adquisición no han disminuido en la sociedad. Después de todo, el dispositivo como era, y sigue siendo bastante caro, su costo, a veces supera el precio de una aspiradora potente clásica para la limpieza manual en 3-4 veces. Esto no se puede decir sobre el poder y la posibilidad fundamental de recolectar contaminantes del piso, ya que el robot es móvil y funciona con baterías, que en el nivel actual de desarrollo tecnológico no pueden almacenar energía en una escala de "kilovatios", accesible desde la salida para aspiradoras convencionales.Por lo tanto, especialmente a menudo en Internet, foros y solo en tiendas, surgen preguntas:Diremos de inmediato que inicialmente solo se planeó una descripción general del prometedor modelo TORNADO del fabricante francés e.ziclean, en cuyo ejemplo se suponía que realizaría una evaluación fundamental de las capacidades de las aspiradoras robóticas para la limpieza. Pero en el proceso de prueba hubo un interés incontrolable, si no entusiasmo, en verificar en el caso cualquier otro dispositivo de esta categoría para formar una impresión más holística de las capacidades de los robots. Un grupo de fanáticos formados alrededor de fabricantes individuales, listos para discutir las 24 horas sobre las ventajas de un modelo y las desventajas de otro, también hablan a favor de esto. Como resultado, se agregaron dos participantes más en la prueba: el muy popular Iclebo Arte en Rusia y la serie V Clever & Clean, que accidentalmente terminaron a nuestra disposición.Basado en las características de estos robots, resultó no solo una comparación, sino una confrontación de diferentes diseños y conceptos algorítmicos. Había una aspiradora de dos cepillos con una aspiradora de un solo cepillo, un modo de movimiento caótico consistente con el mapa de la habitación, las aspiradoras con una disposición lateral de cepillos con respecto al movimiento competirán con una aspiradora que tenga una disposición en forma de V.Posteriormente, lógicamente llegamos a la necesidad de crear un diagrama final con los resultados de mediciones objetivas y características de los robots, simplificando la elección del dispositivo de la futura mascota robótica. Planeamos actualizarlo después de cada prueba para compilar una calificación de eficiencia y optimización en términos de la relación calidad-precio de los robots en el mercado. Es cierto que en este artículo, una revisión detallada de Iclebo Arte y la serie V de Clever & Clean se dejó detrás de escena, ya que han estado en el mercado durante mucho tiempo y hay suficientes revisiones de diseños con apariencia, por lo tanto, se limitaron a solo un programa de prueba.
Los robots que saben acumular polvo en locales residenciales han ingresado al mercado ruso relativamente recientemente, pero ya han logrado evolucionar y, sin exagerar, se han convertido en los robots domésticos más comunes en nuestro país y en todo el mundo. Sin embargo, desde el momento de su aparición (2009) hasta el momento presente (2015), las disputas sobre sus beneficios y la justificación de tal adquisición no han disminuido en la sociedad. Después de todo, el dispositivo como era, y sigue siendo bastante caro, su costo, a veces supera el precio de una aspiradora potente clásica para la limpieza manual en 3-4 veces. Esto no se puede decir sobre el poder y la posibilidad fundamental de recolectar contaminantes del piso, ya que el robot es móvil y funciona con baterías, que en el nivel actual de desarrollo tecnológico no pueden almacenar energía en una escala de "kilovatios", accesible desde la salida para aspiradoras convencionales.Por lo tanto, especialmente a menudo en Internet, foros y solo en tiendas, surgen preguntas:Diremos de inmediato que inicialmente solo se planeó una descripción general del prometedor modelo TORNADO del fabricante francés e.ziclean, en cuyo ejemplo se suponía que realizaría una evaluación fundamental de las capacidades de las aspiradoras robóticas para la limpieza. Pero en el proceso de prueba hubo un interés incontrolable, si no entusiasmo, en verificar en el caso cualquier otro dispositivo de esta categoría para formar una impresión más holística de las capacidades de los robots. Un grupo de fanáticos formados alrededor de fabricantes individuales, listos para discutir las 24 horas sobre las ventajas de un modelo y las desventajas de otro, también hablan a favor de esto. Como resultado, se agregaron dos participantes más en la prueba: el muy popular Iclebo Arte en Rusia y la serie V Clever & Clean, que accidentalmente terminaron a nuestra disposición.Basado en las características de estos robots, resultó no solo una comparación, sino una confrontación de diferentes diseños y conceptos algorítmicos. Había una aspiradora de dos cepillos con una aspiradora de un solo cepillo, un modo de movimiento caótico consistente con el mapa de la habitación, las aspiradoras con una disposición lateral de cepillos con respecto al movimiento competirán con una aspiradora que tenga una disposición en forma de V.Posteriormente, lógicamente llegamos a la necesidad de crear un diagrama final con los resultados de mediciones objetivas y características de los robots, simplificando la elección del dispositivo de la futura mascota robótica. Planeamos actualizarlo después de cada prueba para compilar una calificación de eficiencia y optimización en términos de la relación calidad-precio de los robots en el mercado. Es cierto que en este artículo, una revisión detallada de Iclebo Arte y la serie V de Clever & Clean se dejó detrás de escena, ya que han estado en el mercado durante mucho tiempo y hay suficientes revisiones de diseños con apariencia, por lo tanto, se limitaron a solo un programa de prueba. MECANICA DE LIMPIEZA
Una aspiradora común conectada a una toma de corriente doméstica no sorprenderá a nadie ahora. Está tan fuertemente introducido en la vida cotidiana de cada persona moderna que se da por sentado. Considere la diferencia entre un limpiador automático.La aspiradora clásica, que se puede encontrar fácilmente en cualquier tienda de electrodomésticos, recoge el polvo debido a la aspiradora creada por una potente bomba que bombea una gran cantidad de aire a través de la parte de succión del dispositivo. Este mismo aire, que se mueve dentro de la aspiradora a una velocidad relativamente alta, elimina todo lo que se encuentra en el piso o en cualquier otra superficie para limpiar. En el interior, el polvo y la suciedad se mantienen en su lugar con un filtro, que puede tener un diseño muy diferente. Recientemente, los filtros de ciclón se están volviendo cada vez más populares cuando el aire contaminado se limpia por la fuerza centrífuga que surge en un tanque cilíndrico cuando el flujo de aire se retuerce de una manera especial. Es muy convenientepor lo que no necesita comprar bolsas adicionales para recoger el polvo; solo tiene que tirar la suciedad del recipiente de plástico después de la limpieza. Así es como se usa la aspiradora de mano Electrolux de referencia, que usamos para compararla con las aspiradoras robóticas.  Aspiradora doméstica normal tipo ciclón Electrolux y potencia 2200 vatios. Dado que una aspiradora doméstica común está conectada a una toma de corriente, de hecho, hay acceso a una fuente de energía "ilimitada", que todos los fabricantes utilizan activamente, sin excepción, al diseñar dispositivos, así como con fines de comercialización. Las aspiradoras alimentadas por una toma de corriente tienen una alta potencia, lo cual es confirmado por nuestro participante fuera de competencia: su potencia es de 2.2 kW.Y aquí viene la primera característica de los robots en el mercado diseñados para la limpieza autónoma de la habitación. El hecho es que para un movimiento independiente por la habitación con limpieza simultánea, el robot inevitablemente usará la batería incorporada. Esto es seguro y relativamente barato debido al hecho de que no hay necesidad de proporcionar mecanismos extremadamente complejos y, como resultado, costosos para evitar enredos de cables. Al limpiar con una aspiradora clásica, generalmente enderezamos el cable nosotros mismos y nos aseguramos de que no caiga en la zona de succión y no se extraiga de la toma de corriente. En el caso del robot, hoy es muy problemático hacerlo para que el producto final no cueste cientos de miles de rublos. Por lo tanto, solo la batería! En este caso, la capacidad promedio de la batería incorporada es de 2 a 6 A * h.Este stock solo es suficiente para garantizar la potencia de succión al nivel de 30-50 vatios. Como resultado, la única forma de garantizar una alta eficiencia de limpieza es equipar opcionalmente la aspiradora con un cepillo giratorio o dos, como se ha puesto de moda recientemente.La segunda diferencia importante entre un robot y una aspiradora convencional es que se limpia de forma independiente y no requiere la participación humana. Aquí, la capacidad del dispositivo para navegar en el espacio y cubrir toda el área sin dejar áreas sin limpiar para garantizar la máxima recolección de polvo. Esta habilidad, a su vez, depende del sistema de sensores, la unidad de computación, con o sin la capacidad de mapear la habitación y registrar en la memoria aquellas áreas que se limpian, identificar áreas no despejadas y planificar su limpieza secuencial. Por extraño que parezca, esto también es importante para una persona durante la limpieza manual, ya que tendemos a apresurarnos en el proceso de recolección de polvo, por lo que no hay raras omisiones al trabajar con una aspiradora común. Es aún más interesante descubrir la efectividad real de los diferentes métodos de recolección de polvo.
