“El origen del proyecto. Parte 1.1. Cómo armé un robot de telepresencia en una distancia entre ejes ". Tecnología de resistencia
Proyecto: Endurance Robots & Lasers Technologies.Artículo No. 1. “El origen del proyecto. Parte 1.1. Cómo armé un robot de telepresencia en una distancia entre ejes ".Para 2015, los miembros de nuestro futuro equipo lograron ganar suficiente dinero para arriesgar su tiempo a largo plazo (determinaron un horizonte de planificación de 1 año). Y decidimos organizar una startup. Participar en ventas? ¡Nooo, startup tecnológica! A saber, el desarrollo de robots y láseres de estado sólido con una potencia del orden de 1-10 vatios.Inmediatamente me gustó la idea de estar en el momento adecuado en un lugar interesante durante miles de kilómetros y aún así me gusta. Todos amamos la transmisión en vivo. Y gracias al robot, también controlo la dirección de mi mirada, mi paradero. Por lo tanto, en 2015, cuando comenzamos el proyecto Endurance Robots, comencé a desarrollar un robot de telepresencia sobre ruedas. La distancia entre ejes le permitirá moverse por la habitación o en la calle, y la telepresencia asegurará la relevancia de lo que sucede en la situación. El objetivo final: realidad virtual completa, un robot controlado por una persona con la ayuda de las gafas Oculus rift. Fuego!))Para empezar, busqué en Google y estudié las ofertas disponibles en el mercado internacional: PadBot (China), BotEyes (Rusia), Double Robotics (EE. UU.), Webot (Rusia), OrigiBot (EE. UU.), Oculus (Canadá), Anybot (EE. UU.), RBOT Synergy (Rusia), y compiló una tabla de características comparativas de robots. Los robots diferían en su funcionalidad: la capacidad de tomar objetos con un manipulador (una lata de cerveza del refrigerador :), superar grandes obstáculos, cargar de forma autónoma, etc. Naturalmente, el precio flotaba y oscilaba entre $ 1,000 y $ 10,000. Posteriormente, me di cuenta de que los dispositivos de bajo costo de hasta $ 5,000 son plataformas robóticas controladas por un operador humano, pero no robots autónomos, capaces de tomar decisiones de forma independiente en un entorno cambiante: acercarse a un obstáculo, viajar a lo largo de una ruta desde el punto A al punto B, reconocimiento de comandos de voz.Nuestro equipo de Endurance Robots decidió ingresar al mercado de plataformas de clase económica de hasta $ 2000. En base a la tabla de características comparativas, determiné las características del dispositivo que deben lograrse en primer lugar, a saber: duración de la batería (de 8 horas, un día entero de trabajo), superación de obstáculos (hasta 3,5 centímetros de alto, umbral de la puerta delantera), transmisión confiable controle comandos a través de Internet, comunicaciones de audio y video de alta calidad. Una participante en el proyecto insistió en hacer un cuerpo de robot con un maniquí femenino e instalar una tableta entre los senos. Incluso compramos un torso usado sin brazos, piernas y cabeza por $ 2 (un nuevo maniquí completo cuesta ~ $ 100), pero debido a un presupuesto limitado, esta idea finalmente murió.que debe lograrse en primer lugar, a saber: duración de la batería (de 8 horas, un día entero de trabajo), superación de obstáculos (hasta 3,5 centímetros de alto, umbral de la puerta principal), transmisión confiable de comandos de control a través de Internet, video de alta calidad y comunicación de audio Una participante en el proyecto insistió en hacer un cuerpo de robot con un maniquí femenino e instalar una tableta entre los senos. Incluso compramos un torso usado sin brazos, piernas y cabeza por $ 2 (un nuevo maniquí completo cuesta ~ $ 100), pero debido a un presupuesto limitado, esta idea finalmente murió.que debe lograrse en primer lugar, a