Prologo
En un artículo anterior , se consideró la formulación del problema para el desarrollo de una fuente de energía de respaldo de baja potencia para 60 W con una salida sinusoidal para la bomba de circulación del sistema de calefacción. Se eligió el concepto de implementación de este dispositivo. Este artículo discutirá el desarrollo del circuito eléctrico del dispositivo, con los cálculos necesarios para elegir las clasificaciones de los componentes que componen el dispositivo.Armados con CAD y libros de texto, borradores, lápices y GOOGLE, comenzaremos a diseñar. Comencemos con uno simple: el sistema de alimentación del dispositivo.Catering
Para alimentar los elementos del circuito, necesitamos tres tipos de bus de CC a 12, 5 y 3,3 voltios.Autobús de doce voltios: el principal. Es la fuente de alimentación del puente, que inyecta corriente en el devanado de bajo voltaje de un transformador de red lineal. Desde allí alimentamos al conductor de los transistores incluidos en el puente. Los relés de conmutación de red también se alimentarán desde este bus.Se necesita un bus de cinco voltios para alimentar el chip de corriente ACS712, el chip lógico, el LCD de caracteres, etc.El bus de tres voltios alimentará los "cerebros" del dispositivo: MK STM32F100C8T6B.Digresión líricaProteuse v 7.7. , . , Dip Trace. . .
Tal esquema nació: la imagen es clicable. Los formadores de bus de 5 y 3,3 voltios están organizados en estabilizadores LDO al 1% del tipo NCP1117STxx. La fuente de alimentación analógica del módulo ADC se toma del bus de 3,3 voltios a través de condensadores de inductancia, suavizado y bloqueo. La tierra analógica también debe dividirse. Pero este no es el caso en este esquema, ya que las mediciones no son críticas, y un error de un par de dígitos no conducirá a una "alteración" del dispositivo. Aplicamos un filtro de software, un promedio móvil e incluso podemos lograr errores en una categoría.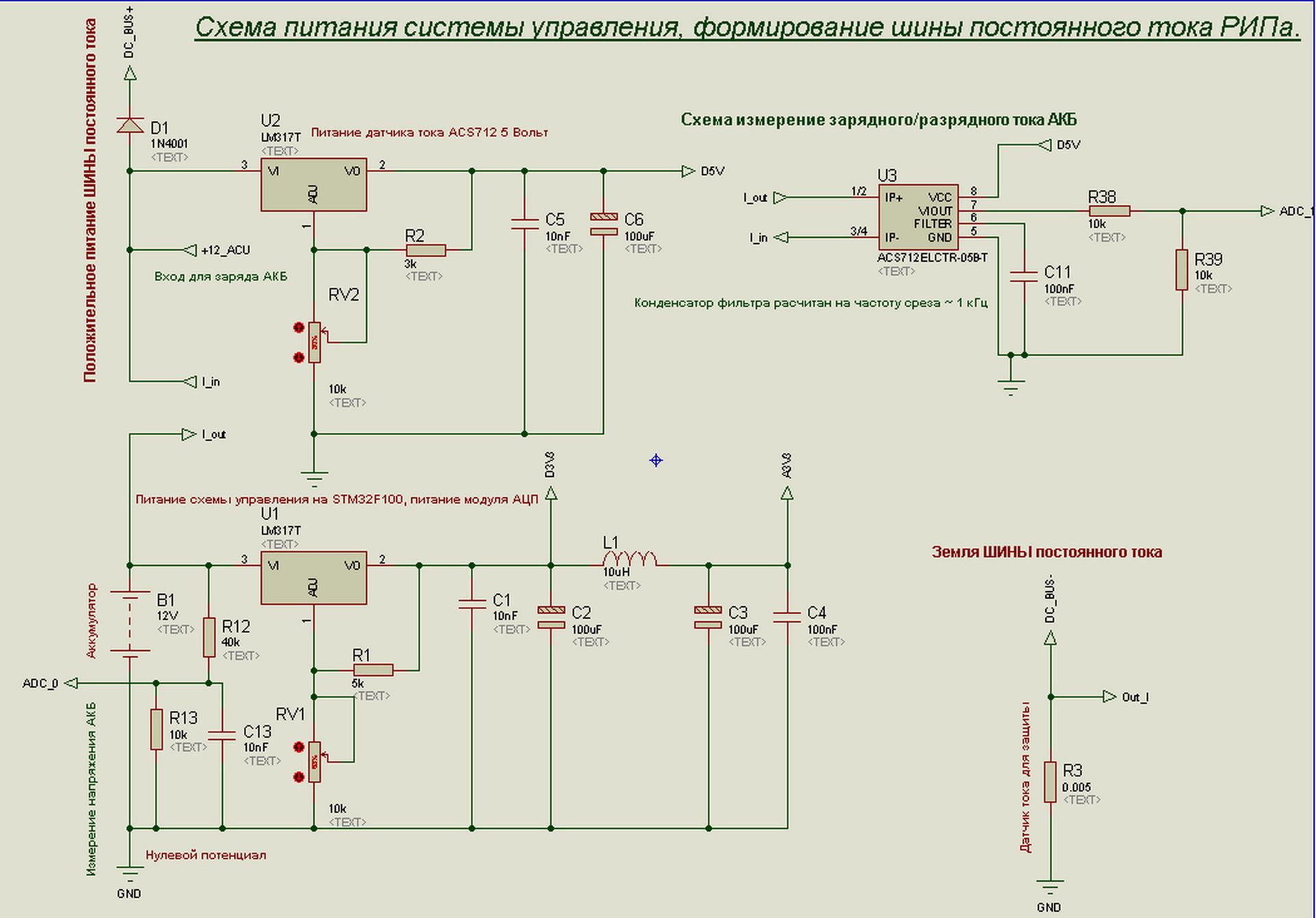
Medida de corriente y protección contra sobrecarga
