Control vectorial para motor de dedos asíncronos
 En el artículo anterior, "Control vectorial del motor eléctrico" en los dedos " , se consideró un sistema de control vectorial para motores síncronos. El artículo resultó ser grande, por lo que la pregunta sobre los motores de inducción se publicó en una publicación separada. Este artículo es una continuación del anterior y se basa en las explicaciones de los principios de operación de motores eléctricos que se dan allí. Hablará sobre las características del motor asíncrono en relación con el control vectorial, y también mostrará las diferencias en la estructura del sistema de control vectorial entre máquinas síncronas y asíncronas.¿Cómo funciona un motor de inducción? La explicación más popular dice algo así como "el estator crea un campo magnético giratorio que induce un EMF en el rotor, lo que hace que las corrientes fluyan allí, como resultado, el rotor es arrastrado por el campo del estator y comienza a girar". Personalmente, a partir de tal explicación, no empiezo a comprender toda la física del proceso, así que vamos a explicarlo de manera diferente, "en los dedos".¿Aún viste un video de cómo un imán interactúa con un cilindro de cobre? Preste especial atención al rango de tiempo de 0:49 a 1:03: este es un motor asíncrono real:El efecto se debe a la aparición de corrientes parásitas en el cilindro. De acuerdo con la ley de inducción electromagnética , descubierta por Michael Faraday, cuando cambia el flujo magnético de un circuito cerrado, aparece un EMF en él (simplemente suponga que el voltaje). Este EMF, como se aplica a un cilindro de cobre, causa inmediatamente que aparezca una corriente en el cilindro. Al mismo tiempo, esta corriente también crea su propio flujo magnético de respuesta dirigido exactamente en la dirección opuesta al cambio en el flujo del imán que traemos:la corriente de inducción que surge en un circuito conductor cerrado tiene tal dirección que el campo magnético creado por ella contrarresta ese cambio en el flujo magnético, que causó esta corriente.Esto se puede entender para que el circuito cerrado resista el cambio en el flujo magnético dentro de sí mismo. Si lleva bruscamente el imán al cilindro de cobre, es decir haga un cambio brusco en el flujo magnético, luego las corrientes de respuesta fluirán en el cilindro para que el campo magnético dentro del cilindro en el primer momento sea cero: el campo magnético del imán levantado será compensado completamente por el campo magnético de las corrientes del cilindro (con supuestos, por supuesto). Si sostiene y sostiene el imán, entonces las corrientes en el cilindro disminuirán gradualmente debido a la presencia de resistencia de cobre, y el campo del cilindro creado por sus corrientes desaparecerá: el flujo magnético del imán permanente "explotará" en el cilindro, como si no hubiera cilindro. Pero vale la pena intentar quitar el imán,cómo reaccionará nuevamente el cilindro: ahora intentará "recrear" el flujo magnético perdido dentro de sí mismo, es decir resistirá nuevamente un cambio en el flujo magnético, en este caso, su desaparición. Pero, ¿qué significa recrear el flujo magnético? Esto significa que durante algún tiempo un cilindro de cobre puede considerarse convencionalmente un "imán permanente": una corriente parásita circula en él, creando un campo magnético (los superconductores en un campo magnético "cuelgan" con el mismo principio, pero esta es una historia completamente diferente).pero esta es una historia completamente diferente).pero esta es una historia completamente diferente).Pasemos ahora al diseño de un motor de inducción. El rotor de un motor de inducción se puede imaginar condicionalmente también en forma de cilindro de cobre. Pero en construcciones reales, esta es una cierta red en forma de "jaula de ardilla" (Figura 1) hecha de cobre o aluminio, combinada con un circuito magnético (hierro forrado).Figura 1. El rotor de un motor de inducción de tipo jaula de ardilla con corriente en uno de los "marcos" de jaula de ardilla que responde a un aumento en un campo magnético externo.La figura muestra esquemáticamente el flujo de corriente en uno de los "cuadros", es decir en algunas barras de una jaula de ardilla, si traes un imán desde arriba (crea una corriente en el estator). De