Aspiradora doméstica normal tipo ciclón Electrolux y potencia 2200 vatios. Dado que una aspiradora doméstica común está conectada a una toma de corriente, de hecho, hay acceso a una fuente de energía "ilimitada", que todos los fabricantes utilizan activamente, sin excepción, al diseñar dispositivos, así como con fines de comercialización. Las aspiradoras alimentadas por una toma de corriente tienen una alta potencia, lo cual es confirmado por nuestro participante fuera de competencia: su potencia es de 2.2 kW.Y aquí viene la primera característica de los robots en el mercado diseñados para la limpieza autónoma de la habitación. El hecho es que para un movimiento independiente por la habitación con limpieza simultánea, el robot inevitablemente usará la batería incorporada. Esto es seguro y relativamente barato debido al hecho de que no hay necesidad de proporcionar mecanismos extremadamente complejos y, como resultado, costosos para evitar enredos de cables. Al limpiar con una aspiradora clásica, generalmente enderezamos el cable nosotros mismos y nos aseguramos de que no caiga en la zona de succión y no se extraiga de la toma de corriente. En el caso del robot, hoy es muy problemático hacerlo para que el producto final no cueste cientos de miles de rublos. Por lo tanto, solo la batería! En este caso, la capacidad promedio de la batería incorporada es de 2 a 6 A * h.Este stock solo es suficiente para garantizar la potencia de succión al nivel de 30-50 vatios. Como resultado, la única forma de garantizar una alta eficiencia de limpieza es equipar opcionalmente la aspiradora con un cepillo giratorio o dos, como se ha puesto de moda recientemente.La segunda diferencia importante entre un robot y una aspiradora convencional es que se limpia de forma independiente y no requiere la participación humana. Aquí, la capacidad del dispositivo para navegar en el espacio y cubrir toda el área sin dejar áreas sin limpiar para garantizar la máxima recolección de polvo. Esta habilidad, a su vez, depende del sistema de sensores, la unidad de computación, con o sin la capacidad de mapear la habitación y registrar en la memoria aquellas áreas que se limpian, identificar áreas no despejadas y planificar su limpieza secuencial. Por extraño que parezca, esto también es importante para una persona durante la limpieza manual, ya que tendemos a apresurarnos en el proceso de recolección de polvo, por lo que no hay raras omisiones al trabajar con una aspiradora común. Es aún más interesante descubrir la efectividad real de los diferentes métodos de recolección de polvo. Revisión del aspirador robot TORNADO
Comenzamos la revisión del dispositivo con un conjunto completo. Una vez abierta la caja, el comprador encontrará directamente el robot y todo lo necesario para su trabajo habitual. 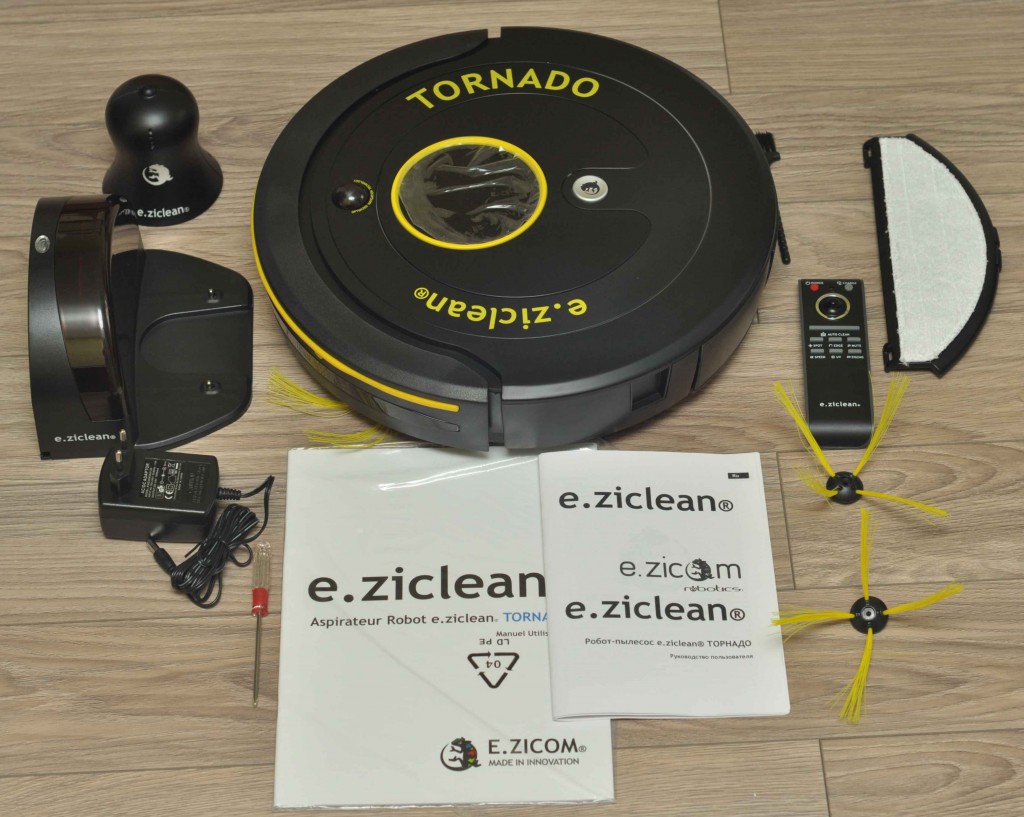 Las opciones se pueden llamar por encima del promedio. Además del robot requerido, una base de carga para él con una fuente de alimentación, instrucciones y una boquilla pulidora, el kit incluye: un conjunto de cepillos laterales de repuesto, una pared virtual, un control remoto que hace que la aspiradora sea más conveniente y cómoda, e incluso un destornillador.Ahora volvamos nuestros ojos al diseño. Aquí, a los desarrolladores se les ocurrieron muchas cosas interesantes.
Las opciones se pueden llamar por encima del promedio. Además del robot requerido, una base de carga para él con una fuente de alimentación, instrucciones y una boquilla pulidora, el kit incluye: un conjunto de cepillos laterales de repuesto, una pared virtual, un control remoto que hace que la aspiradora sea más conveniente y cómoda, e incluso un destornillador.Ahora volvamos nuestros ojos al diseño. Aquí, a los desarrolladores se les ocurrieron muchas cosas interesantes. Entonces TORNADO mira desde arriba.
Entonces TORNADO mira desde arriba.  Y así en la parte de atrás. Los cepillos descansan en el piso y están listos para comenzar.
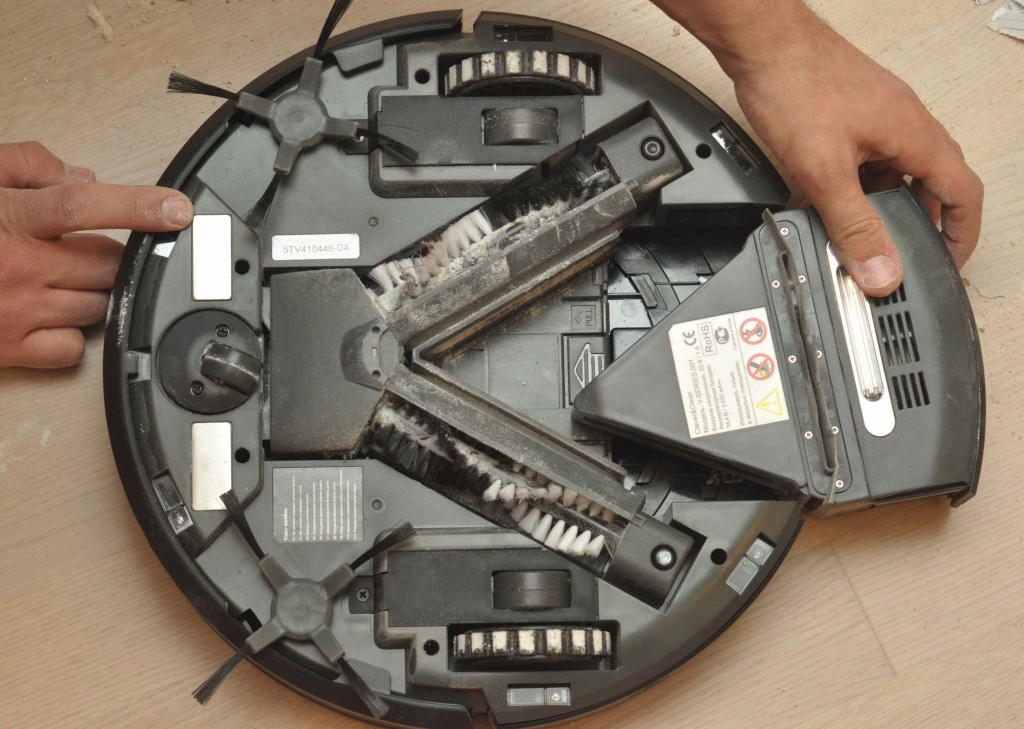
Y así en la parte de atrás. Los cepillos descansan en el piso y están listos para comenzar.  El diseño de la parte inferior de la aspiradora. En primer lugar, TORNADO está equipado con dos cepillos. Uno es más grande y aparentemente destinado a recolectar contaminantes más grandes, y el segundo es más compacto, aparentemente para pequeñas fracciones de suciedad.