El sensor de corriente ACS712ELCTR-05B-T es un circuito integrado. La detección de corriente ocurre en el efecto Hall. Este sensor permite que el MK mida tanto la corriente directa como la inversa. Otras características se pueden encontrar en su pdf . La salida del sensor es analógica. Punto medio correspondiente a corriente cero = 2.5 V. Ganancia 185mV por 1 Amp. Aunque el sensor detecta altas corrientes, solo la linealidad está distorsionada y, a una cierta corriente, entra en saturación. Entonces, para coordinar la salida del sensor con MK, coloque un divisor de voltaje. Y divide la escala por la mitad. Los bits ADC MK son suficientes para una precisión aceptable.Para protección de alta velocidad contra sobrecarga o cortocircuito en el devanado de bajo voltaje de un transformador lineal, instale una derivación de corriente. La señal de la derivación se fuerza en el amplificador operacional y en el comparador ensamblamos un circuito de comparación con un pestillo. Los datos de sobrecarga serán conducidos al MK, y también con esta señal cerraremos TODAS las teclas del puente.A continuación se presenta un breve video que simula el funcionamiento de la protección actual.Parte de potencia
La parte de potencia del RIP se muestra en la figura. Se puede hacer clic en la imagen.
El puente del transistor "depende" de la derivación actual para proporcionar protección de alta velocidad. La salida del puente a través de un filtro LC, diseñado para una frecuencia de corte de ~ 1 kHz, se alimenta al devanado de baja tensión del transformador. Deberíamos hablar sobre el filtro y el transformador con más detalle. El cálculo del filtro se realizó en el enlace del programa "Calculadora RL" a la llamada desactivada. No puedo encontrar el sitio. Por lo tanto, el archivo con la calculadora publicado aquí . Aquí está la pantalla de cálculo.
 La inductancia resultante de 10 miligenry es bastante impresionante. Pero la capacidad era decente. Como tenemos un cambio en la salida del filtro, no puede hacerlo con un condensador polar. Puso dos condensadores de cerámica en paralelo en el circuito: 4.7 microfaradios, X7R, 25V (1206).El cálculo del acelerador de acuerdo con los datos obtenidos se realizó en el programa Coil32. Aquí hay un enlace al archivo con el programa. Elegí un anillo de ferrita para tal acelerador con los siguientes parámetros: Anillo N87 R25x15x10. Aquí está la pantalla de cálculo en el programa.