hecho, la corriente en este caso fluye en todas las barras, excepto, condicionalmente, las barras superior e inferior, para las cuales no hay cambio en el flujo (pero reaccionarían a un imán presentado horizontalmente).Recuerda desde el principio del último artículo.Una imagen con una ilustración esquemática de una máquina síncrona de dos fases, ¿dónde estaba el imán del rotor? Ahora hagamos un motor de inducción: en lugar de un imán, colocaremos dos bobinas perpendiculares en cortocircuito, que simbolizan el cilindro de cobre del rotor (Figura 2).Figura 2. Representación esquemática de un motor de inducción de jaula de ardilla de dos fases.Reemplazar un cilindro con dos bobinas para explicar el principio de operación (o modelado) es correcto, así como es correcto reemplazar un devanado trifásico por uno bifásico. Solo en este caso reemplazamos ... el "devanado de fase infinita" del cilindro (un número infinito de cuadros) con dos bobinas con inductancia y resistencia equivalentes. Después de todo, dos bobinas pueden crear exactamente el mismo vector de corriente y flujo magnético que un cilindro.Y ahora aprovechemos un breve tiempo de una máquina asíncrona sincrónica. Alimentamos el eje β en la bobinacorriente continua y espere dos o tres segundos hasta que las corrientes de respuesta dejen de fluir en el rotor: "traeremos un imán externo". Es decir, esperamos que las corrientes caigan en el rotor para que el campo magnético del estator "atraviese el rotor" y nadie interfiera con él. ¿Qué pasará ahora si apaga la corriente en el estator? Así es, durante los mismos dos o tres segundos, mientras que la corriente del rotor se opone a esto, obtendremos un "imán ordinario" del rotor (Figura 3).Figura 3. Motor asíncrono, cuando la corriente continua en la fase β se acaba de apagar, la corriente fluye en el rotor i rd .Que estamos esperando Más rápido, hasta que el imán desaparezca, dibujamos a lo largo del eje d familiar (como en una máquina síncrona) y el eje q perpendicular a él , unido al rotor. Activamos la estructura del control vectorial de la máquina síncrona, aplicamos corriente a lo largo del eje q , creando un momento, ¡vamos!Entonces, incluso puedes hacer algunas revoluciones hasta que nuestro imán de azúcar se haya derretido y el eje dNo ha ido al olvido. Que hacer ¡No apaguemos la corriente a lo largo del eje d, alimentando nuestro imán! Y nuevamente, guardemos la estructura de control vectorial de la máquina síncrona, simplemente enviando la tarea a lo largo del eje d (anteriormente había cero). Entonces, miramos la Figura 4: los ejes d , q están "unidos" al rotor por el sensor de posición, el motor está parado, se suministra la corriente a lo largo del eje d en el estator, que en este caso coincide con el eje β para una máquina de pie . No hay corriente a lo largo del eje q : esperamos hasta que el rotor se "magnetice". ¡Y ahora alimentamos la corriente i sq (s - stator)! Vamos!Figura 4. Aplicamos corriente al eje d , magnetizando la máquina, preparando todo para suministrar corriente al eje del estator q .¿Hasta dónde llegaremos con este método del barón Munchausen? Lamentablemente no. Vea lo que sucedió (Figura 5):Figura 5. ¡Se ha resbalado un imán!El motor comenzó a girar, pero un tiempo después de que aplicamos corriente al eje q , formando la corriente total i sy "clavamos" este vector en la posición del rotor, el imán en el rotor se "movió". Y se situó exactamente a lo largo del vector i s . El rotor no comprende dónde dibujamos los ejes d , q ... No le importa si estaba girando o no. Es importante que su "imán inducido" interno finalmente quiera codirigirse con el flujo magnético del estator, para "obedecer" el flujo externo. Debido al imán que se ha movido hacia afuera, el motor dejará de girar: no solo eso, entre el imán del rotor y la corriente i q no hay 90 grados deseados, también hay una corriente del ejed ahora lo tira en la dirección opuesta, compensando el momento creado por la corriente i q . El método del barón Munchausen falló.