El diseño de la parte inferior de la aspiradora. En primer lugar, TORNADO está equipado con dos cepillos. Uno es más grande y aparentemente destinado a recolectar contaminantes más grandes, y el segundo es más compacto, aparentemente para pequeñas fracciones de suciedad. 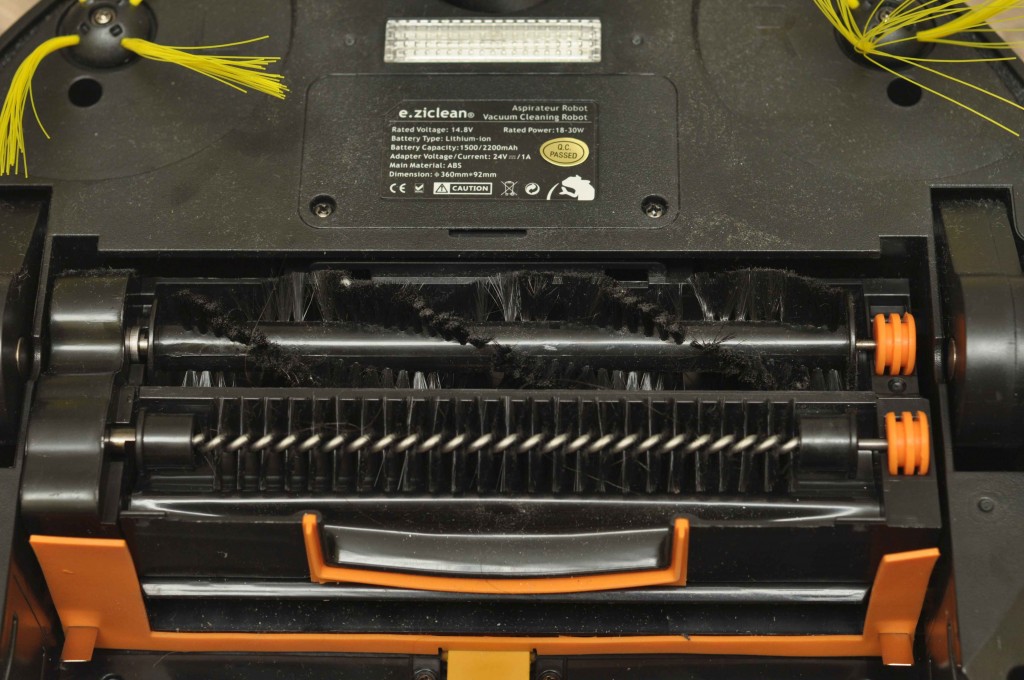
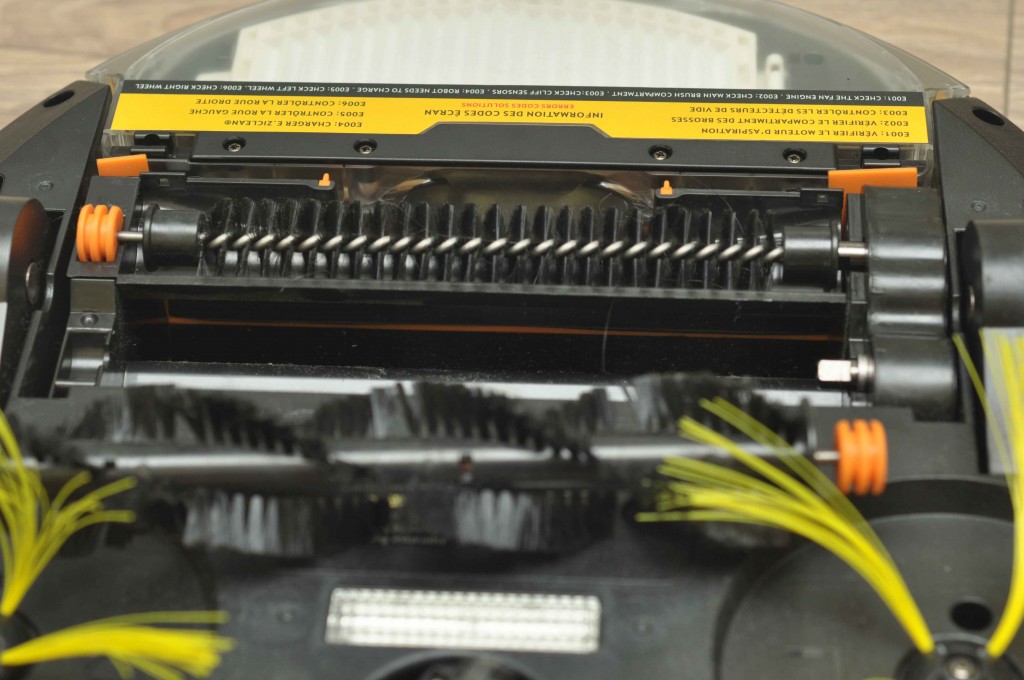 Los cepillos se retiran para limpiarlos con un movimiento de muñeca.
Los cepillos se retiran para limpiarlos con un movimiento de muñeca.  Cada cepillo tiene su propio canal para el movimiento de contaminantes dentro del contenedor. Es de destacar que cada cepillo funciona en su propio compartimento del contenedor para recoger el polvo. El más grande es para un canal ancho desde un cepillo grande, y un compartimiento muy pequeño (debajo del filtro) para un canal estrecho desde un cepillo pequeño.
Cada cepillo tiene su propio canal para el movimiento de contaminantes dentro del contenedor. Es de destacar que cada cepillo funciona en su propio compartimento del contenedor para recoger el polvo. El más grande es para un canal ancho desde un cepillo grande, y un compartimiento muy pequeño (debajo del filtro) para un canal estrecho desde un cepillo pequeño.  Contenedor de polvo extraíble con dos contenedores. La segunda gran característica de diseño es la turbina de bomba. Con su tamaño muy compacto, gira a una velocidad de 8000 rpm y, según el fabricante, proporciona una potencia de absorción sin precedentes.
Contenedor de polvo extraíble con dos contenedores. La segunda gran característica de diseño es la turbina de bomba. Con su tamaño muy compacto, gira a una velocidad de 8000 rpm y, según el fabricante, proporciona una potencia de absorción sin precedentes.  La bomba de turbina es compacta y se coloca directamente en el contenedor de polvo.
La bomba de turbina es compacta y se coloca directamente en el contenedor de polvo.  Y aquí está la bomba en sí. Las palas de la turbina son claramente visibles.
Y aquí está la bomba en sí. Las palas de la turbina son claramente visibles.  Contactos en la bomba por su potencia.
Contactos en la bomba por su potencia.  El aire es aspirado a través de un filtro especial. Como otra característica de la aspiradora es la capacidad de fijar un paño de microfibra en la parte inferior del robot. En este caso, el robot no solo barrerá y aspirará, sino que también limpiará los pisos. Lo principal es no olvidar humedecer la servilleta con agua antes del ciclo de limpieza.
El aire es aspirado a través de un filtro especial. Como otra característica de la aspiradora es la capacidad de fijar un paño de microfibra en la parte inferior del robot. En este caso, el robot no solo barrerá y aspirará, sino que también limpiará los pisos. Lo principal es no olvidar humedecer la servilleta con agua antes del ciclo de limpieza.  Una boquilla con un paño de microfibra en teoría le permite limpiar incluso más limpia. También es apropiado tener en cuenta el diseño de los cepillos de montaje. Es muy confiable y duradero, ya que se basa en rodamientos de metal.
Una boquilla con un paño de microfibra en teoría le permite limpiar incluso más limpia. También es apropiado tener en cuenta el diseño de los cepillos de montaje. Es muy confiable y duradero, ya que se basa en rodamientos de metal.  Cepillo de goma.
Cepillo de goma.  Y debajo hay un rodamiento. El resto del equipo del robot es bastante estándar.
Y debajo hay un rodamiento. El resto del equipo del robot es bastante estándar. 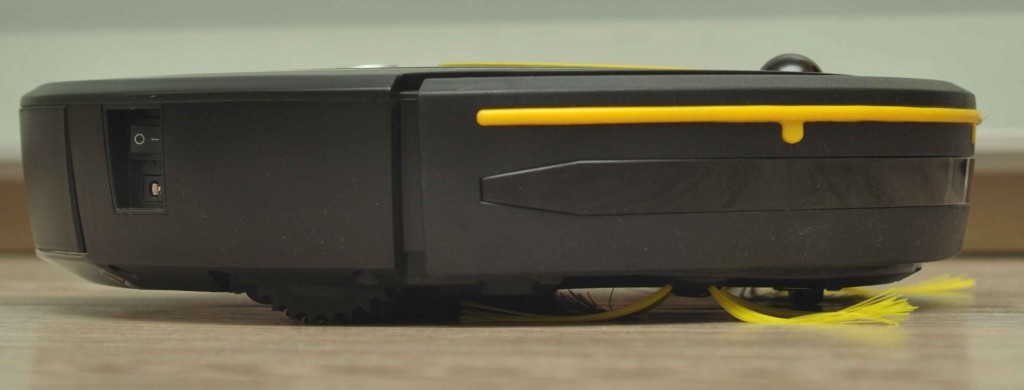 El robot está equipado con un cinturón de sensores ópticos que evitan colisiones con artículos domésticos.
El robot está equipado con un cinturón de sensores ópticos que evitan colisiones con artículos domésticos.  El control remoto es conveniente e informativo.
El control remoto es conveniente e informativo.  Pero cuando mira la pantalla siente una ligera falta de legibilidad, pero en general no hay problemas.
Pero cuando mira la pantalla siente una ligera falta de legibilidad, pero en general no hay problemas. 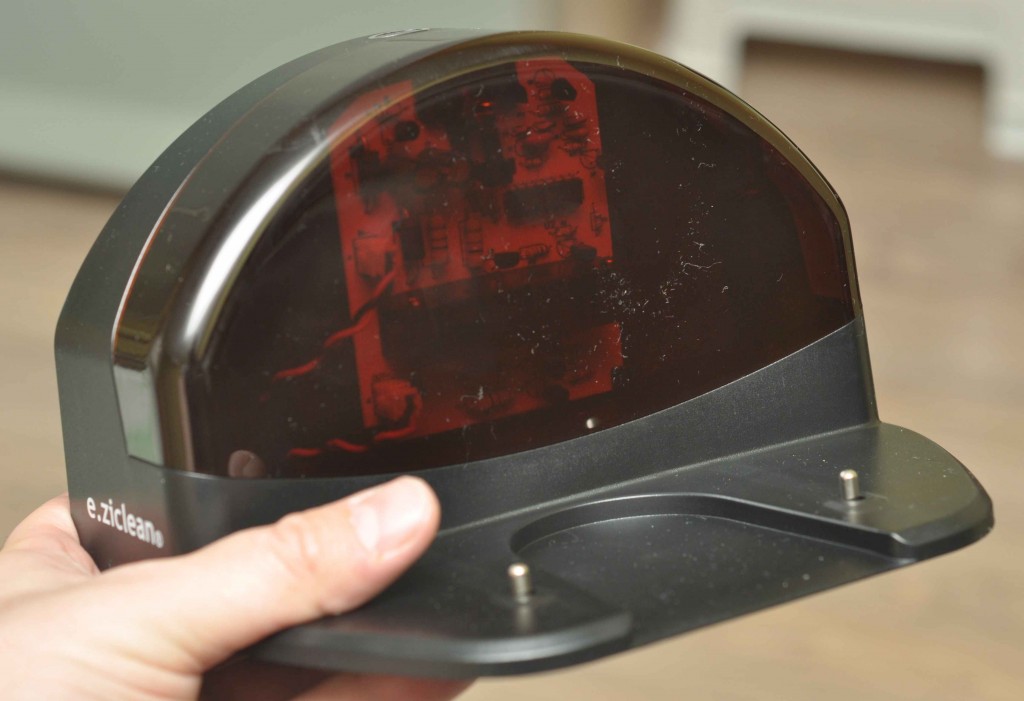 La base de carga se ve un poco extravagante. El vidrio es translúcido a través del cual el relleno electrónico es visible. Contactos para cargar una aspiradora de empuje.
La base de carga se ve un poco extravagante. El vidrio es translúcido a través del cual el relleno electrónico es visible. Contactos para cargar una aspiradora de empuje.  Este dispositivo lo ayuda a no dejar ir a donde no debería llamar.