La inductancia resultante de 10 miligenry es bastante impresionante. Pero la capacidad era decente. Como tenemos un cambio en la salida del filtro, no puede hacerlo con un condensador polar. Puso dos condensadores de cerámica en paralelo en el circuito: 4.7 microfaradios, X7R, 25V (1206).El cálculo del acelerador de acuerdo con los datos obtenidos se realizó en el programa Coil32. Aquí hay un enlace al archivo con el programa. Elegí un anillo de ferrita para tal acelerador con los siguientes parámetros: Anillo N87 R25x15x10. Aquí está la pantalla de cálculo en el programa. Resultó 70 vueltas de alambre con un diámetro de 1 mm, para garantizar la inductancia requerida. Es bastante aceptable para el bobinado manual.La elección del transformador recayó en un transformador toroidal tipo TTP-60, con un voltaje secundario de 9 voltios. El cálculo es simple. Un voltaje alterno de 9 voltios da una amplitud de 12.7 voltios. El voltaje de una batería cargada es de aproximadamente 13 voltios. Entonces podemos obtener más o menos 220 voltios en la salida. Para cargar la batería, por supuesto, no lo suficiente. Por lo tanto, hay una sugerencia para obtener el devanado secundario de las curvas 5-6. Es decir, un devanado de bajo voltaje con un grifo resultó. De los terminales extremos del devanado eliminamos el aumento de voltaje para cargar la batería durante la operación de la red. Y aplicamos voltaje desde el puente a la terminal extrema y media cuando trabajamos desde la batería. De acuerdo con el voltaje tomado de los terminales extremos del devanado, juzgamos el voltaje en el devanado de alto voltaje durante la operación desde la batería, retroalimentación para el ajuste.Los transistores de puente se controlan desde el MK a través de los controladores de medio puente IRS2101S. La gestión de las teclas superiores se lleva a cabo de acuerdo con el esquema de arranque. El transistor de carga del canal P está controlado por un bipolar convencional. El estrangulador de carga de suavizado tiene las mismas dimensiones y valores de diseño que el estrangulador en el filtro LC después del puente.
Resultó 70 vueltas de alambre con un diámetro de 1 mm, para garantizar la inductancia requerida. Es bastante aceptable para el bobinado manual.La elección del transformador recayó en un transformador toroidal tipo TTP-60, con un voltaje secundario de 9 voltios. El cálculo es simple. Un voltaje alterno de 9 voltios da una amplitud de 12.7 voltios. El voltaje de una batería cargada es de aproximadamente 13 voltios. Entonces podemos obtener más o menos 220 voltios en la salida. Para cargar la batería, por supuesto, no lo suficiente. Por lo tanto, hay una sugerencia para obtener el devanado secundario de las curvas 5-6. Es decir, un devanado de bajo voltaje con un grifo resultó. De los terminales extremos del devanado eliminamos el aumento de voltaje para cargar la batería durante la operación de la red. Y aplicamos voltaje desde el puente a la terminal extrema y media cuando trabajamos desde la batería. De acuerdo con el voltaje tomado de los terminales extremos del devanado, juzgamos el voltaje en el devanado de alto voltaje durante la operación desde la batería, retroalimentación para el ajuste.Los transistores de puente se controlan desde el MK a través de los controladores de medio puente IRS2101S. La gestión de las teclas superiores se lleva a cabo de acuerdo con el esquema de arranque. El transistor de carga del canal P está controlado por un bipolar convencional. El estrangulador de carga de suavizado tiene las mismas dimensiones y valores de diseño que el estrangulador en el filtro LC después del puente.Detección de red y conmutación
Para la detección de red, se utiliza un circuito de alimentación de condensador. El voltaje se enciende al optoacoplador. La salida del optoacoplador se dirige al MK para controlar la disponibilidad de la red. El diagrama se muestra a continuación. Se puede hacer clic en la imagen.