¿Qué hacer con un escurridizo imán de rotor? Y hagamos que la estructura de control vectorial del motor de inducción no se encuentre en los ejes d , q unidos al rotor, sino en otros ejes unidos exactamente a la posición actual del "imán del rotor": llamémoslos ejes x , y para distinguirlos de d , q. Según el "científico", estos son ejes orientados a lo largo del enlace de flujo del rotor. Pero, ¿cómo saber exactamente dónde está ahora el enlace de flujo del rotor, es decir? ¿Dónde se gira el imán en el rotor? Su posición depende ... en primer lugar, de la posición del rotor en sí (tenemos un sensor de posición, bueno), en segundo lugar, de las corrientes del estator (creando una corriente del estator, que el imán del rotor finalmente girará), y en tercer lugar de los parámetros de la cadena del rotor: la inductancia y resistencia del "cilindro de cobre" (es una jaula de ardilla, es el devanado del rotor, es la cadena del rotor). Por lo tanto ... sabiendo todo esto, la posición del "imán" del rotor puede calcularse simplemente usando varias ecuaciones diferenciales. Esto se realiza mediante el denominado observador de enlace de flujo del rotor, resaltado en color en el diagrama estructural final del control vectorial de un motor asíncrono (Figura 6).
En el artículo anterior, "Control vectorial del motor eléctrico" en los dedos " , se consideró un sistema de control vectorial para motores síncronos. El artículo resultó ser grande, por lo que la pregunta sobre los motores de inducción se publicó en una publicación separada. Este artículo es una continuación del anterior y se basa en las explicaciones de los principios de operación de motores eléctricos que se dan allí. Hablará sobre las características del motor asíncrono en relación con el control vectorial, y también mostrará las diferencias en la estructura del sistema de control vectorial entre máquinas síncronas y asíncronas.¿Cómo funciona un motor de inducción? La explicación más popular dice algo así como "el estator crea un campo magnético giratorio que induce un EMF en el rotor, lo que hace que las corrientes fluyan allí, como resultado, el rotor es arrastrado por el campo del estator y comienza a girar". Personalmente, a partir de tal explicación, no empiezo a comprender toda la física del proceso, así que vamos a explicarlo de manera diferente, "en los dedos".¿Aún viste un video de cómo un imán interactúa con un cilindro de cobre? Preste especial atención al rango de tiempo de 0:49 a 1:03: este es un motor asíncrono real:El efecto se debe a la aparición de corrientes parásitas en el cilindro. De acuerdo con la ley de inducción electromagnética , descubierta por Michael Faraday, cuando cambia el flujo magnético de un circuito cerrado, aparece un EMF en él (simplemente suponga que el voltaje). Este EMF, como se aplica a un cilindro de cobre, causa inmediatamente que aparezca una corriente en el cilindro. Al mismo tiempo, esta corriente también crea su propio flujo magnético de respuesta dirigido exactamente en la dirección opuesta al cambio en el flujo del imán que traemos:la corriente de inducción que surge en un circuito conductor cerrado tiene tal dirección que el campo magnético creado por ella contrarresta ese cambio en el flujo magnético, que causó esta corriente.Esto se puede entender para que el circuito cerrado resista el cambio en el flujo magnético dentro de sí mismo. Si lleva bruscamente el imán al cilindro de cobre, es decir haga un cambio brusco en el flujo magnético, luego las corrientes de respuesta fluirán en el cilindro para que el campo magnético dentro del cilindro en el primer momento sea cero: el campo magnético del imán levantado será compensado completamente por el campo magnético de las corrientes del cilindro (con supuestos, por supuesto). Si sostiene y sostiene el imán, entonces las corrientes en el cilindro disminuirán gradualmente debido a la presencia de resistencia de cobre, y el campo del cilindro creado por sus corrientes desaparecerá: el flujo magnético del imán permanente "explotará" en el cilindro, como si no hubiera cilindro. Pero vale la pena intentar quitar el imán,cómo reaccionará nuevamente el cilindro: ahora intentará "recrear" el flujo magnético perdido dentro de sí mismo, es decir resistirá nuevamente un cambio en el flujo magnético, en este caso, su desaparición. Pero, ¿qué significa recrear el flujo magnético? Esto significa que durante algún tiempo un cilindro de cobre puede considerarse convencionalmente un "imán permanente": una corriente parásita circula en él, creando un campo magnético (los