Este dispositivo lo ayuda a no dejar ir a donde no debería llamar. Método de prueba
Con base en las preguntas que se plantearon al comienzo del artículo, así como desde la posición del resultado final deseado, el programa de prueba es obvio.Para que toda la superficie del piso esté completamente limpia de suciedad, el robot debe estar dotado de dos propiedades principales. En primer lugar, esta es la capacidad fundamental de recolectar cualitativamente todo tipo de contaminación doméstica. Y el segundo es la capacidad de navegar en interiores y planificar la limpieza de toda el área encomendada para que no haya áreas sin limpiar. Son estas habilidades las que probaremos en dos pruebas del mismo nombre. Además, estas consideraciones son válidas para aspiradoras de cualquier diseño.Para verificar la calidad de la recolección de suciedad, preparamos una pequeña arena. Los tamaños para medir este indicador no juegan un papel especial. Lo importante es el porcentaje de contaminación que el dispositivo puede recolectar. Intentamos simular la contaminación lo más cerca posible de las reales. En cada casa en el piso hay polvo fino, la harina actuó como tal, este es el polvo más difícil de recolectar. A menudo hay escombros más grandes, como migas o arena de la calle: el azúcar granulada y las migas de pan fueron arrastradas por ellos. Por supuesto, algo bastante específico puede caer bajo las ruedas, por lo que agregamos agujas de abeto y trozos de papel. Todo esto se mezcló en cantidades aproximadamente iguales y recibió 50 gramos de la mezcla de prueba.Deliberadamente, no agregamos botones a monedas y objetos similares relativamente grandes a nuestra "suciedad" (como hacen los probadores de otras publicaciones), porque estamos convencidos de que la aspiradora robot no fue creada para recolectar dinero u otros objetos útiles de su piso . Observe la composición de lo que tira de una aspiradora convencional, y comprenderá qué características específicas son la suciedad recolectada del piso, en absoluto las monedas.  Materias primas para la mezcla "infernal".
Materias primas para la mezcla "infernal".  Total de 50 gramos para "comer" el robot.
Total de 50 gramos para "comer" el robot.  Extienda el barro artificial de manera uniforme en la arena Todo está listo para probar. En consecuencia, al comenzar con 50 gramos de suciedad condicional, iniciamos la aspiradora en el ciclo de trabajo, después de lo cual pesamos todo lo que pudo recolectar y determinamos el porcentaje de polvo recolectado. Haga inmediatamente una reserva de que la naturaleza de esta prueba depende del sistema de navegación del robot. Solo puede moverse a lo largo de una trayectoria caótica; en este caso, se le da tiempo para limpiar 5 minutos. Y puede estar dotado de una visión más avanzada y, como resultado, limpiar el área de forma secuencial, luego se limpiará hasta que todo esté limpio. Esto seguirá siendo más rápido que 5 minutos, porque dos veces el robot no pasa por el mismo lugar.La segunda prueba tiene como objetivo investigar la capacidad de un limpiador inteligente para limpiar el área máxima. Es muy difícil llevarlo a cabo, por lo que hemos desarrollado un sistema de evaluación "marcador" para esto. Se encuentra en el hecho de que en cuatro habitaciones comunicadas (habitaciones en el apartamento) con un área total de 63 metros cuadrados. m. somos al azar, pero al mismo tiempo esparcemos de manera uniforme trozos de papel. Iniciamos el robot en el ciclo de trabajo y luego contamos el número de piezas de papel recogidas. Como resultado, obtenemos el porcentaje del área limpia en base a la suposición de que si el robot cubre el área completa, entonces recolectará todas las piezas y la probabilidad de que pase solo en pedazos de papel, sin quitar el área completa, tiende a cero.
Extienda el barro artificial de manera uniforme en la arena Todo está listo para probar. En consecuencia, al comenzar con 50 gramos de suciedad condicional, iniciamos la aspiradora en el ciclo de trabajo, después de lo cual pesamos todo lo que pudo recolectar y determinamos el porcentaje de polvo recolectado. Haga inmediatamente una reserva de que la naturaleza de esta prueba depende del sistema de navegación del robot. Solo puede moverse a lo largo de una trayectoria caótica; en este caso, se le da tiempo para limpiar 5 minutos. Y puede estar dotado de una visión más avanzada y, como resultado, limpiar el área de forma secuencial, luego se limpiará hasta que todo esté limpio. Esto seguirá siendo más rápido que 5 minutos, porque dos veces el robot no pasa por el mismo lugar.La segunda prueba tiene como objetivo investigar la capacidad de un limpiador inteligente para limpiar el área máxima. Es muy difícil llevarlo a cabo, por lo que hemos desarrollado un sistema de evaluación "marcador" para esto. Se encuentra en el hecho de que en cuatro habitaciones comunicadas (habitaciones en el apartamento) con un área total de 63 metros cuadrados. m. somos al azar, pero al mismo tiempo esparcemos de manera uniforme trozos de papel. Iniciamos el robot en el ciclo de trabajo y luego contamos el número de piezas de papel recogidas. Como resultado, obtenemos el porcentaje del área limpia en base a la suposición de que si el robot cubre el área completa, entonces recolectará todas las piezas y la probabilidad de que pase solo en pedazos de papel, sin quitar el área completa, tiende a cero.  Mediremos el porcentaje de área limpia a través del número de trozos de papel recogidos. El tercer ejercicio es superar las barreras. Muchos en el apartamento o la casa tienen alféizares o revestimientos decorativos en el piso, por lo que la capacidad de una aspiradora para moverse a través de ellos es importante. Como parte de esta prueba, comprobaremos qué tan transitables son nuestros participantes.Bueno, la cuarta prueba es más de una naturaleza de espectáculo, sin embargo, le permite evaluar visualmente los procesos físicos que ocurren durante la operación del robot. En otras palabras, tratamos de mirar dentro de la aspiradora durante el desempeño de sus tareas directas, para descubrir si el polvo realmente se absorbe. Lo hicimos invitando al robot a limpiar el vidrio. Se tomaron fotos y videos desde la parte posterior del cristal, para que quede claro de inmediato si esos escépticos que consideran que esta categoría de robots son escobas eléctricas comunes tienen razón.
Mediremos el porcentaje de área limpia a través del número de trozos de papel recogidos. El tercer ejercicio es superar las barreras. Muchos en el apartamento o la casa tienen alféizares o revestimientos decorativos en el piso, por lo que la capacidad de una aspiradora para moverse a través de ellos es importante. Como parte de esta prueba, comprobaremos qué tan transitables son nuestros participantes.Bueno, la cuarta prueba es más de una naturaleza de espectáculo, sin embargo, le permite evaluar visualmente los procesos físicos que ocurren durante la operación del robot. En otras palabras, tratamos de mirar dentro de la aspiradora durante el desempeño de sus tareas directas, para descubrir si el polvo realmente se absorbe. Lo hicimos invitando al robot a limpiar el vidrio. Se tomaron fotos y videos desde la parte posterior del cristal, para que quede claro de inmediato si esos escépticos que consideran que esta categoría de robots son escobas eléctricas comunes tienen razón. PRUEBA número 1. Investigamos la capacidad de recoger la contaminación.
Pasamos directamente a pruebas prácticas. Dispersamos 50 g de contaminación en nuestra arena, lanzamos el robot para una sesión de trabajo de 5 minutos y evaluamos los resultados.  Al comienzo de la limpieza, puede ver claramente cómo la aspiradora absorbe con confianza la suciedad.
Al comienzo de la limpieza, puede ver claramente cómo la aspiradora absorbe con confianza la suciedad.  Vista general de la superficie limpia después de un ciclo de trabajo de 5 minutos. Antes de evaluar la calidad de la limpieza, diré algunas palabras sobre las impresiones subjetivas del robot. La impresión general es que realmente aspira. Esto se manifiesta tanto en la desaparición del polvo en tiempo real como en un sonido característico. Y si coloca la mano en la parte posterior de la aspiradora durante el funcionamiento, puede sentir claramente una corriente de aire bastante poderosa: la palabra Tornado se llamó por una razón. El robot se mueve realmente al azar, pero esta aleatoriedad es muy racional y el dispositivo no solo "cubrió" rápidamente toda el área, sino que también intentó pasar a lo largo de las paredes. Es decir, la aspiradora se comportó de forma racional y justificó plenamente su perfil robótico.Bueno, ahora, de hecho, sobre los resultados de su trabajo. La foto muestra claramente que, en general, se limpia el área principal, pero hay algunas dificultades con las esquinas. Son causados por la falta de voluntad del Tornado para acercarse a las paredes. Como notamos en la parte de descripción general, hay sensores de distancia infrarrojos en el parachoques delantero que protegen la aspiradora de chocar con muebles y varios obstáculos, y nos pareció que estaban configurados (o que el software fue escrito) groseramente, con un gran margen, lo que hace que el robot no alcance notablemente a las paredes Los cepillos laterales largos ahorran, pero no siempre. Como resultado, tenemos lo que tenemos.Vierta cuidadosa y minuciosamente el "resultado del trabajo" en una bolsa y pese sobre la balanza, después de transferirlos al modo de no tener en cuenta los contenedores.
Vista general de la superficie limpia después de un ciclo de trabajo de 5 minutos. Antes de evaluar la calidad de la limpieza, diré algunas palabras sobre las impresiones subjetivas del robot. La impresión general es que realmente aspira. Esto se manifiesta tanto en la desaparición del polvo en tiempo real como en un sonido característico. Y si coloca la mano en la parte posterior de la aspiradora durante el funcionamiento, puede sentir claramente una corriente de aire bastante poderosa: la palabra Tornado se llamó por una razón. El robot se mueve realmente al azar, pero esta aleatoriedad es muy racional y el dispositivo no solo "cubrió" rápidamente toda el área, sino que también intentó pasar a lo largo de las paredes. Es decir, la aspiradora se comportó de forma racional y justificó plenamente su perfil robótico.Bueno, ahora, de hecho, sobre los resultados de su trabajo. La foto muestra claramente que, en general, se limpia el área principal, pero hay algunas dificultades con las esquinas. Son causados por la falta de voluntad del Tornado para acercarse a las paredes. Como notamos en la parte de descripción general, hay sensores de distancia infrarrojos en el parachoques delantero que protegen la aspiradora de chocar con muebles y varios obstáculos, y nos pareció que estaban configurados (o que el software fue escrito) groseramente, con un gran margen, lo que hace que el robot no alcance notablemente a las paredes Los cepillos laterales largos ahorran, pero no siempre. Como resultado, tenemos lo que tenemos.Vierta cuidadosa y minuciosamente el "resultado del trabajo" en una bolsa y pese sobre la balanza, después de transferirlos al modo de no tener en cuenta los contenedores.  El contenedor después del ciclo de trabajo. La mayor parte de la contaminación estaba adentro.
