Módulo controlador universal para Internet de las cosas.
 K66BLEZ1 es una placa de módulo para desarrollar una amplia clase de dispositivos principalmente en el campo de IoT , electrónica ponible y pequeña automatización. Cuenta con una variedad de puertos e interfaces de entrada / salida, lo que le da una versatilidad extraordinaria. Creado en los últimos microcontroladores NXP de la familia Kinetis . Tiene a bordo un módulo de radio con soporte para Bluetooth LE 4.2 y ZigBee . También hay ranuras paratarjetas microSD y USB 2.0 HS con soporte para dispositivo , host , modos OTG y un cargador de batería de litio de 3.6 V. En la parte inferior se muestran dos ranuras de 60 contactos .. Hay un reloj en tiempo real no volátil con una batería separada. El tablero está acompañado de software de código abierto .
K66BLEZ1 es una placa de módulo para desarrollar una amplia clase de dispositivos principalmente en el campo de IoT , electrónica ponible y pequeña automatización. Cuenta con una variedad de puertos e interfaces de entrada / salida, lo que le da una versatilidad extraordinaria. Creado en los últimos microcontroladores NXP de la familia Kinetis . Tiene a bordo un módulo de radio con soporte para Bluetooth LE 4.2 y ZigBee . También hay ranuras paratarjetas microSD y USB 2.0 HS con soporte para dispositivo , host , modos OTG y un cargador de batería de litio de 3.6 V. En la parte inferior se muestran dos ranuras de 60 contactos .. Hay un reloj en tiempo real no volátil con una batería separada. El tablero está acompañado de software de código abierto .Brevemente sobre el tablero.
