Interferencia en los sistemas mundiales de navegación por satélite. Continuación
Para mi sorpresa, el artículo anterior fue recibido calurosamente. Hoy continuamos considerando este tema. Medidas contra interferenciasEn la navegación, el nivel de ruido siempre supera el nivel de señal. Para determinar el nivel de interferencia (relación interferencia / señal, relación J / S), se considera cuánto excede el ruido el nivel de ruido. Los siguientes son métodos para aumentar la inmunidad al ruido de los receptores, junto con la máxima interferencia contra la cual estos métodos son efectivos.
Medidas contra interferenciasEn la navegación, el nivel de ruido siempre supera el nivel de señal. Para determinar el nivel de interferencia (relación interferencia / señal, relación J / S), se considera cuánto excede el ruido el nivel de ruido. Los siguientes son métodos para aumentar la inmunidad al ruido de los receptores, junto con la máxima interferencia contra la cual estos métodos son efectivos. 1. El aumento en el ancho de banda de la señal (hasta 10 dB);2. Aumento de la potencia del transmisor en la nave espacial (hasta 20 dB);3. Integración de receptores de navegación (hasta 30 dB);4. El uso de filtros de hardware digital (hasta 40 dB);5. El uso de corrección de frecuencia de tiempo (hasta 50 dB);6. Uso de métodos de antena (hasta 70 dB);Los dos primeros métodos dependen de la señal utilizada por la nave espacial y no se pueden cambiar desde la Tierra después del lanzamiento. Los métodos de antena complican mucho y aumentan el costo de los equipos de consumo, lo que reduce drásticamente el posible rango de usuarios.
1. El aumento en el ancho de banda de la señal (hasta 10 dB);2. Aumento de la potencia del transmisor en la nave espacial (hasta 20 dB);3. Integración de receptores de navegación (hasta 30 dB);4. El uso de filtros de hardware digital (hasta 40 dB);5. El uso de corrección de frecuencia de tiempo (hasta 50 dB);6. Uso de métodos de antena (hasta 70 dB);Los dos primeros métodos dependen de la señal utilizada por la nave espacial y no se pueden cambiar desde la Tierra después del lanzamiento. Los métodos de antena complican mucho y aumentan el costo de los equipos de consumo, lo que reduce drásticamente el posible rango de usuarios. La integración de los receptores de navegación no aumenta significativamente la inmunidad al ruido del receptor de navegación. Esto se debe al hecho de que los sistemas de navegación inercial (ANN) no se ven afectados por la interferencia de radio y tienen una alta precisión de medición a corto plazo. Sin embargo, el error al determinar los parámetros de navegación se acumula con el tiempo y requiere corrección del GNSS. El diagrama anterior muestra dónde, con el filtro de Kalman, se integra el receptor de navegación.El uso de la corrección de frecuencia de tiempo (supresión de interferencia en el dominio de frecuencia) es un método eficaz, pero es muy difícil de implementar en tiempo real. Esto se debe a que la ejecución de este método debe llevarse a cabo utilizando un microordenador en paralelo con la operación de seguir bucles, discriminadores, resolver problemas de navegación y velocidad y resolver ambigüedades cuando se trabaja en modo RTK. En base a esto, para poder suprimir la interferencia en el dominio de la frecuencia, es necesario tener una reserva significativa de potencia informática que no se vea involucrada en ausencia de interferencia.Se distinguen dos categorías entre los filtros digitales:1. Filtros recursivos (con respuesta de impulso infinita);2. Filtros no recursivos (con respuesta de impulso finita).Que elegirLa cuestión de elección depende en gran medida del hardware disponible. Óptimos en términos de complejidad de implementación y costo del dispositivo final son los filtros digitales. En los receptores de navegación puede encontrar filtros IIR y FIR. Los filtros FIR tienen la ventaja de poder crear un filtro con una respuesta de fase lineal y, como resultado, un retraso de grupo constante. Esto significa que diferentes componentes de frecuencia se retrasarán por el mismo número de ciclos de reloj al pasar por el filtro. Sin embargo, usando un filtro IIR, se puede lograr una ventana de muesca mucho más estrecha y una banda de transición generalmente más pequeña con el mismo orden de filtro.Como funcionaPara que los algoritmos de supresión de interferencia funcionen, se necesita información sobre el entorno de interferencia. La detección de interferencia de banda estrecha se realiza convenientemente en el dominio de la frecuencia, mientras que el comportamiento de los pseudo retardos, el potencial de energía y el sesgo Doppler para detectar la presencia de saltos debe analizarse para detectar ataques de suplantación de identidad.