El contenedor después del ciclo de trabajo. La mayor parte de la contaminación estaba adentro.  Pequeños restos en un compartimento pequeño y en un compartimento grande: grandes y ... También pequeños.
Pequeños restos en un compartimento pequeño y en un compartimento grande: grandes y ... También pequeños.  Recolectamos polvo para pesar.
Recolectamos polvo para pesar.  Obtenemos 32 gramos, que es el 64% del lodo originalmente disperso. Para ser justos, desafiamos todo en una primicia, que no tuvo la suerte de estar en el útero del robot, y se sumó a la masa total de los extraídos. El resultado fue a primera vista un poco inesperado, pero lógico: 45 gramos. Es decir quedan aproximadamente 5 gramos en el dispositivo a pesar de haber sido barridos del contenedor.
Obtenemos 32 gramos, que es el 64% del lodo originalmente disperso. Para ser justos, desafiamos todo en una primicia, que no tuvo la suerte de estar en el útero del robot, y se sumó a la masa total de los extraídos. El resultado fue a primera vista un poco inesperado, pero lógico: 45 gramos. Es decir quedan aproximadamente 5 gramos en el dispositivo a pesar de haber sido barridos del contenedor.  Inacabado La contaminación permanece en el cepillo, en los canales y en las superficies internas. Creemos que es correcto contar solo lo que se raspa del contenedor, ya que en la abrumadora mayoría de los casos al propietario de este dispositivo le gustaría tirar la suciedad solo del recolector de polvo y no limpiarla de toda la aspiradora después de cada limpieza. Por supuesto, es necesario limpiar el robot por completo, pero puede hacerlo una vez en varias limpiezas (por ejemplo, una vez por semana), por lo que solo la captura del contenedor caerá en la mesa final.Aquí es donde surgió la emoción, que mencioné al principio del artículo. Pero, ¿qué otros aspiradores robóticos pueden demostrar?El primero después del Tornado llega a la serie V de Clever & Clean "shell". En cuanto a la navegación, funciona de la misma manera: el modo de movimiento es caótico. Los mismos 50 gramos, 5 minutos de trabajo duro y ...
Inacabado La contaminación permanece en el cepillo, en los canales y en las superficies internas. Creemos que es correcto contar solo lo que se raspa del contenedor, ya que en la abrumadora mayoría de los casos al propietario de este dispositivo le gustaría tirar la suciedad solo del recolector de polvo y no limpiarla de toda la aspiradora después de cada limpieza. Por supuesto, es necesario limpiar el robot por completo, pero puede hacerlo una vez en varias limpiezas (por ejemplo, una vez por semana), por lo que solo la captura del contenedor caerá en la mesa final.Aquí es donde surgió la emoción, que mencioné al principio del artículo. Pero, ¿qué otros aspiradores robóticos pueden demostrar?El primero después del Tornado llega a la serie V de Clever & Clean "shell". En cuanto a la navegación, funciona de la misma manera: el modo de movimiento es caótico. Los mismos 50 gramos, 5 minutos de trabajo duro y ...  Visualmente, el robot recoge la contaminación no con tanta confianza como el Tornado.
Visualmente, el robot recoge la contaminación no con tanta confianza como el Tornado.  Aunque el resultado fue casi el mismo, y las esquinas parecían aún más limpias. En principio, visualmente en el área principal el resultado es el mismo, las esquinas están aún más arregladas. Y ya estábamos listos para pesar el control, ya que el robot Clever & Clean nos presentó una sorpresa inesperada. Cuando uno de los probadores levantó la aspiradora, esta imagen apareció a nuestros ojos.
Aunque el resultado fue casi el mismo, y las esquinas parecían aún más limpias. En principio, visualmente en el área principal el resultado es el mismo, las esquinas están aún más arregladas. Y ya estábamos listos para pesar el control, ya que el robot Clever & Clean nos presentó una sorpresa inesperada. Cuando uno de los probadores levantó la aspiradora, esta imagen apareció a nuestros ojos.  Resulta que, por alguna razón, el dispositivo no pudo absorber trozos de papel. Exteriormente, desaparecieron del piso después del paso de la aspiradora, pero como resultado, recogieron cuidadosamente la máquina y arrastraron debajo del fondo durante la limpieza. Además, parece extraño que este modelo también tenga una bomba potente y que el aire sea atraído a través del contenedor de manera subjetiva, no menos intensa que el Tornado. Y Clever & Clean zumba durante la limpieza y, en general, como una aspiradora para adultos de 2 kilovatios. Intentemos analizar y desentrañar las causas de lo que está sucediendo en el proceso de la prueba No. 4, pero por ahora sopesamos el contenido del contenedor.
Resulta que, por alguna razón, el dispositivo no pudo absorber trozos de papel. Exteriormente, desaparecieron del piso después del paso de la aspiradora, pero como resultado, recogieron cuidadosamente la máquina y arrastraron debajo del fondo durante la limpieza. Además, parece extraño que este modelo también tenga una bomba potente y que el aire sea atraído a través del contenedor de manera subjetiva, no menos intensa que el Tornado. Y Clever & Clean zumba durante la limpieza y, en general, como una aspiradora para adultos de 2 kilovatios. Intentemos analizar y desentrañar las causas de lo que está sucediendo en el proceso de la prueba No. 4, pero por ahora sopesamos el contenido del contenedor. 
 Serie V después del trabajo. La disposición en forma de V de los cepillos mostró una eficiencia relativamente baja. El resultado es 28 gramos, lo que significa 56%. Obviamente, si no fuera por el papel que queda en el piso después del trabajo, esta muestra de pensamiento técnico bien podría repetir el resultado del Tornado, y así, una pérdida del 8%.Con el tercer participante de la prueba, es más difícil. El Iclebo Arte difiere del Tornado y la Serie V en un sistema de navegación mucho más avanzado. Está equipado con una cámara de video que, según el fabricante, le permite hacer un mapa de la habitación y trazar una ruta, por lo que el robot puede moverse por el apartamento no solo en modo caótico, sino también en una trayectoria en zigzag, asegurando la ausencia de áreas no despejadas. El ojo que todo lo ve también ayuda a volver a la base con más confianza. Por lo tanto, pensamos que simplemente teníamos que verificar la efectividad del robot en dos modos: caótico y secuencial.Comencemos con uno por uno. Es de destacar que con este diseño de prueba, surge otra característica: el tiempo de limpieza. Si en el modo caótico, en el caso general, se retira el robot hasta que la batería esté vacía, entonces en el modo secuencial terminará cuando quite todo. Por lo tanto, tenemos que hablar sobre el tiempo.
Serie V después del trabajo. La disposición en forma de V de los cepillos mostró una eficiencia relativamente baja. El resultado es 28 gramos, lo que significa 56%. Obviamente, si no fuera por el papel que queda en el piso después del trabajo, esta muestra de pensamiento técnico bien podría repetir el resultado del Tornado, y así, una pérdida del 8%.Con el tercer participante de la prueba, es más difícil. El Iclebo Arte difiere del Tornado y la Serie V en un sistema de navegación mucho más avanzado. Está equipado con una cámara de video que, según el fabricante, le permite hacer un mapa de la habitación y trazar una ruta, por lo que el robot puede moverse por el apartamento no solo en modo caótico, sino también en una trayectoria en zigzag, asegurando la ausencia de áreas no despejadas. El ojo que todo lo ve también ayuda a volver a la base con más confianza. Por lo tanto, pensamos que simplemente teníamos que verificar la efectividad del robot en dos modos: caótico y secuencial.Comencemos con uno por uno. Es de destacar que con este diseño de prueba, surge otra característica: el tiempo de limpieza. Si en el modo caótico, en el caso general, se retira el robot hasta que la batería esté vacía, entonces en el modo secuencial terminará cuando quite todo. Por lo tanto, tenemos que hablar sobre el tiempo.  La aspiradora, de hecho, pasó por toda el área asignada a él para su limpieza. El tiempo de limpieza fue de 1 minuto y 42 segundos, que es casi tres veces más rápido que el de los robots en modo caótico. Pero al mismo tiempo, el resultado de peso fue de 27 gramos, es decir 54%, comparable a los rivales que limpian el piso notablemente más tiempo.
La aspiradora, de hecho, pasó por toda el área asignada a él para su limpieza. El tiempo de limpieza fue de 1 minuto y 42 segundos, que es casi tres veces más rápido que el de los robots en modo caótico. Pero al mismo tiempo, el resultado de peso fue de 27 gramos, es decir 54%, comparable a los rivales que limpian el piso notablemente más tiempo.  Para formar una imagen más completa de las capacidades de Iclebo Arte, ejecútelo en las mismas condiciones que los demás participantes, en modo caótico durante 5 minutos.
Para formar una imagen más completa de las capacidades de Iclebo Arte, ejecútelo en las mismas condiciones que los demás participantes, en modo caótico durante 5 minutos.  El resultado de limpiar Iclebo Arte en el caos parece muy convincente. La imagen con el resultado de la limpieza se ve impresionante. No solo se eliminó todo del área principal, sino que el robot trabajó el perímetro con mucho cuidado y las esquinas, donde quedaba muy poca suciedad, se vieron afectadas por cepillos laterales muy suaves que se ajustaban perfectamente a la superficie del piso. Esto a pesar del hecho de que la aspiradora es prácticamente silenciosa y no tiene un flujo de aire tan potente en la salida como otros participantes. Y el diseño no se jacta de "megaprogresivo": solo un cepillo, sin turbinas y un contenedor sin ninguna característica de diseño. Sopesar el resultado de los trabajos.
El resultado de limpiar Iclebo Arte en el caos parece muy convincente. La imagen con el resultado de la limpieza se ve impresionante. No solo se eliminó todo del área principal, sino que el robot trabajó el perímetro con mucho cuidado y las esquinas, donde quedaba muy poca suciedad, se vieron afectadas por cepillos laterales muy suaves que se ajustaban perfectamente a la superficie del piso. Esto a pesar del hecho de que la aspiradora es prácticamente silenciosa y no tiene un flujo de aire tan potente en la salida como otros participantes. Y el diseño no se jacta de "megaprogresivo": solo un cepillo, sin turbinas y un contenedor sin ninguna característica de diseño. Sopesar el resultado de los trabajos. 