superconductores en un campo magnético "cuelgan" con el mismo principio, pero esta es una historia completamente diferente).pero esta es una historia completamente diferente).pero esta es una historia completamente diferente).Pasemos ahora al diseño de un motor de inducción. El rotor de un motor de inducción se puede imaginar condicionalmente también en forma de cilindro de cobre. Pero en construcciones reales, esta es una cierta red en forma de "jaula de ardilla" (Figura 1) hecha de cobre o aluminio, combinada con un circuito magnético (hierro forrado).Figura 1. El rotor de un motor de inducción de tipo jaula de ardilla con corriente en uno de los "marcos" de jaula de ardilla que responde a un aumento en un campo magnético externo.La figura muestra esquemáticamente el flujo de corriente en uno de los "cuadros", es decir en algunas barras de una jaula de ardilla, si traes un imán desde arriba (crea una corriente en el estator). De hecho, la corriente en este caso fluye en todas las barras, excepto, condicionalmente, las barras superior e inferior, para las cuales no hay cambio en el flujo (pero reaccionarían a un imán presentado horizontalmente).Recuerda desde el principio del último artículo.Una imagen con una ilustración esquemática de una máquina síncrona de dos fases, ¿dónde estaba el imán del rotor? Ahora hagamos un motor de inducción: en lugar de un imán, colocaremos dos bobinas perpendiculares en cortocircuito, que simbolizan el cilindro de cobre del rotor (Figura 2).Figura 2. Representación esquemática de un motor de inducción de jaula de ardilla de dos fases.Reemplazar un cilindro con dos bobinas para explicar el principio de operación (o modelado) es correcto, así como es correcto reemplazar un devanado trifásico por uno bifásico. Solo en este caso reemplazamos ... el "devanado de fase infinita" del cilindro (un número infinito de cuadros) con dos bobinas con inductancia y resistencia equivalentes. Después de todo, dos bobinas pueden crear exactamente el mismo vector de corriente y flujo magnético que un cilindro.Y ahora aprovechemos un breve tiempo de una máquina asíncrona sincrónica. Alimentamos el eje β en la bobinacorriente continua y espere dos o tres segundos hasta que las corrientes de respuesta dejen de fluir en el rotor: "traeremos un imán externo". Es decir, esperamos que las corrientes caigan en el rotor para que el campo magnético del estator "atraviese el rotor" y nadie interfiera con él. ¿Qué pasará ahora si apaga la corriente en el estator? Así es, durante los mismos dos o tres segundos, mientras que la corriente del rotor se opone a esto, obtendremos un "imán ordinario" del rotor (Figura 3).Figura 3. Motor asíncrono, cuando la corriente continua en la fase β se acaba de apagar, la corriente fluye en el rotor i rd .Que estamos esperando Más rápido, hasta que el imán desaparezca, dibujamos a lo largo del eje d familiar (como en una máquina síncrona) y el eje q perpendicular a él , unido al rotor. Activamos la estructura del control vectorial de la máquina síncrona, aplicamos corriente a lo largo del eje q , creando un momento, ¡vamos!Entonces, incluso puedes hacer algunas revoluciones hasta que nuestro imán de azúcar se haya derretido y el eje dNo ha ido al olvido. Que hacer ¡No apaguemos la corriente a lo largo del eje d, alimentando nuestro imán! Y nuevamente, guardemos la estructura de control vectorial de la máquina síncrona, simplemente enviando la tarea a lo largo del eje d (anteriormente había cero). Entonces, miramos la Figura 4: los ejes d , q están "unidos" al rotor por el sensor de posición, el motor está parado, se suministra la corriente a lo largo del eje d en el estator, que en este caso coincide con el eje β para una máquina de pie . No hay corriente a lo largo del eje q : esperamos hasta que el rotor se "magnetice". ¡Y ahora alimentamos la corriente i sq (s - stator)! Vamos!Figura 4. Aplicamos corriente al eje d , magnetizando la máquina, preparando todo para suministrar corriente al eje del estator q .