Hay dos microcontroladores instalados en la placa: MK66FN2M0VLQ18 (180 MHz, 2 MB de Flash, 256 KB de RAM) y MKW40Z160VHT4 (48 MHz, 160 KB de Flash, 20 KB de RAM) . El primero para la aplicación principal y el segundo para las comunicaciones inalámbricas. 90 pines de señal del microcontrolador MK66 se enrutan a dos conectores externos.6- PCB 2,4 .
— FR4,
.
— Immersion gold ENIG.
( )
| UMC.

.

( )
|
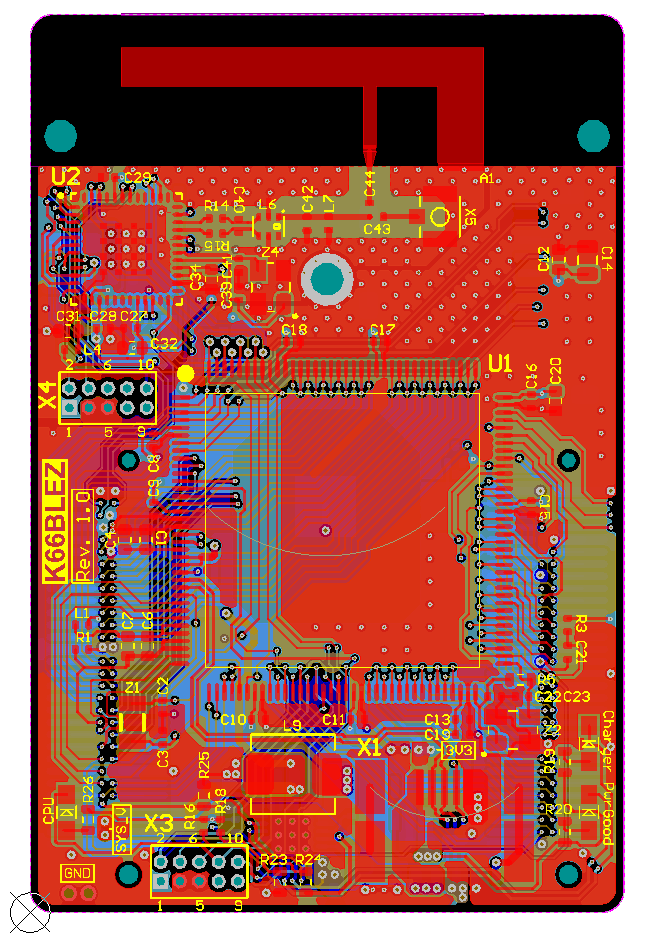
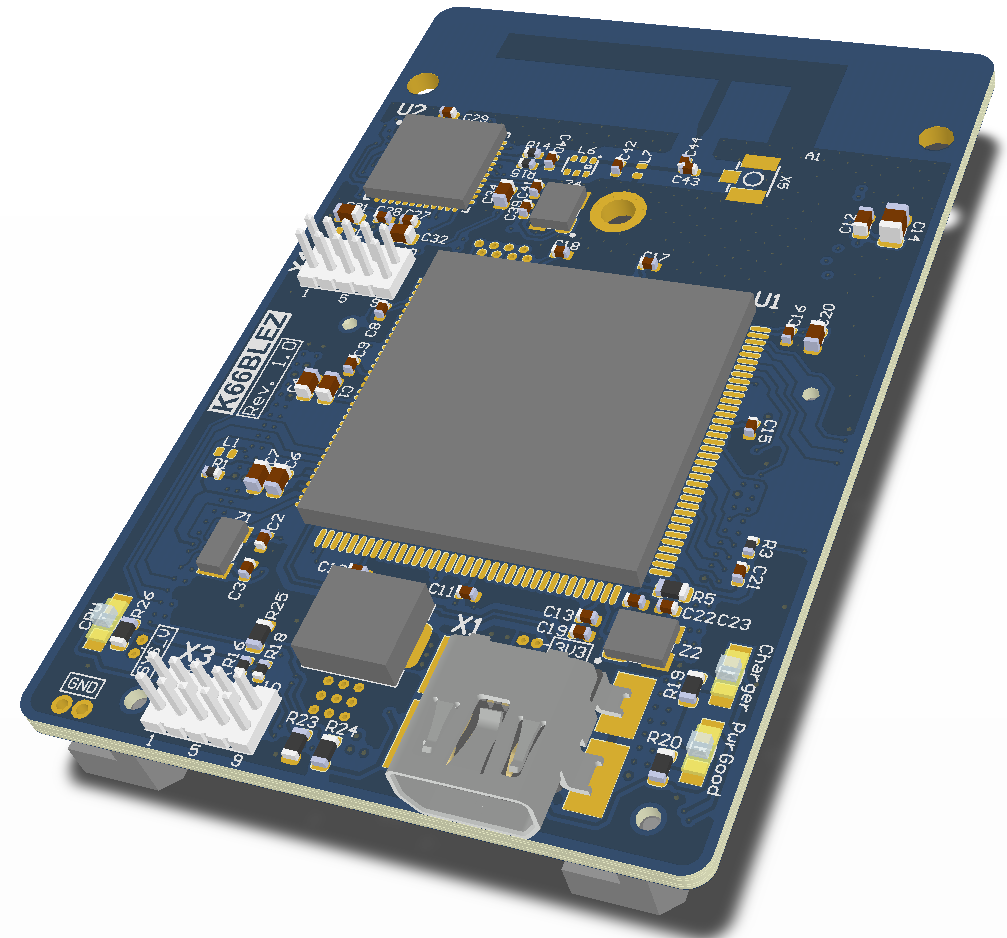
C (3D) Altium Designer.
c .
( )
| Representación de un elemento de circuito de módulo en el entorno de Altium Designer

(haga clic para ampliar)
|
Diagrama del módulo K66BLEZ1.
La mayoría de las salidas del microcontrolador MK66FN2M0VLQ18 están conectadas a dos conectores externos. Los conectores se seleccionan para que sea conveniente conectar y desconectar el módulo de la placa base.La alimentación a la placa se conecta mediante un conector USB o mediante los conectores de expansión X6, X7. El microcircuito del cargador BQ24296RGET proporciona una carga autónoma confiable de una batería de litio desde USB con control de corriente, voltaje y temperatura de la batería.El orden de lanzamiento de la placa en funcionamiento.