La tensión de red a través de un condensador de apagado, diodos, un diodo zener, condensadores de suavizado, una resistencia limitadora de corriente se alimenta al LED del optoacoplador. La salida va a MK. Los relés que conmutan la red a la carga son controlados por el MK. La protección actual se implementa en el amplificador operacional y el comparador. La salida del comparador diverge en dos transistores. Uno para ingresar la señal en el MK, el segundo para cerrar todos los transistores de puente. La siguiente figura muestra los circuitos de activación del controlador para el puente. Se puede hacer clic en la imagen.
Todo estándar, según
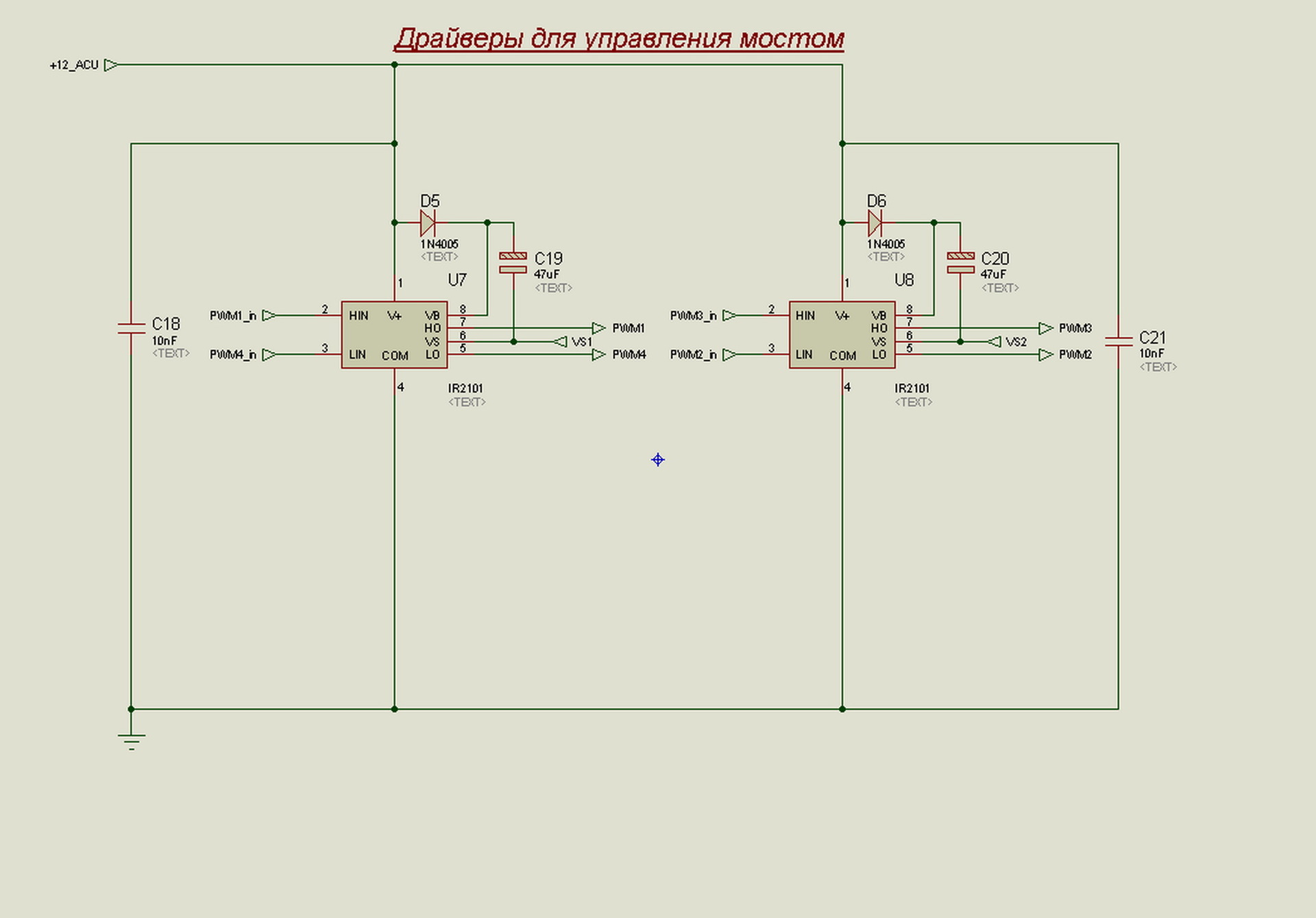 Hoja de datos para el controlador IRS2101S.
