Tractor no tripulado probado en los campos de Rusia
 La compañía rusa Cognitive Technologies realizó las primeras pruebas de tractores no tripulados con un sistema de visión por computadora de diseño propio en Tatarstán. Está previsto que el complejo de hardware y software se instale en el futuro no solo en tractores, sino también en otros equipos agrícolas: cosechadoras, sembradoras, etc., escribe Izvestia.Gracias a los vehículos no tripulados y los sistemas de visión por computadora, las granjas rusas podrán aumentar significativamente su rentabilidad, porque ahora los equipos caros se usan de manera ineficiente. Por ejemplo, la cosechadora trabaja en promedio seis horas al día, y el resto del tiempo está inactiva. Los tractores y cosechadoras no tripuladas trabajarán en el campo día y noche, las 24 horas del día. No se evitarán debido a las malas condiciones de visibilidad, la lluvia o la niebla, e incluso en la oscuridad total, un tractor no tripulado puede cortar el césped o recoger papas con la misma eficacia que durante el día.El equipo agrícola no tripulado en Rusia será promovido por una nueva compañía agrícola, que Cognitive Technologies crea con el fabricante de equipos agrícolas Rostselmash y la granja agrícola Soyuz-Agro sobre la base de la zona económica especial de Innopolis.En la oscuridad total, para sistemas no tripulados, puede usar cámaras de visión nocturna, pero es más efectivo usar lidas junto con un mapa premarcado del territorio, que se encuentra en la lista de la computadora de navegación del tractor. Colegas estadounidenses probaron recientemente un sistema de vehículos automotores no tripulados en completa oscuridad , y determinaron que un lidar con un navegador que controla un automóvil en la oscuridad es mucho más seguro que un conductor humano.Durante la prueba del Ford no tripulado en un campo de entrenamiento en Arizona, se hizo un mapa 3D del área, y en la oscuridad, el lidar con pulsos láser (2.8 millones de pulsos por segundo) allanó el camino, como si sondease el camino con orientación al mapa 3D.
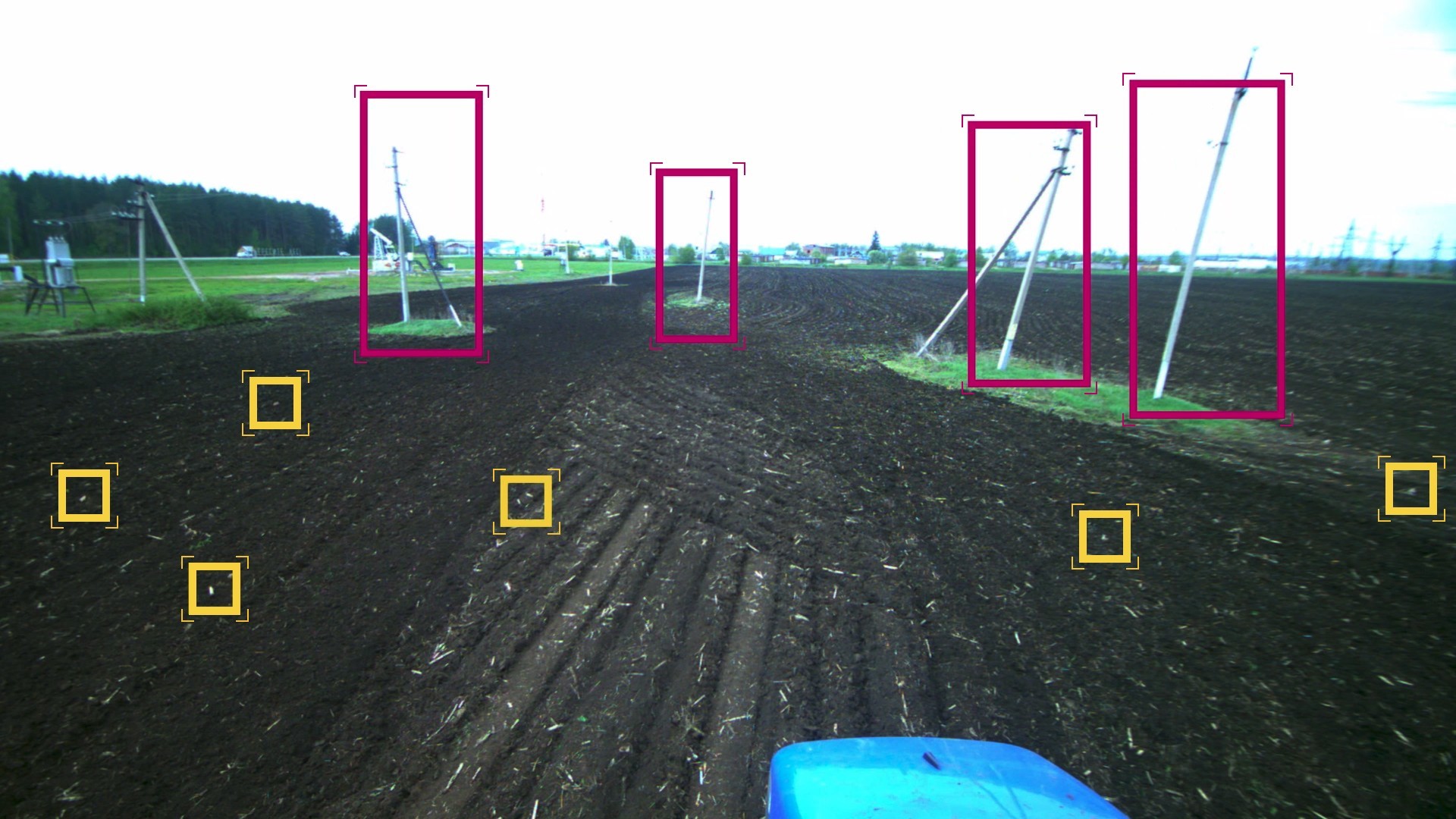
La compañía rusa Cognitive Technologies realizó las primeras pruebas de tractores no tripulados con un sistema de visión por computadora de diseño propio en Tatarstán. Está previsto que el complejo de hardware y software se instale en el futuro no solo en tractores, sino también en otros equipos agrícolas: cosechadoras, sembradoras, etc., escribe Izvestia.Gracias a los vehículos no tripulados y los sistemas de visión por computadora, las granjas rusas podrán aumentar significativamente su rentabilidad, porque ahora los equipos caros se usan de manera ineficiente. Por ejemplo, la cosechadora trabaja en promedio seis horas al día, y el resto del tiempo está inactiva. Los tractores y cosechadoras no tripuladas trabajarán en el campo día y noche, las 24 horas del día. No se evitarán debido a las malas condiciones de visibilidad, la lluvia o la niebla, e incluso en la oscuridad total, un tractor no tripulado puede cortar el césped o recoger papas con la misma eficacia que durante el día.El equipo agrícola