 Iclebo Arte después de la cosecha. La simplicidad relativa del diseño, que no se ajustaba para mostrar un resultado decente en la calidad de la limpieza, es claramente visible. Y es tanto como 40 gramos, es decir 80% Un resultado muy interesante, que da lugar a un paradigma lógico: un robot aspirador, que ha pasado varias veces en el mismo lugar, lo limpia notablemente mejor que si lo atraviesa. Pero esto funciona para un área pequeña, y en un área grande, especialmente si consta de varias habitaciones separadas, el dispositivo corre el riesgo de no visitar todas partes antes de que se agote la batería y, como resultado, dejar áreas separadas sin limpiar. Verificaremos esto en nuestro próximo experimento.Al final de la descripción de los resultados de esta prueba, observamos la característica general del trabajo de todos los participantes. Como se esperaba, la tarea más difícil para los limpiadores automáticos era la tarea de recolectar polvo muy fino. Cae en la microrrugosidad de la superficie del piso y es muy difícil barrerlo. Además, las fuerzas electrostáticas que atraen partículas al piso evitan el barrido. Por lo tanto, si coloca la mano en el piso después de la limpieza, puede encontrar fácilmente que la superficie no está perfectamente limpia.
Iclebo Arte después de la cosecha. La simplicidad relativa del diseño, que no se ajustaba para mostrar un resultado decente en la calidad de la limpieza, es claramente visible. Y es tanto como 40 gramos, es decir 80% Un resultado muy interesante, que da lugar a un paradigma lógico: un robot aspirador, que ha pasado varias veces en el mismo lugar, lo limpia notablemente mejor que si lo atraviesa. Pero esto funciona para un área pequeña, y en un área grande, especialmente si consta de varias habitaciones separadas, el dispositivo corre el riesgo de no visitar todas partes antes de que se agote la batería y, como resultado, dejar áreas separadas sin limpiar. Verificaremos esto en nuestro próximo experimento.Al final de la descripción de los resultados de esta prueba, observamos la característica general del trabajo de todos los participantes. Como se esperaba, la tarea más difícil para los limpiadores automáticos era la tarea de recolectar polvo muy fino. Cae en la microrrugosidad de la superficie del piso y es muy difícil barrerlo. Además, las fuerzas electrostáticas que atraen partículas al piso evitan el barrido. Por lo tanto, si coloca la mano en el piso después de la limpieza, puede encontrar fácilmente que la superficie no está perfectamente limpia.  Después de una limpieza simple, la aspiradora deja las micropartículas sin limpiar, que, sin embargo, si barre el piso manualmente con una escoba, también permanecerán donde estaban.¿Es posible obtener una mejor calidad de limpieza de los robots? Resulta que puedes. Es suficiente instalar una boquilla en la aspiradora con un paño de microfibra humedecido con agua antes del ciclo de trabajo, si, por supuesto, está previsto por el diseño y el alcance de la entrega. Gracias a las fibras de tamaño nanométrico, una servilleta de este tipo tomará todo lo que el cepillo de la aspiradora no pudo quitar y succionará la bomba de vacío.
Después de una limpieza simple, la aspiradora deja las micropartículas sin limpiar, que, sin embargo, si barre el piso manualmente con una escoba, también permanecerán donde estaban.¿Es posible obtener una mejor calidad de limpieza de los robots? Resulta que puedes. Es suficiente instalar una boquilla en la aspiradora con un paño de microfibra humedecido con agua antes del ciclo de trabajo, si, por supuesto, está previsto por el diseño y el alcance de la entrega. Gracias a las fibras de tamaño nanométrico, una servilleta de este tipo tomará todo lo que el cepillo de la aspiradora no pudo quitar y succionará la bomba de vacío.  Una boquilla con un paño de microfibra húmedo mejora en gran medida la acumulación de polvo fino.
Una boquilla con un paño de microfibra húmedo mejora en gran medida la acumulación de polvo fino.  Y después de una limpieza tan prolongada, ya no quedan rastros del piso. Por lo tanto, si desea lograr una limpieza máxima comparable con el mismo resultado que después de la limpieza en húmedo, asegúrese de usar servilletas si el diseño del robot aspirador las proporciona.
Y después de una limpieza tan prolongada, ya no quedan rastros del piso. Por lo tanto, si desea lograr una limpieza máxima comparable con el mismo resultado que después de la limpieza en húmedo, asegúrese de usar servilletas si el diseño del robot aspirador las proporciona. PRUEBA número 2. ROBOT despega todos los apartamentos
Esta prueba no es tan interesante desde un punto de vista visual, sin embargo, le permite sacar inmediatamente una conclusión con respecto a la perfección de navegación y algorítmica del robot, lo que afecta en última instancia el indicador integral (total) del rendimiento del robot en la limpieza de la habitación.Por cierto, sobre el indicador integral. Si aceptamos la suposición de que el polvo se distribuye de manera uniforme en todo el departamento (y este es el caso en la mayoría de las habitaciones, si hablamos de polvo doméstico común, y no de contaminación local o de edificios específicos), entonces la eficiencia total de limpieza del robot se puede estimar multiplicando el porcentaje de polvo recolectado por el porcentaje área cubierta. Es decir Resulta que sabiendo cuánto recolecta básicamente la aspiradora del polvo en el piso en términos porcentuales y teniendo los datos de qué fracción del área limpia sin pasar, multiplicando uno por el otro, obtenemos el porcentaje de polvo recolectado de todos los disponibles en el apartamento.Entonces, esparcimos 30 pedazos pequeños de papel (los llamaremos marcadores) en tres habitaciones e invitamos a cada aspiradora a recogerlos por turnos. Para la pureza del experimento, realizamos dos pruebas para todos los participantes y promediamos los resultados de las dos carreras. Esto es lo que pasó.1. Serie V inteligente y limpia: 15 marcadores de 30 a 50%;2. Iclebo Arte (modo secuencial) - 28 marcadores de 30 - 93.3%;3. Iclebo Arte (modo caótico) - 25 marcadores de 30 - 83.3%;4. e.ziclean TORNADO - 21 marcadores de 30 - 70%.En total, obtenemos la siguiente distribución de resultados por el indicador integral (el indicador máximo posible es la unidad).1. Iclebo Arte (modo secuencial) - 0.504 o 50.4% del polvo presente en el departamento al momento de la limpieza;2. Iclebo Arte (modo caótico): 0.666 o 66.6% del polvo presente en el departamento al momento de la limpieza;3. e.ziclean TORNADO - 0.448 o 44.8% del polvo presente en el departamento al momento de la limpieza;4. Serie V inteligente y limpia: 0.28 o 28% del polvo presente en el departamento al momento de la limpieza.A primera vista, no mucho. Sin embargo, si observa esta situación de manera exhaustiva, todo resultará no tan malo e incluso bueno. Después de todo, en primer lugar, este es un robot eliminado y prácticamente no pasa su tiempo personal en este procedimiento. Y en segundo lugar, debido al hecho de que la limpieza se realiza por usted, puede y debe hacerse a diario. La mayoría de los modelos de aspiradoras automáticas (con la excepción de las más simples y económicas) admiten la limpieza programada y pueden hacerlo incluso cuando no está en casa. Si está en casa, el robot no requerirá un arranque y comenzará a limpiarse solo. Durante la limpieza diaria, el polvo recién emergido no tendrá tiempo de ser aplastado en el piso y se limpiará inmediatamente con una aspiradora, por lo tanto, el robot reducirá seriamente su cantidad durante todo el período entre limpiezas húmedas y, como resultado,respirarás aire limpio todo este tiempo. Sin embargo, dejaremos las conclusiones principales con respecto a la eficiencia general de las aspiradoras robóticas hasta la sección del mismo nombre en nuestro artículo, las ilustraremos gráficamente en el mismo lugar, pero por ahora procedemos a la siguiente prueba. PRUEBA número 3. SUPERAR BARRERAS
Para evaluar la permeabilidad de los robots, utilizamos listones de madera de diferentes grosores y formas rectangulares con una altura de 7 mm, 14 mm, 18 mm y 20 mm. En este estudio, no hay trucos y sutilezas particulares: el robot supera la barrera de la altura propuesta o no supera, por lo que no escribiré mucho, sino que simplemente daré los resultados de la prueba.  Un tornado pudo superar un umbral de solo 7 mm de altura.
Un tornado pudo superar un umbral de solo 7 mm de altura.  La serie V inteligente y limpia tampoco podía presumir de algo sobresaliente: los mismos 7 mm.
La serie V inteligente y limpia tampoco podía presumir de algo sobresaliente: los mismos 7 mm.  Pero Iclebo, gracias a un modo especial de superar obstáculos (activado de forma predeterminada y se puede desactivar por la fuerza), solo fue un poco incapaz de alcanzar la altura máxima que planeamos verificar en el marco de esta prueba (20 mm). Claro 18 mm. En pocas palabras, los robots perciben un obstáculo de diferentes maneras. Existe la sensación de que los sensores en Clever & clean y Tornado están configurados para una alta sensibilidad y en cualquier situación de emergencia, que se puede atribuir a una barrera por encima de 7 mm, están "asustados": comienzan a moverse de un lado a otro, girar y finalmente salir. Iclebo, en este sentido, es mucho más "intrépido" y ataca de manera muy agresiva los obstáculos que caen bajo el volante cuando se activa el modo empresa. Aunque 7 mm es una altura que rara vez es superada por la gran mayoría de los revestimientos que ocultan la brecha entre la transición del piso de una habitación al piso de la habitación de otra. Por lo tanto, las capacidades demostradas de los participantes en nuestra prueba deberían ser suficientes para un movimiento seguro entre las habitaciones. Bueno, en el caso de Iclebo, no tienes que preocuparte por nada.