La integración de los receptores de navegación no aumenta significativamente la inmunidad al ruido del receptor de navegación. Esto se debe al hecho de que los sistemas de navegación inercial (ANN) no se ven afectados por la interferencia de radio y tienen una alta precisión de medición a corto plazo. Sin embargo, el error al determinar los parámetros de navegación se acumula con el tiempo y requiere corrección del GNSS. El diagrama anterior muestra dónde, con el filtro de Kalman, se integra el receptor de navegación.El uso de la corrección de frecuencia de tiempo (supresión de interferencia en el dominio de frecuencia) es un método eficaz, pero es muy difícil de implementar en tiempo real. Esto se debe a que la ejecución de este método debe llevarse a cabo utilizando un microordenador en paralelo con la operación de seguir bucles, discriminadores, resolver problemas de navegación y velocidad y resolver ambigüedades cuando se trabaja en modo RTK. En base a esto, para poder suprimir la interferencia en el dominio de la frecuencia, es necesario tener una reserva significativa de potencia informática que no se vea involucrada en ausencia de interferencia.Se distinguen dos categorías entre los filtros digitales:1. Filtros recursivos (con respuesta de impulso infinita);2. Filtros no recursivos (con respuesta de impulso finita).Que elegirLa cuestión de elección depende en gran medida del hardware disponible. Óptimos en términos de complejidad de implementación y costo del dispositivo final son los filtros digitales. En los receptores de navegación puede encontrar filtros IIR y FIR. Los filtros FIR tienen la ventaja de poder crear un filtro con una respuesta de fase lineal y, como resultado, un retraso de grupo constante. Esto significa que diferentes componentes de frecuencia se retrasarán por el mismo número de ciclos de reloj al pasar por el filtro. Sin embargo, usando un filtro IIR, se puede lograr una ventana de muesca mucho más estrecha y una banda de transición generalmente más pequeña con el mismo orden de filtro.Como funcionaPara que los algoritmos de supresión de interferencia funcionen, se necesita información sobre el entorno de interferencia. La detección de interferencia de banda estrecha se realiza convenientemente en el dominio de la frecuencia, mientras que el comportamiento de los pseudo retardos, el potencial de energía y el sesgo Doppler para detectar la presencia de saltos debe analizarse para detectar ataques de suplantación de identidad. Para detectar interferencia, las funciones de la ventana deben usarse en conexión con el llamado fenómeno de propagación del espectro. Debido al hecho de que los bloqueadores pueden ubicarse a diferentes distancias del receptor, la interferencia tendrá diferentes niveles. Sin el uso de funciones de ventana, los lóbulos laterales de una ventana rectangular pueden enmascarar alguna interferencia, no detectada ni compensada.Unas palabras sobre mi desarrollo
Para detectar interferencia, las funciones de la ventana deben usarse en conexión con el llamado fenómeno de propagación del espectro. Debido al hecho de que los bloqueadores pueden ubicarse a diferentes distancias del receptor, la interferencia tendrá diferentes niveles. Sin el uso de funciones de ventana, los lóbulos laterales de una ventana rectangular pueden enmascarar alguna interferencia, no detectada ni compensada.Unas palabras sobre mi desarrollo Mi tarea consistía en desarrollar un supresor en la estructura existente del receptor de navegación basado en el VLSI 18791 fabricado por el "Módulo" del Centro Científico y Técnico. Si hablamos brevemente sobre esta plataforma de hardware y software, podemos distinguir:1. 4 ADC de 12 bits con una frecuencia de muestreo de 81,92 MHz;2. El núcleo de ARM1176;3. 2 núcleos NeuroMatrix DSP con un multiplicador de matriz de vectores capaz de paralelizar con éxito las operaciones con valores de bits bajos;4. Unidad de preprocesamiento de señal de hardware (BPOS).