no tripulado en Rusia será promovido por una nueva compañía agrícola, que Cognitive Technologies crea con el fabricante de equipos agrícolas Rostselmash y la granja agrícola Soyuz-Agro sobre la base de la zona económica especial de Innopolis.En la oscuridad total, para sistemas no tripulados, puede usar cámaras de visión nocturna, pero es más efectivo usar lidas junto con un mapa premarcado del territorio, que se encuentra en la lista de la computadora de navegación del tractor. Colegas estadounidenses probaron recientemente un sistema de vehículos automotores no tripulados en completa oscuridad , y determinaron que un lidar con un navegador que controla un automóvil en la oscuridad es mucho más seguro que un conductor humano.Durante la prueba del Ford no tripulado en un campo de entrenamiento en Arizona, se hizo un mapa 3D del área, y en la oscuridad, el lidar con pulsos láser (2.8 millones de pulsos por segundo) allanó el camino, como si sondease el camino con orientación al mapa 3D. El tractor ruso aún no está planeado para ser equipado con LIDAR, ya que esto aumentará significativamente su costo. Por el momento, según los desarrolladores, el costo del complejo de software y hardware de visión no tripulada no es más del 15% del costo del tractor. Para las granjas y granjas colectivas rusas, este es un margen aceptable. Si coloca un lidar completo en el tractor, el costo del equipo aumentará significativamente.Los tractores de computadora se instalarán en tractores rusos, incluido un par estéreo, un sistema de dos cámaras de video que filman videos con resolución Full HD, es decir, 1920x1080 píxeles.Además de las cámaras de video, el tractor no tripulado ruso incluye sensores de navegación e inercia GLONASS y GPS y una unidad de computación (computadora)."El sistema de visión por computadora permite la detección de alta precisión de objetos peligrosos, su tamaño y coordenadas para mapas de alta precisión", dice Olga Uskova, presidenta de Cognitive Technologies. "Gracias al conocimiento preciso de la posición de los objetos en el campo, es posible eliminar muchos de ellos incluso antes de la cosecha, cuando pueden representar una amenaza real para los elementos mecánicos de la maquinaria agrícola".Se dibuja un mapa digital del campo y se le aplican objetos circundantes (postes, piedras y otros artefactos) durante las operaciones de siembra previa, como fertilización y desgarrado. La operación se lleva a cabo en la primavera, cuando el área sembrada no se siembra, de modo que el sistema de visión por computadora detecta bien todos los artefactos. Según estos mapas digitales, el tractor será guiado en verano y otoño, durante la cosecha. Intentará rodear objetos que no pudieron ser retirados del campo en la primavera.Los desarrolladores confían en que los sensores del vehículo y el sistema de visión por computadora podrán detectar incluso aquellos obstáculos que no están en el mapa. Se afirma que el sistema reconoce objetos que varían en tamaño desde 10-15 cm a una distancia de 15-20 m. Todo lo demás no es peligroso si se instala una trampa de piedra en el tractor.