¿Hasta dónde llegaremos con este método del barón Munchausen? Lamentablemente no. Vea lo que sucedió (Figura 5):Figura 5. ¡Se ha resbalado un imán!El motor comenzó a girar, pero un tiempo después de que aplicamos corriente al eje q , formando la corriente total i sy "clavamos" este vector en la posición del rotor, el imán en el rotor se "movió". Y se situó exactamente a lo largo del vector i s . El rotor no comprende dónde dibujamos los ejes d , q ... No le importa si estaba girando o no. Es importante que su "imán inducido" interno finalmente quiera codirigirse con el flujo magnético del estator, para "obedecer" el flujo externo. Debido al imán que se ha movido hacia afuera, el motor dejará de girar: no solo eso, entre el imán del rotor y la corriente i q no hay 90 grados deseados, también hay una corriente del ejed ahora lo tira en la dirección opuesta, compensando el momento creado por la corriente i q . El método del barón Munchausen falló.¿Qué hacer con un escurridizo imán de rotor? Y hagamos que la estructura de control vectorial del motor de inducción no se encuentre en los ejes d , q unidos al rotor, sino en otros ejes unidos exactamente a la posición actual del "imán del rotor": llamémoslos ejes x , y para distinguirlos de d , q. Según el "científico", estos son ejes orientados a lo largo del enlace de flujo del rotor. Pero, ¿cómo saber exactamente dónde está ahora el enlace de flujo del rotor, es decir? ¿Dónde se gira el imán en el rotor? Su posición depende ... en primer lugar, de la posición del rotor en sí (tenemos un sensor de posición, bueno), en segundo lugar, de las corrientes del estator (creando una corriente del estator, que el imán del rotor finalmente girará), y en tercer lugar de los parámetros de la cadena del rotor: la inductancia y resistencia del "cilindro de cobre" (es una jaula de ardilla, es el devanado del rotor, es la cadena del rotor). Por lo tanto ... sabiendo todo esto, la posición del "imán" del rotor puede calcularse simplemente usando varias ecuaciones diferenciales. Esto se realiza mediante el denominado observador de enlace de flujo del rotor, resaltado en color en el diagrama estructural final del control vectorial de un motor asíncrono (Figura 6).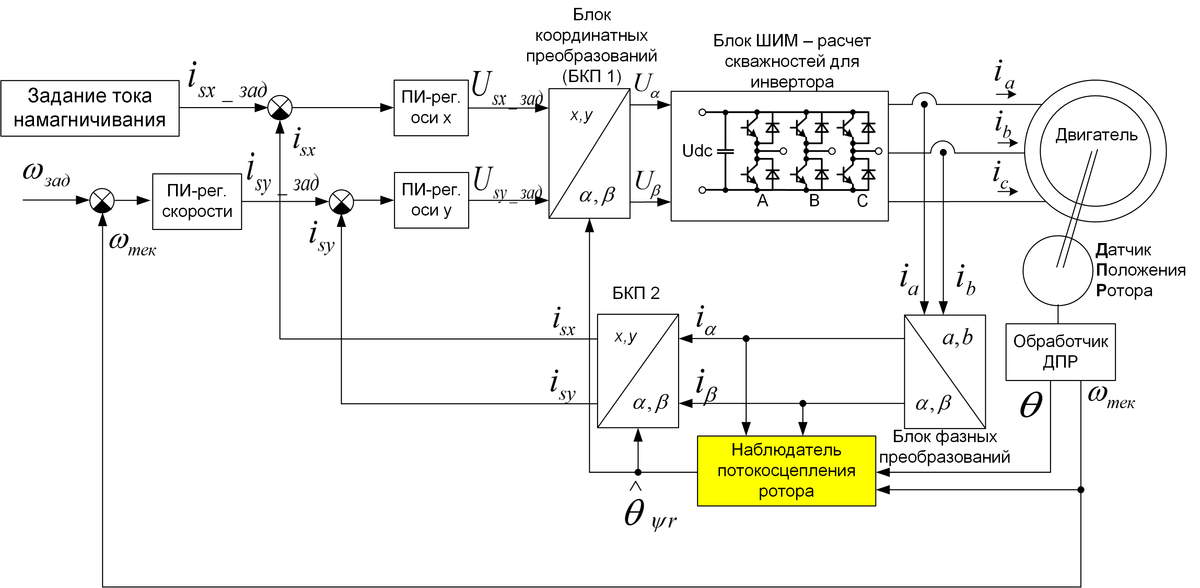
 . De lo contrario, la estructura es completamente similar a la de una máquina síncrona, solo los ejes d , q se renombran a x , y , y el eje x recibe una especificación actual que admitirá nuestro "imán" en el rotor. Además, la " s"Para mostrar que este valor se relaciona con el estator, y no con el rotor. También se debe tener en cuenta que en la literatura occidental no utilizan los ejes x , y : para ellos, el eje d siempre se dirige a lo largo del campo del rotor, que es para un motor asíncrono y para uno síncrono. Incluso en la época soviética, nuestros científicos separaron los ejes d , q y x , y , para evitar confusiones: d , q están unidos al rotor y x , y están unidos al campo del rotor .Que resulta El imán del rotor se desliza todo el tiempo, se desliza desde la posición actual del rotor hacia la corriente del eje y. Cuanto mayor es esta corriente, más fuerte es el deslizamiento. El observador en tiempo real calcula la posición de este imán y "gira" los ejes x , y todo el tiempo hacia adelante con respecto a los ejes d , q (posición del rotor). El eje x siempre corresponde a la posición actual del enlace de flujo en el rotor, la posición del "imán". Es decir eje x , ysiempre funcione (en modo motor) un poco más rápido que la rotación del rotor, compensando el deslizamiento en él. Las corrientes en el rotor, si se miden o modelan, son sinusoidales. Solo cambian no con la frecuencia de las corrientes del estator, sino con la frecuencia de este deslizamiento, es decir muy despacio Si el estator del asíncrono industrial es de 50Hz, entonces cuando se trabaja bajo carga, la frecuencia actual en el rotor es unidades de hertz. Eso, de hecho, es todo el secreto del control vectorial para un motor de inducción.