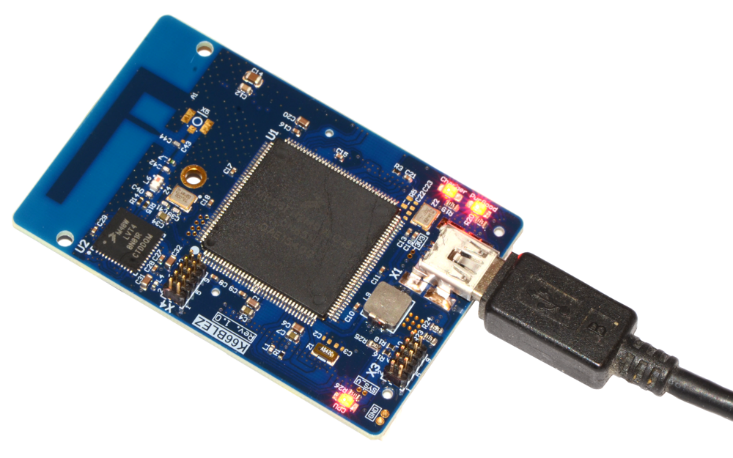
Primer paso Fuente de alimentación al módulo.
La energía se suministra conectando un cable USB. El consumo de corriente no excede los 100 mA, por lo tanto, cualquier interfaz de host USB de la computadora es adecuada. Si bien no hay ningún programa en el microcontrolador, la computadora no reacciona de ninguna manera al conectar el módulo a través de USB.Pero en el módulo, el LED PwrGood debería encenderse. El LED del cargador debería parpadear, lo que indica que la batería no está conectada. El LED "CPU" está programado, por lo tanto también está apagado.Paso dos Conectar un adaptador JTAG / SWD y verificar la funcionalidad de los canales SWD.
Los microcontroladores en la placa tienen conectores separados para conectar los adaptadores de depuración a través de la interfaz SWD . el microcontrolador K66 permite una conexión SWD de 3 hilos con una señal SWO (conector X3), y el microcontrolador MKW40 solo permite una conexión de 2 hilos (conector X4). Pero esto no impone restricciones al adaptador de depuración, y puede ser lo mismo para ambos microcontroladores.Para la depuración, uso el adaptador J-Link . Depuración de conectores en el módulo con un paso de 1,27 mm. Por lo tanto, tuve que hacer un adaptador especial desde el conector del adaptador estándar al conector del módulo como se muestra en la foto a continuación.
(Haga clic para ampliar)Aunque el adaptador J-Linky es el mejor en su clase, pero puede usar depuradores más baratos para la depuración, por ejemplo, ST-Link .Para probar el rendimiento de los canales de depuración y programación, utilizo una utilidad de Segger JFlash .Esta utilidad le permite ver el estado de todas las áreas de la memoria del chip, probar la velocidad de la interfaz y programar la memoria flash de los chips.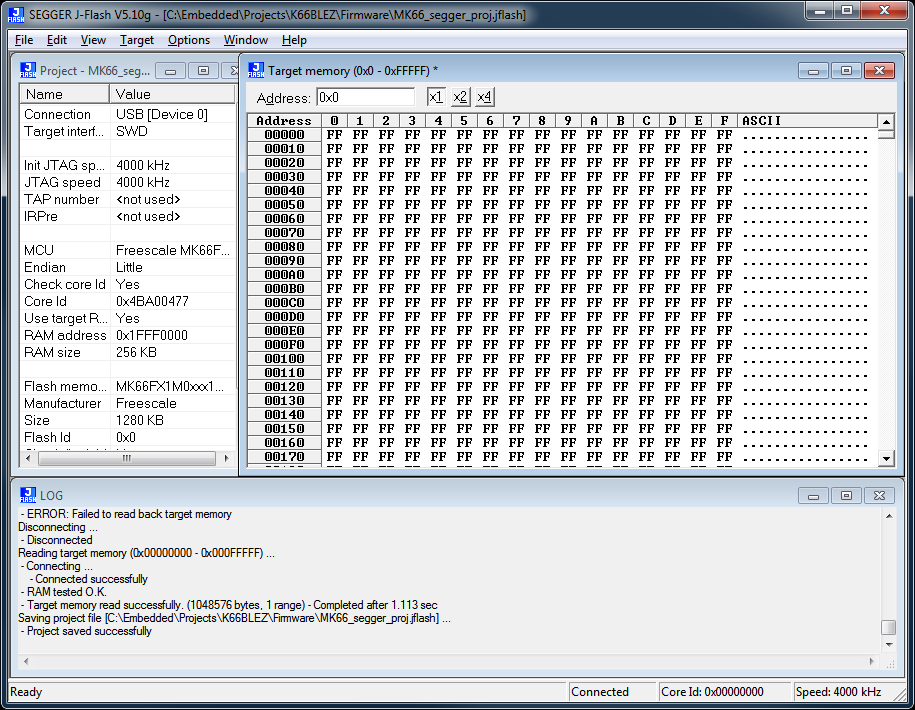
(Haga clic para ampliar)