El tractor ruso aún no está planeado para ser equipado con LIDAR, ya que esto aumentará significativamente su costo. Por el momento, según los desarrolladores, el costo del complejo de software y hardware de visión no tripulada no es más del 15% del costo del tractor. Para las granjas y granjas colectivas rusas, este es un margen aceptable. Si coloca un lidar completo en el tractor, el costo del equipo aumentará significativamente.Los tractores de computadora se instalarán en tractores rusos, incluido un par estéreo, un sistema de dos cámaras de video que filman videos con resolución Full HD, es decir, 1920x1080 píxeles.Además de las cámaras de video, el tractor no tripulado ruso incluye sensores de navegación e inercia GLONASS y GPS y una unidad de computación (computadora)."El sistema de visión por computadora permite la detección de alta precisión de objetos peligrosos, su tamaño y coordenadas para mapas de alta precisión", dice Olga Uskova, presidenta de Cognitive Technologies. "Gracias al conocimiento preciso de la posición de los objetos en el campo, es posible eliminar muchos de ellos incluso antes de la cosecha, cuando pueden representar una amenaza real para los elementos mecánicos de la maquinaria agrícola".Se dibuja un mapa digital del campo y se le aplican objetos circundantes (postes, piedras y otros artefactos) durante las operaciones de siembra previa, como fertilización y desgarrado. La operación se lleva a cabo en la primavera, cuando el área sembrada no se siembra, de modo que el sistema de visión por computadora detecta bien todos los artefactos. Según estos mapas digitales, el tractor será guiado en verano y otoño, durante la cosecha. Intentará rodear objetos que no pudieron ser retirados del campo en la primavera.Los desarrolladores confían en que los sensores del vehículo y el sistema de visión por computadora podrán detectar incluso aquellos obstáculos que no están en el mapa. Se afirma que el sistema reconoce objetos que varían en tamaño desde 10-15 cm a una distancia de 15-20 m. Todo lo demás no es peligroso si se instala una trampa de piedra en el tractor. Prueba de untractor de visión artificial de Cognitive Technologies La prueba de un tractor no tripulado continuará durante aproximadamente un año y medio. Según Olga Uskova, esta vez es suficiente para llevar el sistema de visión por computadora a la etapa de uso industrial y ponerlo en funcionamiento comercial. Los sistemas de hardware y software se venderán a granjas en Rusia, así como a países cercanos y lejanos en el extranjero.Los desarrollos experimentales en esta área no son solo en Rusia. Por ejemplo, el Ministro de Agricultura japonés planteó recientemente el tema del cambio a la tecnología robótica en la agricultura debido al envejecimiento de la población, incluidos los agricultores.La edad promedio de los agricultores japoneses es de 67 años, dos tercios de ellos mayores de 65 años. En Rusia, todavía no existe un problema de envejecimiento debido a la baja esperanza de vida, pero puede aparecer con el tiempo.Los tractores no tripulados están listos para producir la corporación japonesa Kubota.