¿Cómo es el control vectorial de un motor de inducción mejor que el escalar? El control escalar es tal cuando se aplica un voltaje de una frecuencia y amplitud dada al motor, por ejemplo, 380V 50Hz. Y no depende de la carga en el rotor: no hay controladores de corriente y de vectores ... La frecuencia de voltaje y su amplitud solo se establecen: cantidades escalares y permiten que las corrientes y los flujos en el motor encuentren un lugar conveniente para ellos mismos como lo deseen. En el funcionamiento del motor en estado estacionario, el control vectorial es indistinguible del control escalar; el control vectorial también aplicará lo mismo, digamos, 380V, 50Hz a la carga nominal. Pero en condiciones transitorias ... si necesita arrancar rápidamente el motor en un momento dado, si necesita elaborar un diagrama de movimiento, si hay una carga de pulso,Si necesita hacer un modo generador con un cierto nivel de potencia, todo este control escalar no puede hacerlo, o lo hace con transitorios desagradables y lentos, que también pueden "noquear" al convertidor de frecuencia al exceder la corriente o el voltaje del enlace de CC (motor oscila y puede saltar al modo generador, al que el convertidor de frecuencia no siempre está adaptado).En la estructura vectorial, "todo está bajo control". En el momento en que te estableces, el flujo también. Puede limitarlos al nivel correcto para no exceder la configuración de protección. Es posible forzar las corrientes de manera controlada si se necesita poco tiempo para hacer un momento varias veces mayor. Es posible regular no solo el momento del motor, sino también el flujo (corriente del eje x ): si la carga en el motor es pequeña, entonces no tiene sentido mantener el flujo completo en el rotor (haciendo un imán de "modo nominal"): puede debilitarlo y reducir las pérdidas. Es posible estabilizar la velocidad con un controlador de velocidad con alta precisión y velocidad. Puede usar una unidad asíncrona como unidad de tracción (en transporte), estableciendo el momento de tracción requerido. En general, para aplicaciones complejas con funcionamiento dinámico del motor, el control vectorial de un motor de inducción es indispensable.También hay características distintivas del control vectorial de un motor asíncrono de uno síncrono. El primero es el sensor de posición. Si para un accionamiento síncrono necesitamos conocer la posición absoluta del rotor para comprender dónde está el imán, entonces esto no es necesario en un accionamiento asíncrono. El rotor no tiene una estructura de polo pronunciada, el "imán" se desliza constantemente, y si observa las fórmulas del observador de enlace de flujo del rotor, entonces no necesita saber la posición: solo la velocidad del rotor está incluida en las fórmulas (de hecho, hay diferentes fórmulas, pero en general así). Por lo tanto, puede ahorrar en el sensor: un codificador incremental convencional es suficiente para rastrear la velocidad (o incluso un tacogenerador), no se requieren sensores de posición absoluta. La segunda característica es el control de flujo en un motor de inducción.En una máquina síncrona con imanes permanentes, el flujo no está regulado, lo que limita la velocidad máxima del motor: el voltaje en el inversor deja de ser suficiente. En un motor de inducción, cuando esto sucede ... simplemente disminuya la referencia del ejexy seguir adelante! ¡La frecuencia máxima es ilimitada! Sí, el par motor disminuirá a partir de esto, pero, lo más importante, puede subir, a diferencia de una máquina síncrona (en realidad, también es posible allí, pero no lejos, no para todos los motores y con muchos problemas).De manera similar, existen algoritmos de control de vectores sin sensores para un motor de inducción que estiman el ángulo de flujo del rotor sin usar la señal del sensor de posición (o velocidad) del eje del rotor. De la misma manera que para las máquinas síncronas, existen problemas en el funcionamiento de dichos sistemas a una velocidad de rotor baja, donde el EMF del motor es pequeño.También debe decir algunas palabras sobre el rotor. Si para motores asíncronos industriales se abarata usando una jaula de ardilla de aluminio, entonces en tracción, donde los indicadores de peso y tamaño son más importantes, por el contrario, pueden usar un cilindro de cobre. Entonces, en todos sus vehículos eléctricos Tesla favoritos, hay precisamente un motor eléctrico asíncrono con un rotor de cobre (Figura 7)Figura 7. Rotor del motor eléctrico asíncrono Modelo S de Tesla en revestimiento de acero (foto de varias fuentes para diferentes años)Esto, de hecho, es todo lo que quería decir sobre el motor asíncrono. En este artículo de revisión, no se han considerado muchas sutilezas, como el regulador de flujo del rotor, la posible construcción de una estructura vectorial en otros ejes de coordenadas, las matemáticas del observador de enlace