Pero Iclebo, gracias a un modo especial de superar obstáculos (activado de forma predeterminada y se puede desactivar por la fuerza), solo fue un poco incapaz de alcanzar la altura máxima que planeamos verificar en el marco de esta prueba (20 mm). Claro 18 mm. En pocas palabras, los robots perciben un obstáculo de diferentes maneras. Existe la sensación de que los sensores en Clever & clean y Tornado están configurados para una alta sensibilidad y en cualquier situación de emergencia, que se puede atribuir a una barrera por encima de 7 mm, están "asustados": comienzan a moverse de un lado a otro, girar y finalmente salir. Iclebo, en este sentido, es mucho más "intrépido" y ataca de manera muy agresiva los obstáculos que caen bajo el volante cuando se activa el modo empresa. Aunque 7 mm es una altura que rara vez es superada por la gran mayoría de los revestimientos que ocultan la brecha entre la transición del piso de una habitación al piso de la habitación de otra. Por lo tanto, las capacidades demostradas de los participantes en nuestra prueba deberían ser suficientes para un movimiento seguro entre las habitaciones. Bueno, en el caso de Iclebo, no tienes que preocuparte por nada. PRUEBA número 4. LIMPIEZA, VISTA INTERIOR
La parte más espectacular de nuestro programa de pruebas, por supuesto, la guardamos para el final. Hacemos todo como en la prueba No. 1, con la única diferencia de que la acción tiene lugar sobre el vidrio.  La misma contaminación, las aspiradoras también. Pero se eliminan en el cristal.
La misma contaminación, las aspiradoras también. Pero se eliminan en el cristal.  Las fotos no transmiten bien la dinámica. Pero el video muestra claramente cómo desaparece la suciedad sin dejar rastro en el útero del automóvil. La succión es muy activa.
Las fotos no transmiten bien la dinámica. Pero el video muestra claramente cómo desaparece la suciedad sin dejar rastro en el útero del automóvil. La succión es muy activa.  El trabajo de Icleabo sobre el vidrio se ve aún más espectacular que en el piso. El rascador de goma suave no deja polvo. La suciedad desaparece dentro tan activamente como el Tornado.
El trabajo de Icleabo sobre el vidrio se ve aún más espectacular que en el piso. El rascador de goma suave no deja polvo. La suciedad desaparece dentro tan activamente como el Tornado.  Pero la serie V inteligente y limpia sobre vidrio expuso el motivo de la sorpresa de la primera prueba. No hay absolutamente nada que agregar sobre las aspiradoras coreanas y francesas, confirmaron visualmente la calidad de su trabajo: efectivamente barren y absorben. Y en la serie V de Clever & clean vale la pena detenerse con más detalle.Un modelo de aspiradora con una disposición de cepillos en forma de V en el vidrio repitió el mismo truco que en el piso. Después de pasar por toda el área de vidrio, dejó que el robot con cierta dificultad, pero logró aspirar partículas pequeñas, y grandes, como trozos de papel, permanecieron debajo y arrastraron hasta el final de la limpieza. Tratemos de entender por qué sucede esto.En nuestra opinión, el problema principal es un pequeño error de cálculo constructivo, que surgió como resultado de la disposición no estándar de los cepillos principales y el contenedor de recolección de polvo, que consta de dos compartimentos (y el aire de la bomba se extrae a través de uno solo). Debido al ángulo agudo entre los rascadores en el centro, se forma un espacio justo a lo largo de la dirección del movimiento del robot, en el que caen los contaminantes grandes. Contribuya a esto y a los cepillos laterales de muy alta calidad, barriendo literalmente todo justo en esta parte central, que viene en el camino de una aspiradora. Y luego esta basura no tiene a dónde ir, ya que está bloqueada por un tercer raspador transversal, y la basura no puede filtrarse en la ranura estrecha frente a ella.
Pero la serie V inteligente y limpia sobre vidrio expuso el motivo de la sorpresa de la primera prueba. No hay absolutamente nada que agregar sobre las aspiradoras coreanas y francesas, confirmaron visualmente la calidad de su trabajo: efectivamente barren y absorben. Y en la serie V de Clever & clean vale la pena detenerse con más detalle.Un modelo de aspiradora con una disposición de cepillos en forma de V en el vidrio repitió el mismo truco que en el piso. Después de pasar por toda el área de vidrio, dejó que el robot con cierta dificultad, pero logró aspirar partículas pequeñas, y grandes, como trozos de papel, permanecieron debajo y arrastraron hasta el final de la limpieza. Tratemos de entender por qué sucede esto.En nuestra opinión, el problema principal es un pequeño error de cálculo constructivo, que surgió como resultado de la disposición no estándar de los cepillos principales y el contenedor de recolección de polvo, que consta de dos compartimentos (y el aire de la bomba se extrae a través de uno solo). Debido al ángulo agudo entre los rascadores en el centro, se forma un espacio justo a lo largo de la dirección del movimiento del robot, en el que caen los contaminantes grandes. Contribuya a esto y a los cepillos laterales de muy alta calidad, barriendo literalmente todo justo en esta parte central, que viene en el camino de una aspiradora. Y luego esta basura no tiene a dónde ir, ya que está bloqueada por un tercer raspador transversal, y la basura no puede filtrarse en la ranura estrecha frente a ella.  , , , , , .
, , , , , .  , . , «» , , , . Al final, lo que sucede está sucediendo. Si algo más masivo que el polvo o las migas se interpone en el camino del robot, entonces puede convertirse en un obstáculo que impida la absorción de polvo fino en la ranura del colector de polvo. Al mismo tiempo, debe reconocerse que al reducir el área de flujo a través de la cual se aspira el aire, se acelera el movimiento de este aire, que finalmente transporta mejor la basura liviana al contenedor. Por lo tanto, la aspiradora mostró un resultado muy similar con el robot TORNADO.Por cierto, Clever & clean también tiene una aspiradora de la serie Z con un diseño tradicional y una disposición transversal del cepillo principal en la línea del modelo. En nuestra próxima prueba de aspiradoras robóticas, definitivamente comprobaremos qué tan bien limpiará.
, . , «» , , , . Al final, lo que sucede está sucediendo. Si algo más masivo que el polvo o las migas se interpone en el camino del robot, entonces puede convertirse en un obstáculo que impida la absorción de polvo fino en la ranura del colector de polvo. Al mismo tiempo, debe reconocerse que al reducir el área de flujo a través de la cual se aspira el aire, se acelera el movimiento de este aire, que finalmente transporta mejor la basura liviana al contenedor. Por lo tanto, la aspiradora mostró un resultado muy similar con el robot TORNADO.Por cierto, Clever & clean también tiene una aspiradora de la serie Z con un diseño tradicional y una disposición transversal del cepillo principal en la línea del modelo. En nuestra próxima prueba de aspiradoras robóticas, definitivamente comprobaremos qué tan bien limpiará. CONCLUSIONES GENERALES
Bueno, para resumir en base a nuestra investigación.Primero, sacamos una conclusión general sobre la efectividad y la factibilidad de usar aspiradoras automáticas como uno de los fenómenos de los electrodomésticos. Para evaluar la contribución de la aspiradora a la limpieza del apartamento en el que funcionará, necesitamos un poco de matemática, es decir, describimos el modelo matemático de la "circulación de la suciedad" en la habitación y lo mostramos en forma gráfica.Al compilar el modelo, debe aceptar las condiciones iniciales. Tómelos lo más cerca posible de lo real y lo más común.1. Como regla general, limpiamos el fin de semana y, muy probablemente, la mayoría de los lectores limpian sus apartamentos y casas cada fin de semana, por lo que el período entre la limpieza es de 7 días.2. Para simplificar la visualización, suponemos que todos los días durante la vida normal en condiciones naturales, nuevos 10 gramos de polvo caen al suelo y se distribuyen de manera uniforme por toda la habitación. Enfatizo que al construir leyes generales, es importante no la cantidad específica de polvo (son diferentes para todos), sino las proporciones relativas que muestran el efecto del uso del robot, por lo que condicionalmente tomaremos un aumento diario de polvo de 10 g.3.La aspiradora funcionará diariamente durante toda la semana. Al mismo tiempo, suponga que antes de su primer lanzamiento, el piso está completamente limpio y no tiene polvo.Considere el principio de compilar un modelo utilizando el ejemplo del personaje principal de nuestra prueba: TORNADO. Posteriormente, construimos diagramas para todos los participantes en las pruebas. Según las condiciones aceptadas, tendremos que el primer día que aparecieron 10 g de polvo y el robot aspirador lo recogió dentro de su indicador de eficiencia integral (44.8%), la cantidad de polvo restante en el piso se puede determinar mediante la fórmula:G1 = (1 -Kief) x G diariamente = (1-0.448) x 10 = 5.52 g. Enconsecuencia, al día siguiente, el volumen diario se agregará al polvo que queda después de la limpieza de ayer y todo esto será eliminado por el robot nuevamente dentro de sus capacidades. En total, después del segundo día, el polvo permanecerá en la siguiente cantidad:Gd2 = (1-Kief) x (Gd1 + G diariamente) = (1-0.448) x (5.52 + 10) = 8.57 g.Para los días restantes de la semana:Gd3 = (1-Kief) x (Gd2 + G diariamente) = (1-0.448) x (8.57 + 10) = 10.25 g.;Gd4 = (1-Kief) x (Gd3 + G diariamente) = (1-0.448) x (10.25 + 10) = 11.18 g.Gd5 = (1-Kief) x (Gd4 + G diariamente) = (1-0.448) x (11.18 + 10) = 11.69 g.Gd6 = (1-Kief) x (Gd5 + G diariamente) = (1-0.448) x (11.69 + 10) = 11.97 g.Gd7 = (1-Kief) x (Gd6 + G diariamente) = (1-0.448) x (11.97 + 10) = 12.13 g.Para otros participantes en la prueba, la situación es la siguiente.Trabajando en modo secuencial, Iclebo dejará 9.8 g de contaminantes durante toda la semana, en modo caótico durante aproximadamente 5 g, y la serie V Clever & clean no eliminará 23.13 g en una semana.Resulta un resultado muy interesante. Si no se usa la aspiradora robot, entonces, por supuesto, con una adición diaria de 10 g, habrá 70 g de polvo en la habitación al final de la semana. Si usa una aspiradora robot TORNADO todos los días, después de 7 días habrá solo 12.13 g de polvo, ¡lo que es exactamente 5.8 veces menos! Y si es en porcentaje, entonces en una semana el robot recogerá casi el 83% de todo el polvo que ha aparecido. Y la aspiradora Iclebo que mostró el mejor resultado logrará absorber casi el 93% de todo lo que se deposita en el piso en forma de polvo en siete días, es decir. Será 14 veces más pequeño (!).Hay razones para pensar. Después de todo, al movernos por el departamento, levantamos el polvo con los pies en el aire y posteriormente lo respiramos durante los días en que no se limpian las instalaciones. E inhalarlo no es muy útil. Para comprender esto, simplemente escriba la consulta "composición del polvo doméstico" en cualquier sistema de búsqueda en Internet y lea los materiales de investigación de los científicos sobre este tema.Para mayor claridad, en base a los resultados obtenidos, construiremos un diagrama general que tenga en cuenta los resultados de todos los participantes de la prueba.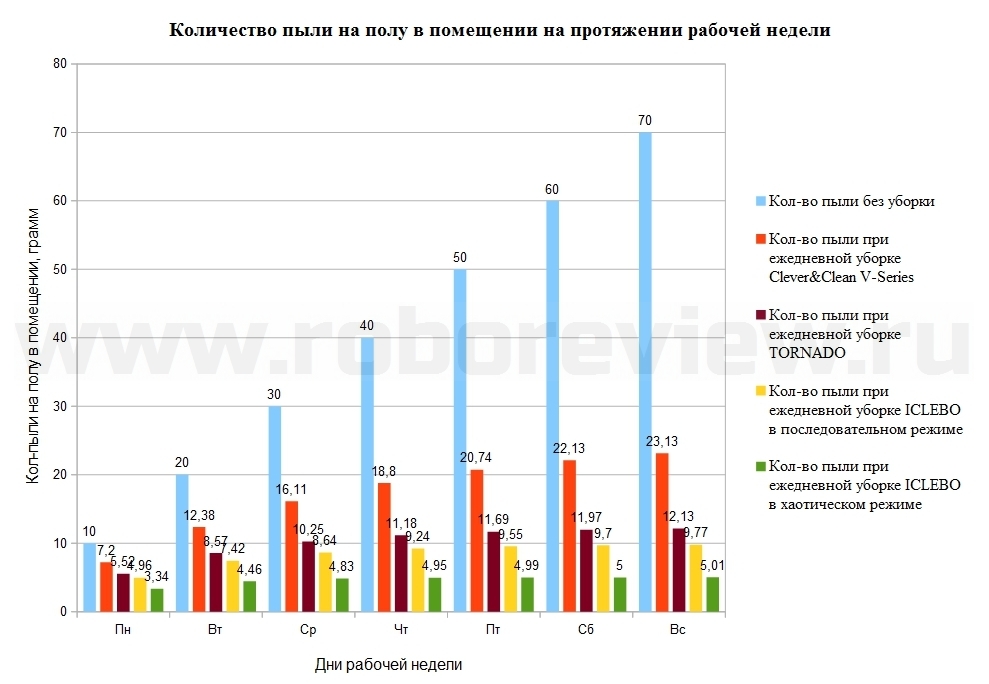 No puedo evitar hacer un pequeño comentario sobre los resultados del robot coreano en modos secuenciales y caóticos. Según los resultados de nuestra investigación, resultó que el régimen caótico resultó ser mejor que el secuencial en términos de pureza. Sin embargo, esto es cierto para nuestras condiciones específicas: cuatro habitaciones con un área de 25, 10, 13 y 15 metros cuadrados. Un régimen caótico se caracteriza por estar subordinado a la teoría de la probabilidad. La complejidad de los algoritmos de control elimina en cierta medida los riesgos de no visitar un lugar, pero siempre existe la posibilidad. Durante la prueba, la aspiradora no entró en la habitación más pequeña (10 m2), lo que dio el resultado final de recubrimiento del 83%. En las habitaciones restantes, recogió todos los marcadores. Pero en el próximo ciclo de limpieza, podría no haber llamado a una habitación grande, entonces el resultado hubiera sido peor. Por lo tanto, todo depende del área de las instalaciones.Si las áreas son grandes y hay varias habitaciones, entonces el modo caótico puede ser notablemente menos efectivo que el secuencial, lo que garantiza una orientación mucho más segura de la aspiradora, lo que contribuye a una "cobertura" más completa durante la limpieza.Ahora, teniendo los datos obtenidos en el proceso de nuestra investigación, podemos responder objetivamente las preguntas formuladas al comienzo de este artículo.¿Es una aspiradora robot una "escoba eléctrica" o una aspiradora real?Con base en el análisis de las estructuras, podemos concluir que, por supuesto, hay algunas características de una escoba eléctrica, pero sin embargo, estos robots aspiran y acumulan muy bien el polvo. En primer lugar, el resultado final es importante, y bajo ciertas condiciones puede ser comparable con el resultado logrado con una aspiradora potente convencional. ¿Limpia en todas partes o deja grandes áreas sin limpiar?La respuesta a esta pregunta está bien ilustrada por nuestra prueba número 2. Aquí, mucho depende del sistema de navegación del robot. Cuanto más perfecto sea, más pequeña será el área sin limpiar., ?. - , - . , 70 95 % , . , , .?, . , , — .?, . - , . . , , — . , 70-90% , , , . Esperamos que después de leer las conclusiones generales, ya haya disipado las dudas sobre los beneficios de un limpiador automático y la necesidad de tener uno en cada hogar. Sin embargo, la pregunta sigue siendo "¿qué comprar"?Si elige entre nuestros participantes en la prueba, la opción más indiscutible es el modelo Iclebo Arte del fabricante coreano. El segundo en las recomendaciones, como se puede adivinar, es el TORNADO francés. Y el robot inteligente y limpio de la serie V cierra los tres primeros con los indicadores más modestos de eficiencia de limpieza. Sin embargo, un punto importante es el costo del dispositivo en las tiendas. Y si calcula el costo unitario de la unidad de eficiencia de la serie V, resulta que parece una compra muy razonable. No es tan peor como es más barato: la diferencia de precio en comparación con Arte es casi doble.En general, la elección de cualquier dispositivo de alta tecnología siempre es difícil y está determinada por muchos factores. Por lo tanto, daré una serie de consideraciones con respecto a la eficiencia del dispositivo, dependiendo de las características de diseño. Estos son esencialmente los resultados de la batalla de conceptos expresada al comienzo del artículo.
No puedo evitar hacer un pequeño comentario sobre los resultados del robot coreano en modos secuenciales y caóticos. Según los resultados de nuestra investigación, resultó que el régimen caótico resultó ser mejor que el secuencial en términos de pureza. Sin embargo, esto es cierto para nuestras condiciones específicas: cuatro habitaciones con un área de 25, 10, 13 y 15 metros cuadrados. Un régimen caótico se caracteriza por estar subordinado a la teoría de la probabilidad. La complejidad de los algoritmos de control elimina en cierta medida los riesgos de no visitar un lugar, pero siempre existe la posibilidad. Durante la prueba, la aspiradora no entró en la habitación más pequeña (10 m2), lo que dio el resultado final de recubrimiento del 83%. En las habitaciones restantes, recogió todos los marcadores. Pero en el próximo ciclo de limpieza, podría no haber llamado a una habitación grande, entonces el resultado hubiera sido peor. Por lo tanto, todo depende del área de las instalaciones.Si las áreas son grandes y hay varias habitaciones, entonces el modo caótico puede ser notablemente menos efectivo que el secuencial, lo que garantiza una orientación mucho más segura de la aspiradora, lo que contribuye a una "cobertura" más completa durante la limpieza.Ahora, teniendo los datos obtenidos en el proceso de nuestra investigación, podemos responder objetivamente las preguntas formuladas al comienzo de este artículo.¿Es una aspiradora robot una "escoba eléctrica" o una aspiradora real?Con base en el análisis de las estructuras, podemos concluir que, por supuesto, hay algunas características de una escoba eléctrica, pero sin embargo, estos robots aspiran y acumulan muy bien el polvo. En primer lugar, el resultado final es importante, y bajo ciertas condiciones puede ser comparable con el resultado logrado con una aspiradora potente convencional. ¿Limpia en todas partes o deja grandes áreas sin limpiar?La respuesta a esta pregunta está bien ilustrada por nuestra prueba número 2. Aquí, mucho depende del sistema de navegación del robot. Cuanto más perfecto sea, más pequeña será el área sin limpiar., ?. - , - . , 70 95 % , . , , .?, . , , — .?, . - , . . , , — . , 70-90% , , , . Esperamos que después de leer las conclusiones generales, ya haya disipado las dudas sobre los beneficios de un limpiador automático y la necesidad de tener uno en cada hogar. Sin embargo, la pregunta sigue siendo "¿qué comprar"?Si elige entre nuestros participantes en la prueba, la opción más indiscutible es el modelo Iclebo Arte del fabricante coreano. El segundo en las recomendaciones, como se puede adivinar, es el TORNADO francés. Y el robot inteligente y limpio de la serie V cierra los tres primeros con los indicadores más modestos de eficiencia de limpieza. Sin embargo, un punto importante es el costo del dispositivo en las tiendas. Y si calcula el costo unitario de la unidad de eficiencia de la serie V, resulta que parece una compra muy razonable. No es tan peor como es más barato: la diferencia de precio en comparación con Arte es casi doble.En general, la elección de cualquier dispositivo de alta tecnología siempre es difícil y está determinada por muchos factores. Por lo tanto, daré una serie de consideraciones con respecto a la eficiencia del dispositivo, dependiendo de las características de diseño. Estos son esencialmente los resultados de la batalla de conceptos expresada al comienzo del artículo.- Los dispositivos con el cepillo principal ubicado perpendicular a la línea de dirección de movimiento tienen la mejor eficiencia. Cualquier experimento con la disposición angular de los cepillos reducirá la cantidad de polvo recolectado.
- Es deseable que el aire de la bomba de succión de polvo pase a través del cepillo principal; esto contribuye a una mejor recolección de polvo.
- Un cepillo principal adicional no siempre brinda una ventaja en términos de la cantidad de polvo recolectado, sin embargo, complica significativamente el diseño.
- , , , .
- , . , Ni-Mh , , Li-ion, .
- Se prefieren aquellos modelos que permiten programar un programa de limpieza. Esta función simplifica al máximo el diálogo del propietario con el dispositivo y, sin esfuerzos adicionales, garantiza el funcionamiento diario de sus robots, lo que garantiza la divulgación del potencial total de la aspiradora robot para limpiar las áreas que se le confían.
Y luego, de todos modos, elija a nuestros queridos lectores, en función de las preferencias de sabor, la mayor eficiencia del dispositivo y sus capacidades materiales. Source: https://habr.com/ru/post/es388155/
All Articles