saber: duración de la batería (de 8 horas, un día entero de trabajo), superación de obstáculos (hasta 3,5 centímetros de alto, umbral de la puerta principal), transmisión confiable de comandos de control a través de Internet, video de alta calidad y comunicación de audio Una participante en el proyecto insistió en hacer un cuerpo de robot con un maniquí femenino e instalar una tableta entre los senos. Incluso compramos un torso usado sin brazos, piernas y cabeza por $ 2 (un nuevo maniquí completo cuesta ~ $ 100), pero debido a un presupuesto limitado, esta idea finalmente murió.Una participante en el proyecto insistió en hacer un cuerpo de robot con un maniquí femenino e instalar una tableta entre los senos. Incluso compramos un torso usado sin brazos, piernas y cabeza por $ 2 (un nuevo maniquí completo cuesta ~ $ 100), pero debido a un presupuesto limitado, esta idea finalmente murió.Una participante en el proyecto insistió en hacer un cuerpo de robot con un maniquí femenino e instalar una tableta entre los senos. Incluso compramos un torso usado sin brazos, piernas y cabeza por $ 2 (un nuevo maniquí completo cuesta ~ $ 100), pero debido a un presupuesto limitado, esta idea finalmente murió. En el curso de las pruebas de demanda, quedó claro que las personas no solo buscan una tableta con ruedas, sino una plataforma robótica que puede realizar tareas intelectuales humanas: reconocer objetos y discurso (tecnología OpenCV de código abierto), responder correctamente preguntas (AI), para superar la ruta al sujeto, capturar al sujeto y transferirlo al destino. Es decir, la distancia entre ejes no es la principal, sino una adición necesaria a lo que ofrecemos. Estratégicamente, la distancia entre ejes sigue siendo el principal factor de forma. Por analogía, una computadora portátil -> tableta. Es decir Una nueva forma es un nuevo producto.
En el curso de las pruebas de demanda, quedó claro que las personas no solo buscan una tableta con ruedas, sino una plataforma robótica que puede realizar tareas intelectuales humanas: reconocer objetos y discurso (tecnología OpenCV de código abierto), responder correctamente preguntas (AI), para superar la ruta al sujeto, capturar al sujeto y transferirlo al destino. Es decir, la distancia entre ejes no es la principal, sino una adición necesaria a lo que ofrecemos. Estratégicamente, la distancia entre ejes sigue siendo el principal factor de forma. Por analogía, una computadora portátil -> tableta. Es decir Una nueva forma es un nuevo producto. La tarea en la primera etapa es desarrollar una distancia entre ejes: económica (no más de $ 200 para producción a pequeña escala), eficiente (que se movería de manera confiable, tendría modularidad y la capacidad de reparar rápidamente), simple (similar a lo que instaló el teléfono, la aplicación descargada y el sistema funciona ), confiable (software, hardware), que en el futuro se puede mejorar. El operador debe poder enviar señales a motores eléctricos y servos a través de Internet.Entonces, PRINCIPIOS BÁSICOS de un diseño.- No se persigue la versatilidad de la plataforma a la "vehículo todo terreno". Modelo ambiental = interior. La superficie es plana (laminado, baldosas, madera, hormigón, linóleo), obstáculos de hasta 1 cm.- Prioridad en la siguiente secuencia: atractivo, ergonomía y simplicidad, movilidad.- Creación de un prototipo modelado para producción industrial.- Confiabilidad en la operación diaria (1 año)- Reemplazabilidad o complementariedad (poner un segundo altavoz o una segunda cámara es donde).- La versatilidad de los sujetadores.- Movimiento rectilíneo, no zigzags.- Ruido y vibración de menos de 10 decibelios.- Colapsibilidad y facilidad de construcción para transferir de un edificio a otro.