de flujo del rotor y mucho más. Al final del último artículo, para más detalles, remito al lector a libros modernos sobre el variador, por ejemplo, "Anuchin A. S. Sistemas de control de variadores eléctricos. MEI, 2015 " .En qué microcontrolador puede realizar un control vectorial completo, lea, por ejemplo, en el artículo "Nuevo microcontrolador de control de motor doméstico K1921VK01T de OJSC" NIIET "y cómo depurarlo en el artículo "Métodos para depurar el software del microcontrolador en una unidad eléctrica" . Nuestra empresa LLC NPF Vector también ofrece el desarrollo de sistemas de control a medida para motores eléctricos y otros equipos eléctricos, en nuestro sitio web se pueden ver ejemplos de proyectos completados .PD:Pido disculpas a los especialistas por el tratamiento no del todo correcto con algunos términos, en particular con los términos "flujo", "enlace de flujo", "campo magnético" y otros: la simplicidad requiere sacrificio ...
. De lo contrario, la estructura es completamente similar a la de una máquina síncrona, solo los ejes d , q se renombran a x , y , y el eje x recibe una especificación actual que admitirá nuestro "imán" en el rotor. Además, la " s"Para mostrar que este valor se relaciona con el estator, y no con el rotor. También se debe tener en cuenta que en la literatura occidental no utilizan los ejes x , y : para ellos, el eje d siempre se dirige a lo largo del campo del rotor, que es para un motor asíncrono y para uno síncrono. Incluso en la época soviética, nuestros científicos separaron los ejes d , q y x , y , para evitar confusiones: d , q están unidos al rotor y x , y están unidos al campo del rotor .Que resulta El imán del rotor se desliza todo el tiempo, se desliza desde la posición actual del rotor hacia la corriente del eje y. Cuanto mayor es esta corriente, más fuerte es el deslizamiento. El observador en tiempo real calcula la posición de este imán y "gira" los ejes x , y todo el tiempo hacia adelante con respecto a los ejes d , q (posición del rotor). El eje x siempre corresponde a la posición actual del enlace de flujo en el rotor, la posición del "imán". Es decir eje x , ysiempre funcione (en modo motor) un poco más rápido que la rotación del rotor, compensando el deslizamiento en él. Las corrientes en el rotor, si se miden o modelan, son sinusoidales. Solo cambian no con la frecuencia de las corrientes del estator, sino con la frecuencia de este deslizamiento, es decir muy despacio Si el estator del asíncrono industrial es de 50Hz, entonces cuando se trabaja bajo carga, la frecuencia actual en el rotor es unidades de hertz. Eso, de hecho, es todo el secreto del control vectorial para un motor de inducción.¿Cómo es el control vectorial de un motor de inducción mejor que el escalar? El control escalar es tal cuando se aplica un voltaje de una frecuencia y amplitud dada al motor, por ejemplo, 380V 50Hz. Y no depende de la carga en el rotor: no hay controladores de corriente y de vectores ... La frecuencia de voltaje y su amplitud solo se establecen: cantidades escalares y permiten que las corrientes y los flujos en el motor encuentren un lugar conveniente para ellos mismos como lo deseen. En el funcionamiento del motor en estado estacionario, el control vectorial es indistinguible del control escalar; el control vectorial también aplicará lo mismo, digamos, 380V, 50Hz a la carga nominal. Pero en condiciones transitorias ... si necesita arrancar rápidamente el motor en un momento dado, si necesita elaborar un diagrama de movimiento, si hay una carga de pulso,Si necesita hacer un modo generador con un cierto nivel de potencia, todo este control escalar no puede hacerlo, o lo hace con transitorios desagradables y lentos, que también pueden "noquear" al convertidor de frecuencia al exceder la corriente o el voltaje del enlace de CC (motor oscila y puede saltar al modo generador, al que el convertidor de frecuencia no siempre está adaptado).En la estructura vectorial, "todo está bajo control". En el momento en que te estableces, el flujo también. Puede limitarlos al nivel correcto para no exceder la configuración de protección. Es posible forzar las corrientes de manera controlada si se necesita poco tiempo para hacer un momento varias veces mayor. Es posible regular no solo el momento del