(Haga clic para ampliar)Utilizando JFlash, pude conectar y verificar ambos chips en el módulo.Paso tres Probar el primer programa para el microcontrolador K66
Sin embargo, el primer programa no será Hello Word o incluso un LED parpadeante.Como primera prueba, seleccionamos inmediatamente el emulador de unidad externa a través de USB y el emulador de videocámara USB .Esto es posible porque el diagrama del módulo repite el esquema de la placa de depuración FRDM-K66F de muchas maneras,pero primero tenía que descargar el SDK con programas de muestra.Se crea un SDK para la placa mediante una herramienta especial en línea en el sitio web de NXP.com en http://kex.freescale.com/en/summary?cas_auth=1 (para esto deberá registrarse en el sitio)En el diálogo, seleccione el microcontrolador MK66FN2M0xxx18
El cuadro de diálogo se verá como el que se muestra a continuación: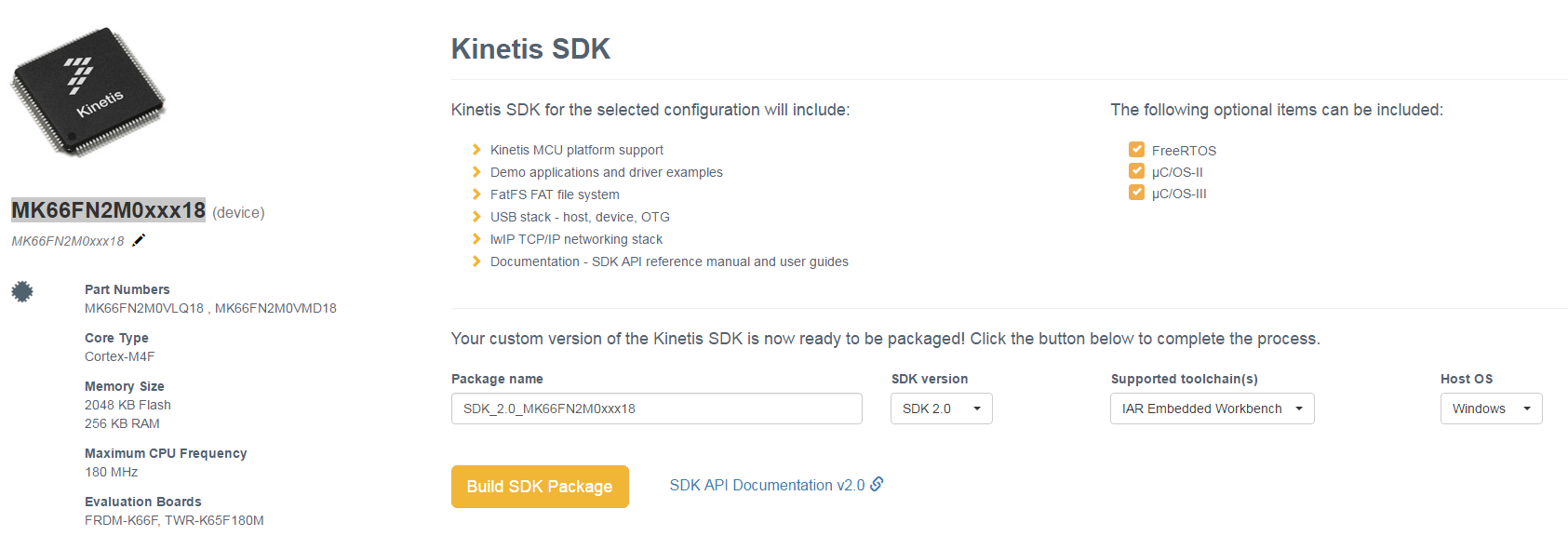
(Haga clic para ampliar)Debe determinar de inmediato el entorno de desarrollo en el que se compilará el SDK. Puede elegir algo uno de la lista o todos a la vez. La lista incluye tanto IDE comerciales como gratuitos: tradicionalmente elijo IAR . Mi investigación reciente sobre la selección del compilador ha demostrado una vez más que IAR todavía está fuera de competencia, de todos modos para ARM Cortex-M4 .El SDK se creará con aplicaciones de muestra integradas y pruebas periféricas para las placas frdmk66f y twrk65f180m . Casi todos los ejemplos de la placa frdmk66f también son adecuados para nuestra placa K66BLEZ1. Dado que los resonadores de cuarzo en estas placas tienen la misma frecuencia, el K66BLEZ1 tiene la misma tarjeta SD y la misma interfaz USB HS.Se probaron ejemplos: usb _ dispositivo _ cdc _ vcom , usb _ dispositivo _ cdc _ vcom _ lite , usb _ dispositivo _ msc _ sdcard , usb _ dispositivo _ video _ virtual _ cámara .Escribir en la tarjeta SD en usb _ ejemplodispositivo _ msc _ tarjeta sd era bastante baja - 200 KB / s, lectura - 1 MB / s.En el ejemplo usb _ dispositivo _ video _ virtual _ cámara , se utilizó el programa PotPlayer x64 para ver el video. A continuación se muestra una captura de pantalla del video incrustado en el microcontrolador.
tradicionalmente elijo IAR . Mi investigación reciente sobre la selección del compilador ha demostrado una vez más que IAR todavía está fuera de competencia, de todos modos para ARM Cortex-M4 .El SDK se creará con aplicaciones de muestra integradas y pruebas periféricas para las placas frdmk66f y twrk65f180m . Casi todos los ejemplos de la placa frdmk66f también son adecuados para nuestra placa K66BLEZ1. Dado que los resonadores de cuarzo en estas placas tienen la misma frecuencia, el K66BLEZ1 tiene la misma tarjeta SD y la misma interfaz USB HS.Se probaron ejemplos: usb _ dispositivo _ cdc _ vcom , usb _ dispositivo _ cdc _ vcom _ lite , usb _ dispositivo _ msc _ sdcard , usb _ dispositivo _ video _ virtual _ cámara .Escribir en la tarjeta SD en usb _ ejemplodispositivo _ msc _ tarjeta sd era bastante baja - 200 KB / s, lectura - 1 MB / s.En el ejemplo usb _ dispositivo _ video _ virtual _ cámara , se utilizó el programa PotPlayer x64 para ver el video. A continuación se muestra una captura de pantalla del video incrustado en el microcontrolador.
(Click para ampliar)Total
El tablero mostró un rendimiento confiable. La interfaz USB ha sido probada a una velocidad máxima de 480 Mbps. Todos los controladores USB en el lado de la PC también son funcionales. Los mecanismos de depuración de ambos procesadores funcionan sin fallas, incluyendo SWD, rastreo y puerto COM virtual. Continuarán las pruebas en futuros artículos.Todos los materiales relacionados con este proyecto se almacenan aquí : https://github.com/Indemsys/K66BLEZ1Source: https://habr.com/ru/post/es392839/
All Articles