La tarea en la primera etapa es desarrollar una distancia entre ejes: económica (no más de $ 200 para producción a pequeña escala), eficiente (que se movería de manera confiable, tendría modularidad y la capacidad de reparar rápidamente), simple (similar a lo que instaló el teléfono, la aplicación descargada y el sistema funciona ), confiable (software, hardware), que en el futuro se puede mejorar. El operador debe poder enviar señales a motores eléctricos y servos a través de Internet.Entonces, PRINCIPIOS BÁSICOS de un diseño.- No se persigue la versatilidad de la plataforma a la "vehículo todo terreno". Modelo ambiental = interior. La superficie es plana (laminado, baldosas, madera, hormigón, linóleo), obstáculos de hasta 1 cm.- Prioridad en la siguiente secuencia: atractivo, ergonomía y simplicidad, movilidad.- Creación de un prototipo modelado para producción industrial.- Confiabilidad en la operación diaria (1 año)- Reemplazabilidad o complementariedad (poner un segundo altavoz o una segunda cámara es donde).- La versatilidad de los sujetadores.- Movimiento rectilíneo, no zigzags.- Ruido y vibración de menos de 10 decibelios.- Colapsibilidad y facilidad de construcción para transferir de un edificio a otro. CARACTERÍSTICAS TÉCNICAS de un diseño.- Velocidad máxima de hasta 3 km / h.- La altura del borde superior de la pantalla es de ~ 1.5 m. (Preferiblemente, con la posibilidad de cambiar de 1.2 ma 1.8 m).- ¿Cuántos kg hay a una altura de 180 cm? Tableta + cuna + dos servos. ¿El diseño del triciclo será estable con las baterías seleccionadas a los lados al chocar contra un obstáculo de 3.5 cm con una o dos ruedas?Y luego cayeron un millón de preguntas ... ¿Qué tamaño de ruedas? Que material
CARACTERÍSTICAS TÉCNICAS de un diseño.- Velocidad máxima de hasta 3 km / h.- La altura del borde superior de la pantalla es de ~ 1.5 m. (Preferiblemente, con la posibilidad de cambiar de 1.2 ma 1.8 m).- ¿Cuántos kg hay a una altura de 180 cm? Tableta + cuna + dos servos. ¿El diseño del triciclo será estable con las baterías seleccionadas a los lados al chocar contra un obstáculo de 3.5 cm con una o dos ruedas?Y luego cayeron un millón de preguntas ... ¿Qué tamaño de ruedas? Que material ¿Qué tipo: omni, liso, con una banda de rodadura profunda?