Prueba de untractor de visión artificial de Cognitive Technologies La prueba de un tractor no tripulado continuará durante aproximadamente un año y medio. Según Olga Uskova, esta vez es suficiente para llevar el sistema de visión por computadora a la etapa de uso industrial y ponerlo en funcionamiento comercial. Los sistemas de hardware y software se venderán a granjas en Rusia, así como a países cercanos y lejanos en el extranjero.Los desarrollos experimentales en esta área no son solo en Rusia. Por ejemplo, el Ministro de Agricultura japonés planteó recientemente el tema del cambio a la tecnología robótica en la agricultura debido al envejecimiento de la población, incluidos los agricultores.La edad promedio de los agricultores japoneses es de 67 años, dos tercios de ellos mayores de 65 años. En Rusia, todavía no existe un problema de envejecimiento debido a la baja esperanza de vida, pero puede aparecer con el tiempo.Los tractores no tripulados están listos para producir la corporación japonesa Kubota. El prototipo de un tractor Kubota autónomo con lidar. También se fabricanpequeños tractores no tripulados en Bielorrusia.. Seguramente el sistema de visión por computadora ruso también se puede instalar en los tractores bielorrusos populares producidos por la planta de tractores de Minsk.En la imaginación de los desarrolladores rusos, en el futuro, la agricultura en Rusia es la siguiente: “El trabajo de todos los equipos agrícolas inteligentes será controlado por un número mínimo de personas del centro de control, desde donde se controlarán todas las máquinas. Si es necesario, podrá configurar el programa y el tiempo de funcionamiento de los tractores, y no tendrá que estar constantemente en la consola ”, dice Olga Usova.En general, aproximadamente como lo predijo el escritor Nikolai Nosov en la obra de ciencia ficción Dunno in the Solar City.
El prototipo de un tractor Kubota autónomo con lidar. También se fabricanpequeños tractores no tripulados en Bielorrusia.. Seguramente el sistema de visión por computadora ruso también se puede instalar en los tractores bielorrusos populares producidos por la planta de tractores de Minsk.En la imaginación de los desarrolladores rusos, en el futuro, la agricultura en Rusia es la siguiente: “El trabajo de todos los equipos agrícolas inteligentes será controlado por un número mínimo de personas del centro de control, desde donde se controlarán todas las máquinas. Si es necesario, podrá configurar el programa y el tiempo de funcionamiento de los tractores, y no tendrá que estar constantemente en la consola ”, dice Olga Usova.En general, aproximadamente como lo predijo el escritor Nikolai Nosov en la obra de ciencia ficción Dunno in the Solar City. Expertos independientes creen que un futuro totalmente automatizado en la agricultura aún no funcionará. Al volante del vehículo debe estar una persona que controle el funcionamiento de la automatización y esté lista para tomar el control en caso de emergencia.Por cierto, Cognitive Technologies habló con más detalle sobre sus desarrollos en visión artificial en el blog corporativo en Habrahabr. En 2014, como parte de un proyecto conjunto en el Departamento de Tecnologías Cognitivas del Instituto de Física y Tecnología de Moscú, se desarrolló un automóvil robot que "procesa en tiempo real el flujo de video, reconoce la escena circundante, detecta objetos y genera una acción de control dirigida a resolver la tarea". El robot tenía la tarea de perseguir la bola roja y empujarla con el parachoques.El video fue filmado durante un informe en la conferencia de otoño de jóvenes científicos en el Instituto de Física y Tecnología de Moscú, justo en el pasillo del edificio principal.
Expertos independientes creen que un futuro totalmente automatizado en la agricultura aún no funcionará. Al volante del vehículo debe estar una persona que controle el funcionamiento de la automatización y esté lista para tomar el control en caso de emergencia.Por cierto, Cognitive Technologies habló con más detalle sobre sus desarrollos en visión artificial en el blog corporativo en Habrahabr. En 2014, como parte de un proyecto conjunto en el Departamento de Tecnologías Cognitivas del Instituto de Física y Tecnología de Moscú, se desarrolló un automóvil robot que "procesa en tiempo real el flujo de video, reconoce la escena circundante, detecta objetos y genera una acción de control dirigida a resolver la tarea". El robot tenía la tarea de perseguir la bola roja y empujarla con el parachoques.El video fue filmado durante un informe en la conferencia de otoño de jóvenes científicos en el Instituto de Física y Tecnología de Moscú, justo en el pasillo del edificio principal.Source: https://habr.com/ru/post/es395169/
All Articles