Hoja de datos para el controlador IRS2101S.Puente de circuito de conformación de pulso
Para no cargar al MK con un trabajo inútil, la formación de las señales de los pulsos del puente se recoge en la lógica I. Se requieren tres señales del MK. Un PWM sinusoidal por período, así como dos señales discretas, la primera media onda y la segunda. La implementación de este enfoque se muestra en la figura. Se puede hacer clic en la imagen. Sobrecorriente, establecida en MK y duplicada por LED. El control del transistor del canal P de carga se organiza en un transistor bipolar NPN. La lógica del puente será la siguiente. PWM de 20 kHz será modulado por una tabla senoidal en la cantidad de 400 valores. La transferencia de valores al registro PWM se organizará a través de DMA. Después de cargar la mitad del búfer, es decir, 200 valores, un medio ciclo, el DMA provocará una interrupción, donde las señales MCU_P_1 y MCU_P_2 se invertirán mutuamente. Después de cargar todo el búfer, las señales MCU_P_1 y MCU_P_2 se invertirán en la interrupción del DMA. Y más en un modo cíclico. Se proporcionará un nivel constante de media onda al transistor del brazo superior y un PWM sinusoidal a la tecla inferior del brazo opuesto. El próximo medio ciclo es otro par de transistores.Durante la sobrecorriente, el transistor NPN Q7 proporcionará un nivel bajo en la entrada lógica, lo que a su vez conducirá a un nivel bajo en la salida lógica y, como resultado, bloqueará TODOS los transistores de puente.
La lógica del puente será la siguiente. PWM de 20 kHz será modulado por una tabla senoidal en la cantidad de 400 valores. La transferencia de valores al registro PWM se organizará a través de DMA. Después de cargar la mitad del búfer, es decir, 200 valores, un medio ciclo, el DMA provocará una interrupción, donde las señales MCU_P_1 y MCU_P_2 se invertirán mutuamente. Después de cargar todo el búfer, las señales MCU_P_1 y MCU_P_2 se invertirán en la interrupción del DMA. Y más en un modo cíclico. Se proporcionará un nivel constante de media onda al transistor del brazo superior y un PWM sinusoidal a la tecla inferior del brazo opuesto. El próximo medio ciclo es otro par de transistores.Durante la sobrecorriente, el transistor NPN Q7 proporcionará un nivel bajo en la entrada lógica, lo que a su vez conducirá a un nivel bajo en la salida lógica y, como resultado, bloqueará TODOS los transistores de puente.Plataforma de hardware
El bus de tres voltios alimentará los "cerebros" del dispositivo: MK STM32F100C8T6B.
Como se mencionó anteriormente, MK será de la familia ST STM32. ¿Qué determina tal elección?- MK tiene un bajo costo. Los análogos de oportunidad de ATMEL o PIC tienen precios aún más altos, con una capacidad de 8 bits.
- La presencia a bordo del controlador ADC, DAC, DMA de 12 bits.
- Capacidad de núcleo de 32 bits.
- Aumento de la capacidad de memoria de programas y datos.
En una palabra, gana en muchas posiciones.Para indicar el funcionamiento del dispositivo y emitir los datos necesarios, se utilizará en el circuito una pantalla LCD sintetizadora de señales con un controlador de control KS0066 (HD44780). Hay muchas bibliotecas para trabajar con una pantalla de este tipo en RuNet.El diagrama de conexión de la pantalla al controlador es el siguiente. Se puede hacer clic en la imagen.