¿Qué tipo: omni, liso, con una banda de rodadura profunda? ¿Cuántas ruedas: tres o cuatro? ¿Cómo plantar en el eje?
¿Cuántas ruedas: tres o cuatro? ¿Cómo plantar en el eje? ¿A la caja de cambios o al eje del motor?
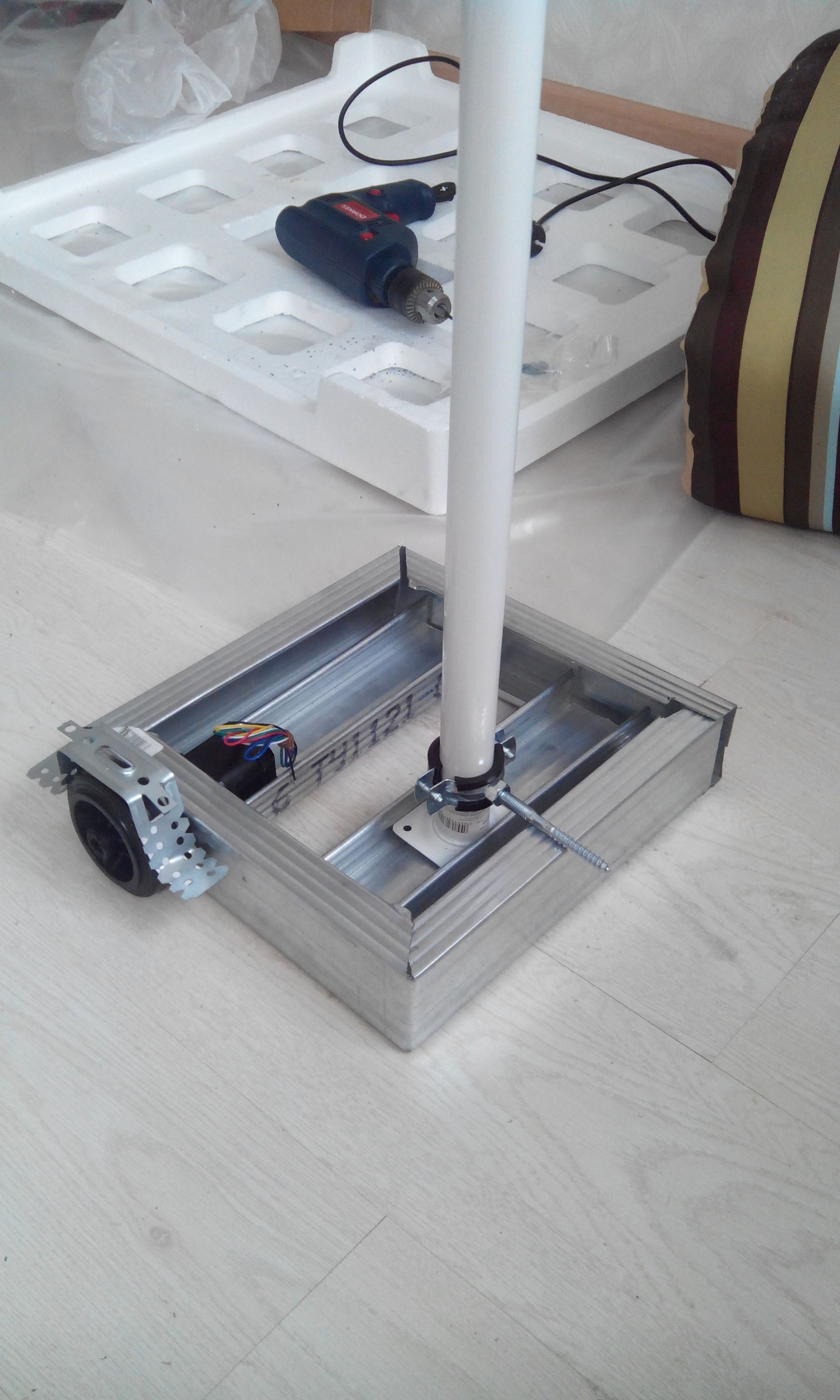
¿A la caja de cambios o al eje del motor? ¿Qué motor elegir: colector, sin escobillas, paso? ¿De qué material hacer el marco? Como resultado, hice el primer prototipo de materiales fácilmente disponibles que se venden en cualquier ferretería: 3 ruedas (dos delanteras y una giratoria), un cuadro de perfil delgado de aluminio en forma de U, tornillos y pernos autorroscantes, 2 motores paso a paso.
¿Qué motor elegir: colector, sin escobillas, paso? ¿De qué material hacer el marco? Como resultado, hice el primer prototipo de materiales fácilmente disponibles que se venden en cualquier ferretería: 3 ruedas (dos delanteras y una giratoria), un cuadro de perfil delgado de aluminio en forma de U, tornillos y pernos autorroscantes, 2 motores paso a paso.
 Lo principal es que este prototipo cumplió su misión: servir a nuestros circuitos Andrei para probar la electrónica arriba y abajo.En este artículo, describí el comienzo de nuestro largo viaje. Productos y fotografías de aficionados. Pero en las siguientes partes mostraré un enfoque más profesional:El diseño de los elementos de mecánica y electrónica, en los que nos centramos:
Lo principal es que este prototipo cumplió su misión: servir a nuestros circuitos Andrei para probar la electrónica arriba y abajo.En este artículo, describí el comienzo de nuestro largo viaje. Productos y fotografías de aficionados. Pero en las siguientes partes mostraré un enfoque más profesional:El diseño de los elementos de mecánica y electrónica, en los que nos centramos: Continuación del artículo aquí: “Continúa. Parte 1.2. Cómo armé un robot de telepresencia en una distancia entre ejes ". Tecnología de robots y láseres de resistencia
Continuación del artículo aquí: “Continúa. Parte 1.2. Cómo armé un robot de telepresencia en una distancia entre ejes ". Tecnología de robots y láseres de resistencia Source: https://habr.com/ru/post/es395507/
All Articles