
. «» (Tesla Model X , ). ADAS? ?
, , . , . , R&D .
.
— , :
, . -:
.
?
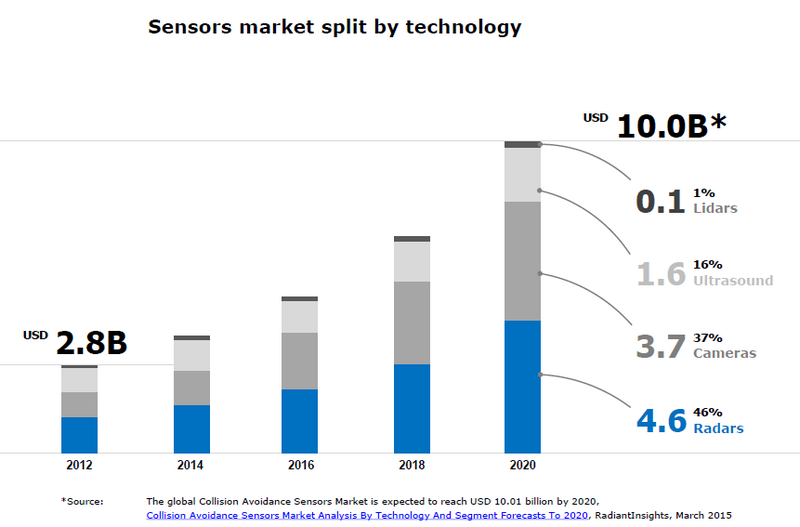
, . , 85 . ( ), , , . .
.
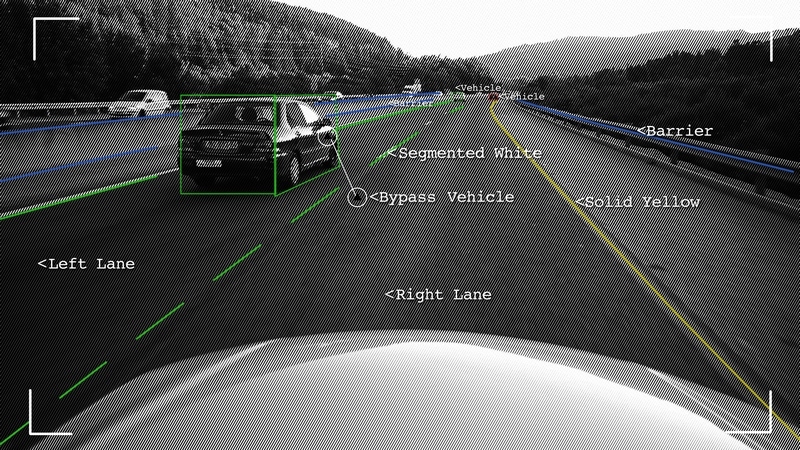
: , ( ), .
:
- .
- , «» , ( ).
- («»-«»-«»-«»-«»-«»).
- , , — .
:
- , ( ).
- , , .
- — « » .
- : , .
Intel NVIDIA Mobileye Magna International. , . , . , .
:
.

: , , , .
:
- , .
- , .
- (1/20–1/50 ) , .
- . V2I/V2V
:
- , . 1000 .
- ( ).
- .
- . , . — .
, — Bosch Global, Delphi, Smartmicro. , . 50 , ( - ) . , , . , .
:
— . .
, :
“…That said, I don’t think you need LIDAR. I think you can do this all with passive optical and then with maybe one forward RADAR… if you are driving fast into rain or snow or dust. I think that completely solves it without the use of LIDAR. I’m not a big fan of LIDAR, I don’t think it makes sense in this context.”

: , , , .
:
- , . .
:
- - .
- , — .
- .
- , —
— Velodyne LiDAR, Quanergy, Sick. , , . Bosch automotive- . . 250 , - .
: ,
:
, . , . : .

: , , .
:
- , -
- .
- , arduino.
:
- .
- .
- .
noname, , . ,
Toposens, , - .
:
, arduino . :).

: , .
:
- .
:
- ,
- .
:
, . , .
— . :
- . low-end — . — .
- ADAS . sensor fusion . , .
- , () . , , . .
Y eso no es todo. Ahora hablemos de los problemas del mundo real .