La conexión es directa. Los puertos MK están directamente conectados a la pantalla. No se realizó la conjugación de lógica de 3 voltios y 5 voltios. Aquí pueden surgir problemas, y las conclusiones de MK tendrán que configurarse como salidas con un colector abierto, y las líneas deben extraerse hasta 5 voltios, y las salidas MK deben usarse con tolerancia a 5 voltios. Como dice el refrán, la vida se mostrará, pero al desarrollar una placa de circuito impreso, es necesario establecer esta "actualización".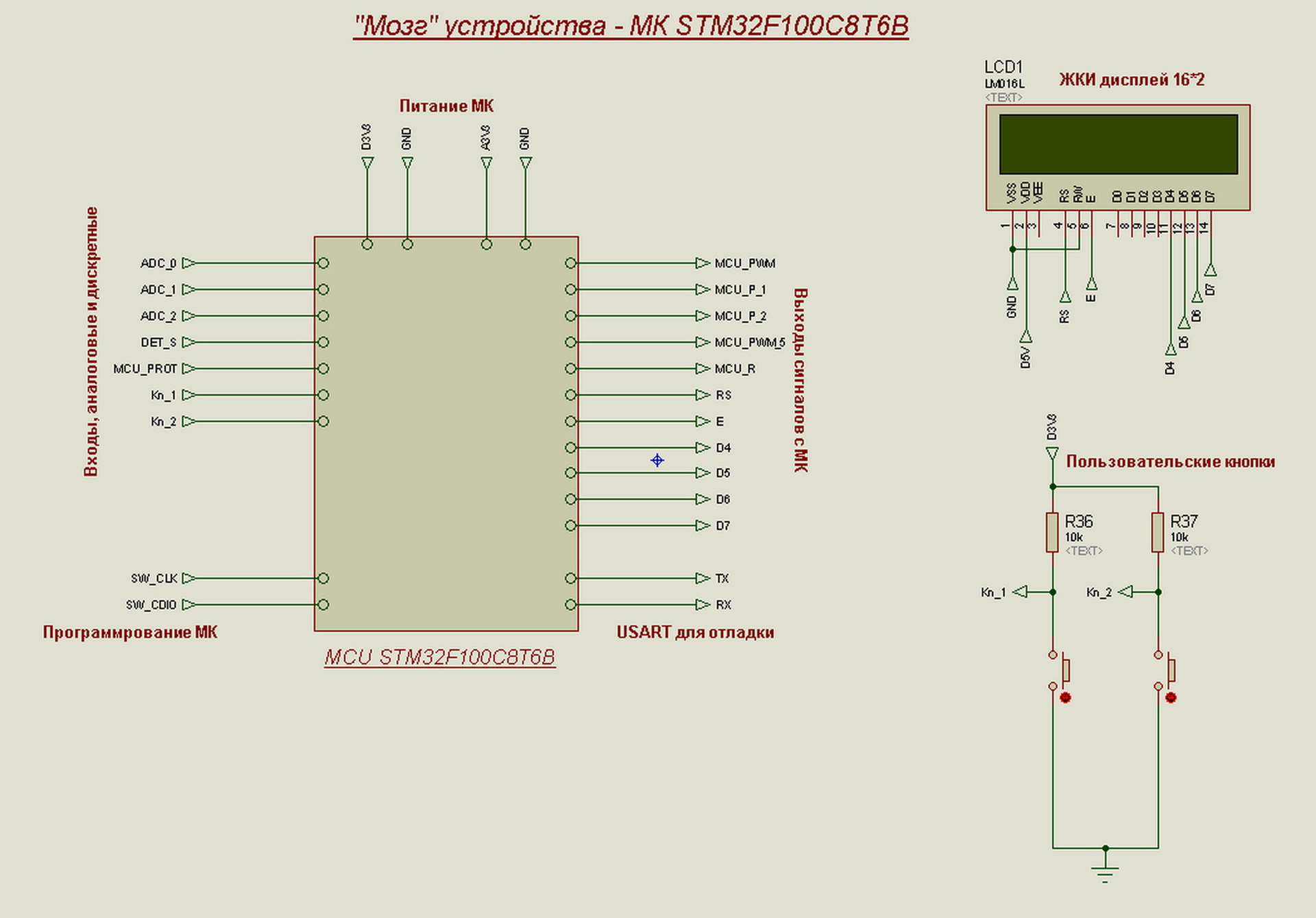 Se requieren botones personalizados para organizar la navegación a través de los menús y parámetros que se muestran en la pantalla.