Mi tarea consistía en desarrollar un supresor en la estructura existente del receptor de navegación basado en el VLSI 18791 fabricado por el "Módulo" del Centro Científico y Técnico. Si hablamos brevemente sobre esta plataforma de hardware y software, podemos distinguir:1. 4 ADC de 12 bits con una frecuencia de muestreo de 81,92 MHz;2. El núcleo de ARM1176;3. 2 núcleos NeuroMatrix DSP con un multiplicador de matriz de vectores capaz de paralelizar con éxito las operaciones con valores de bits bajos;4. Unidad de preprocesamiento de señal de hardware (BPOS).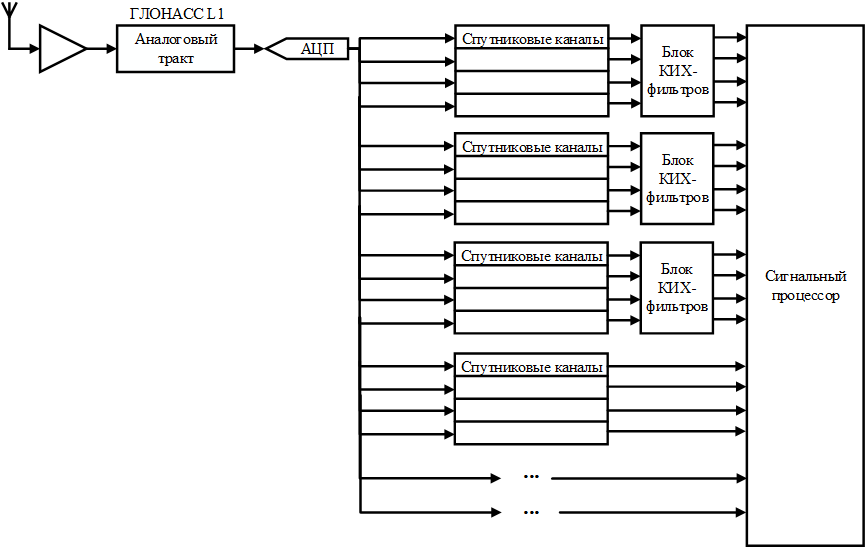 El resto de los detalles se pueden encontrar en el sitio, ahora prestaremos más atención a BPOS. El circuito receptor general se da arriba. Contiene una antena, una ruta analógica (por ejemplo, GLONASS L1, pero ahora no importa), un ADC, canales digitales y un procesador de señal. BPOS contiene 24 canales digitales, 12 de los cuales tienen acceso a tres bloques de filtros FIR. Cada bloque contiene 4 filtros FIR de 64º orden con coeficientes de 8 bits. Dentro de una unidad, los filtros se pueden cambiar en serie o en paralelo para implementar de uno a cuatro supresores. Los canales digitales contienen un oscilador local digital, filtro de paso bajo, un decimador (para reducir la frecuencia de muestreo), así como un normalizador. En el procesador de señal (NeuroMatrix, no ARM), los algoritmos para detectar interferencia, calcular los coeficientes de los filtros de hardware,Procesamiento de correlación y bucles de seguimiento (FAP y CVD).Utilizando un filtro de orden 128 con coeficientes de 16 bits, el receptor pudo lograr la operatividad bajo la influencia de una interferencia de banda estrecha con una potencia de 67 dB ubicada en el lóbulo principal del espectro de la señal.Estaré encantado de responder preguntas en los comentarios o, si hay un número significativo de ellos, escribiré la tercera parte del artículo. Gracias por su atención.Una pequeña actualización.Olvidé completamente traer dos de las imágenes más interesantes. El siguiente es el espectro de la señal de navegación en presencia de interferencia de banda estrecha antes y después de pasar a través del filtro desarrollado:
El resto de los detalles se pueden encontrar en el sitio, ahora prestaremos más atención a BPOS. El circuito receptor general se da arriba. Contiene una antena, una ruta analógica (por ejemplo, GLONASS L1, pero ahora no importa), un ADC, canales digitales y un procesador de señal. BPOS contiene 24 canales digitales, 12 de los cuales tienen acceso a tres bloques de filtros FIR. Cada bloque contiene 4 filtros FIR de 64º orden con coeficientes de 8 bits. Dentro de una unidad, los filtros se pueden cambiar en serie o en paralelo para implementar de uno a cuatro supresores. Los canales digitales contienen un oscilador local digital, filtro de paso bajo, un decimador (para reducir la frecuencia de muestreo), así como un normalizador. En el procesador de señal (NeuroMatrix, no ARM), los algoritmos para detectar interferencia, calcular los coeficientes de los filtros de hardware,Procesamiento de correlación y bucles de seguimiento (FAP y CVD).Utilizando un filtro de orden 128 con coeficientes de 16 bits, el receptor pudo lograr la operatividad bajo la influencia de una interferencia de banda estrecha con una potencia de 67 dB ubicada en el lóbulo principal del espectro de la señal.Estaré encantado de responder preguntas en los comentarios o, si hay un número significativo de ellos, escribiré la tercera parte del artículo. Gracias por su atención.Una pequeña actualización.Olvidé completamente traer dos de las imágenes más interesantes. El siguiente es el espectro de la señal de navegación en presencia de interferencia de banda estrecha antes y después de pasar a través del filtro desarrollado: así como la salida del filtro adaptado para estos espectros:
así como la salida del filtro adaptado para estos espectros: Como puede ver, en presencia de interferencia de banda estrecha, el pico de correlación no se puede distinguir en la salida del correlacionador.También se debe tener en cuenta que el filtro tiene una característica, a saber, el retraso del grupo de inserción igual a la mitad del tamaño del filtro. Este valor se tiene en cuenta en la solución posterior del problema de navegación y, por lo tanto, se compensa por completo.
Como puede ver, en presencia de interferencia de banda estrecha, el pico de correlación no se puede distinguir en la salida del correlacionador.También se debe tener en cuenta que el filtro tiene una característica, a saber, el retraso del grupo de inserción igual a la mitad del tamaño del filtro. Este valor se tiene en cuenta en la solución posterior del problema de navegación y, por lo tanto, se compensa por completo. Source: https://habr.com/ru/post/es389203/
All Articles