motor, sino también el flujo (corriente del eje x ): si la carga en el motor es pequeña, entonces no tiene sentido mantener el flujo completo en el rotor (haciendo un imán de "modo nominal"): puede debilitarlo y reducir las pérdidas. Es posible estabilizar la velocidad con un controlador de velocidad con alta precisión y velocidad. Puede usar una unidad asíncrona como unidad de tracción (en transporte), estableciendo el momento de tracción requerido. En general, para aplicaciones complejas con funcionamiento dinámico del motor, el control vectorial de un motor de inducción es indispensable.También hay características distintivas del control vectorial de un motor asíncrono de uno síncrono. El primero es el sensor de posición. Si para un accionamiento síncrono necesitamos conocer la posición absoluta del rotor para comprender dónde está el imán, entonces esto no es necesario en un accionamiento asíncrono. El rotor no tiene una estructura de polo pronunciada, el "imán" se desliza constantemente, y si observa las fórmulas del observador de enlace de flujo del rotor, entonces no necesita saber la posición: solo la velocidad del rotor está incluida en las fórmulas (de hecho, hay diferentes fórmulas, pero en general así). Por lo tanto, puede ahorrar en el sensor: un codificador incremental convencional es suficiente para rastrear la velocidad (o incluso un tacogenerador), no se requieren sensores de posición absoluta. La segunda característica es el control de flujo en un motor de inducción.En una máquina síncrona con imanes permanentes, el flujo no está regulado, lo que limita la velocidad máxima del motor: el voltaje en el inversor deja de ser suficiente. En un motor de inducción, cuando esto sucede ... simplemente disminuya la referencia del ejexy seguir adelante! ¡La frecuencia máxima es ilimitada! Sí, el par motor disminuirá a partir de esto, pero, lo más importante, puede subir, a diferencia de una máquina síncrona (en realidad, también es posible allí, pero no lejos, no para todos los motores y con muchos problemas).De manera similar, existen algoritmos de control de vectores sin sensores para un motor de inducción que estiman el ángulo de flujo del rotor sin usar la señal del sensor de posición (o velocidad) del eje del rotor. De la misma manera que para las máquinas síncronas, existen problemas en el funcionamiento de dichos sistemas a una velocidad de rotor baja, donde el EMF del motor es pequeño.También debe decir algunas palabras sobre el rotor. Si para motores asíncronos industriales se abarata usando una jaula de ardilla de aluminio, entonces en tracción, donde los indicadores de peso y tamaño son más importantes, por el contrario, pueden usar un cilindro de cobre. Entonces, en todos sus vehículos eléctricos Tesla favoritos, hay precisamente un motor eléctrico asíncrono con un rotor de cobre (Figura 7)Figura 7. Rotor del motor eléctrico asíncrono Modelo S de Tesla en revestimiento de acero (foto de varias fuentes para diferentes años)Esto, de hecho, es todo lo que quería decir sobre el motor asíncrono. En este artículo de revisión, no se han considerado muchas sutilezas, como el regulador de flujo del rotor, la posible construcción de una estructura vectorial en otros ejes de coordenadas, las matemáticas del observador de enlace de flujo del rotor y mucho más. Al final del último artículo, para más detalles, remito al lector a libros modernos sobre el variador, por ejemplo, "Anuchin A. S. Sistemas de control de variadores eléctricos. MEI, 2015 " .En qué microcontrolador puede realizar un control vectorial completo, lea, por ejemplo, en el artículo "Nuevo microcontrolador de control de motor doméstico K1921VK01T de OJSC" NIIET "y cómo depurarlo en el artículo "Métodos para depurar el software del microcontrolador en una unidad eléctrica" . Nuestra empresa LLC NPF Vector también ofrece el desarrollo de sistemas de control a medida para motores eléctricos y otros equipos eléctricos, en nuestro sitio web se pueden ver ejemplos de proyectos completados .PD:Pido disculpas a los especialistas por el tratamiento no del todo correcto con algunos términos, en particular con los términos "flujo", "enlace de flujo", "campo magnético" y otros: la simplicidad requiere sacrificio ...Source: https://habr.com/ru/post/es389793/
All Articles