Se requieren botones personalizados para organizar la navegación a través de los menús y parámetros que se muestran en la pantalla.Cálculos adicionales
Para calcular el condensador de arranque, utilizamos el método propuesto en este artículo . Al final de la descripción hay un ejemplo de cálculo de la capacidad necesaria de un condensador de arranque. Lo tomamos como base y contamos nuestras realidades.Decidimos los parámetros del circuito:- V IN, MAX = 15 V voltaje de entrada máximo,
- V DRV = voltaje de alimentación del controlador de 12V y la amplitud de la señal de control,
- dV BST = tensión de ondulación de 0,5 V a través del condensador C BST en estado estacionario,
- dVBST,MAX = 3V CBST ,
- fDRV = 100 Hz , 10 ,
- DMAX = 1 .
:- QG = 24 nC IRLZ44ZS VDRV = 5V VDS = 44V,
- RGS = 10 RGS,
- IR = 10uA DBST TJ = 80°C,
- VF = 0.6V DBST 0.1A TJ = 80°C,
- ILK = 0.13mA TJ = 100°C,
- IQBS = 1mA , .
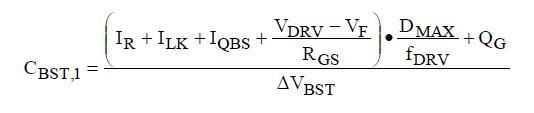
 Seleccionamos el valor calculado de la serie estándar. Tome el tipo de condensador de tantalio, para reducir la corriente de fuga del condensador en sí. En total, resulta 47 μF x 25 V, tipo D.Calculamos la corriente de carga del condensador, seleccionando así un diodo.
Seleccionamos el valor calculado de la serie estándar. Tome el tipo de condensador de tantalio, para reducir la corriente de fuga del condensador en sí. En total, resulta 47 μF x 25 V, tipo D.Calculamos la corriente de carga del condensador, seleccionando así un diodo. Por lo tanto, un diodo diseñado para una corriente continua de 1 A hará frente a esta tarea.
Por lo tanto, un diodo diseñado para una corriente continua de 1 A hará frente a esta tarea.Conclusión
Este artículo desarrolló el circuito eléctrico del RIP. Ahora juntaremos todas las piezas del circuito. Y en base al esquema ya aprobado, desarrollaremos la topología de la placa de circuito impreso. Presentaré el diseño de la PCB y el circuito eléctrico generalizado con la especificación de los componentes en el próximo artículo.Escribiré la implementación del software de la funcionalidad del dispositivo en un artículo separado. Existe una idea para implementar en el programa muchas soluciones interesantes, por ejemplo, la regulación PID del voltaje de salida cuando se trabaja desde la batería.Epílogo
Con este artículo, quería llevar ante el tribunal al público y experimentados jamones y no aficionados, también, soluciones esquemáticas. Quizás un lector atento encuentre errores críticos en los circuitos o sugiera una ejecución más correcta de los nodos individuales. Existe una solución más simple para los nodos o para aumentar la confiabilidad para introducir soluciones de circuitos adicionales.PSEnlaces a todas las partes del ciclo:- Desarrollo de una fuente de alimentación de respaldo de baja potencia con una salida sinusoidal. Parte 1. Declaración del problema.
- Desarrollo de una fuente de alimentación de respaldo de baja potencia con una salida sinusoidal. Parte 2. Desarrollo de un diagrama de circuito eléctrico.
- Desarrollo de una fuente de alimentación de respaldo de baja potencia con una salida sinusoidal. Parte 3. Trabaja en errores