Pensamientos en voz alta. Y voy caminando ... O por qué se necesitan robots para caminar
En los robots móviles terrestres, los sistemas de movimiento con orugas y ruedas se usan tradicionalmente, el uso de tales sistemas está dictado por la facilidad de implementación y la continuidad de los vehículos terrestres. Al mismo tiempo, hay muchos sistemas de movimiento especializados, entre los cuales los sistemas de caminar y los robots móviles basados en ellos son de particular interés para científicos y escritores de ciencia ficción.Las patas mecánicas (pedipuladores) proporcionan el movimiento de un robot móvil y brindan la capacidad de pasar por encima de los obstáculos, respectivamente, el uso de un robot caminante es aconsejable cuando los obstáculos son insuperables para un robot con orugas y ruedas, pueden ser objetos más altos que la altura del chasis del robot o áreas pantanosas, y el uso del chasis es grande las dimensiones no son aceptables debido al uso del robot en terrenos irregulares o en entornos urbanos, así como al alto consumo de energía del chasis.¿Cuántas patas necesita un robot?El número de patas afecta la estabilidad del robot, respectivamente, el uso de robots con el número de patas de más de un par (caminar con múltiples piernas o locomoción con múltiples patas) es aconsejable en terrenos difíciles. El uso de un par de piernas (caminar bípedo o bipedalidad, locomoción bípeda) es aconsejable para moverse en el interior de la habitación y el área urbana, como dicho entorno está adaptado para una persona con su postura erguida sobre dos piernas.¿Para qué fines usar robots andantes? Si recurrimos a las películas de ciencia ficción, por ejemplo, con mayor frecuencia, los robots que caminan se representan en forma de vehículos militares y puede haber una opinión errónea de que tal técnica es una panacea en el campo de batalla, pero esto no es así.En la película Star Wars o, por ejemplo, en la película de ciencia ficción Avatar, estos vehículos se utilizan en operaciones militares en terreno abierto y accidentado, lo que los desenmascara por completo debido a su alto perfil y los convierte en un blanco fácil para la artillería y otros objetos pesados. armas A diferencia del ejemplo anterior, la primera parte de la película "Robocop" y la película "Robot llamado Chappi" muestran robots andantes que operan en un entorno urbano, pero el diseño de sus pedipuladores no les permite superar grandes obstáculos (para un paso efectivo, el diseño de los pedipuladores debe ser similar a la estructura de un humano piernas), así como maniobrar en un entorno de ciudad, lo que los convierte en un objetivo fácil, a pesar de tener una armadura pesada. La situación es completamente similar con el uso de tanques en la ciudad. Figura 1 - Caminante AT-AT de la película Star Wars.
Figura 1 - Caminante AT-AT de la película Star Wars. Figura 2 - Exoesqueleto AMP de la película Avatar.
Figura 2 - Exoesqueleto AMP de la película Avatar. Figura 3 - Robot ED-209 de la película Robocop.
Figura 3 - Robot ED-209 de la película Robocop.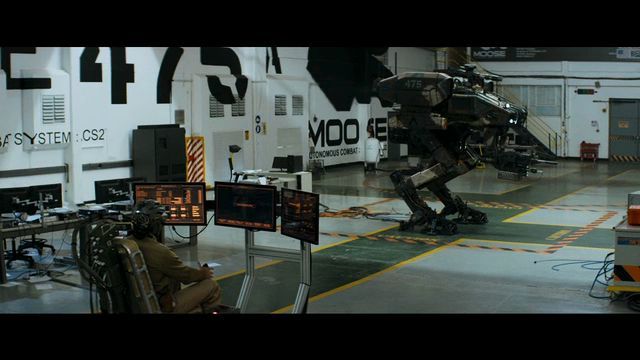 Figura 4 - Robot MOOSE de la película "Un robot llamado Chappy"Considere dónde es aconsejable usar robots para caminar.Robots de locomoción bípeda:
Figura 4 - Robot MOOSE de la película "Un robot llamado Chappy"Considere dónde es aconsejable usar robots para caminar.Robots de locomoción bípeda:- en forma de androides, en el campo de los servicios sociales, en robótica de consumo;
- en forma de una plataforma con equipos y manipuladores objetivo, en situaciones de emergencia, por ejemplo, durante el análisis, en la construcción, en el mantenimiento de objetos técnicos (equipos, ensamblajes);
- en forma de una plataforma blindada con un sistema de armas y manipuladores para el apoyo de fuego de operaciones terrestres en un entorno urbano, la destrucción de barreras de ingeniería, barricadas, mientras que la altura estimada del robot no debe exceder dos altura humana promedio, es decir 350 cm (este valor se obtuvo intuitivamente basado en SNiP 2.09.04-87, donde se indica que los edificios residenciales deben tener una altura de techo de al menos 250 cm y los edificios administrativos de al menos 300 cm, por supuesto, esta conclusión no pretende ser inequívoca) refugios en terrenos urbanos (es decir, al menos detrás de un edificio de un piso) y lo suficientemente grandes como para acomodar la carga útil.
Robots con locomoción de piernas múltiples:- en forma de plataforma con compartimento de carga, para expediciones en terreno accidentado, pantanoso y montañoso, mientras que el diseño de la plataforma con muchas articulaciones según el principio de la estructura del cuerpo de la oruga es deseable, para mejorar los obstáculos de la envolvente.
Conclusión Actualmente, los sistemas de caminar se usan solo en modelos experimentales de robótica y plataformas de investigación, y no se han usado ampliamente, porque No se han resuelto los problemas del equilibrio y el suministro eficiente de energía de los accionamientos del pedipulador. Pero la certeza en el uso de tales robots móviles es necesaria ahora para el desarrollo de conceptos de muestras significativas prácticas. Source: https://habr.com/ru/post/es390895/
All Articles