Cómo hacer un auto de carreras todo terreno con un ATV para niños
 Nada en este mundo dura para siempre, pero algunos productos chinos simplemente sorprenden con su "durabilidad". Le contaré sobre mi experiencia en la modernización de un ATV para niños.Lo que tenemos: un ATV KL-789 para niños con fallas menores, un poco de tiempo libre y el deseo de pegar un arduino sobrecargado.Lo que queremos obtener: algo que funcione durante más de un mes, preferiblemente con características de ejecución mejoradas.El ATV tiene dos motores de colector RS550 para 12V, con una velocidad del eje de 19300 rpm en ralentí, conectado a las ruedas traseras con un diámetro de ~ 30 cm a través de cajas de cambios con una relación de engranajes de ~ 131. Las matemáticas simples sugieren que la velocidad máxima de un vehículo dado debe ser 19300/131/60 * 3.14 * 0.3 = 2.31 m / so 8.3 km / h. En la práctica, viaja aproximadamente 7 km / h. Durante la selección de nuevos componentes, luché con el deseo de alcanzar la máxima velocidad y el temor de que este fuera un vehículo demasiado peligroso para los niños. Por lo tanto, se decidió que debería ir 1.5-2 veces más rápido. Además de los motores, me decepcionó:
Nada en este mundo dura para siempre, pero algunos productos chinos simplemente sorprenden con su "durabilidad". Le contaré sobre mi experiencia en la modernización de un ATV para niños.Lo que tenemos: un ATV KL-789 para niños con fallas menores, un poco de tiempo libre y el deseo de pegar un arduino sobrecargado.Lo que queremos obtener: algo que funcione durante más de un mes, preferiblemente con características de ejecución mejoradas.El ATV tiene dos motores de colector RS550 para 12V, con una velocidad del eje de 19300 rpm en ralentí, conectado a las ruedas traseras con un diámetro de ~ 30 cm a través de cajas de cambios con una relación de engranajes de ~ 131. Las matemáticas simples sugieren que la velocidad máxima de un vehículo dado debe ser 19300/131/60 * 3.14 * 0.3 = 2.31 m / so 8.3 km / h. En la práctica, viaja aproximadamente 7 km / h. Durante la selección de nuevos componentes, luché con el deseo de alcanzar la máxima velocidad y el temor de que este fuera un vehículo demasiado peligroso para los niños. Por lo tanto, se decidió que debería ir 1.5-2 veces más rápido. Además de los motores, me decepcionó:- Batería Gel 12V 10Ah, perdiendo la mayor parte de la capacidad con alta corriente de descarga
- Sistema de gestión. La primera velocidad es el pedal, los motores están conectados en serie. La segunda velocidad es la manija en el volante, los motores están conectados en paralelo. El freno es automático cuando se suelta el pedal, los devanados del motor se cierran. Este circuito conduce a un arranque demasiado brusco, falta total de rodamiento libre, el mismo freno abrupto, todo esto conduce a cargas de alta corriente (el botón del pedal se derritió durante el mes de operación) y cargas mecánicas en las cajas de engranajes y las ruedas, sin mencionar el banal, no la comodidad. conducir
- Cables de alimentación Sección 0.75-1 sq. mm, que con corrientes nominales de 20 A se calientan a una temperatura significativa
Es decir No me gustaron absolutamente todas las eléctricas. Después de una pequeña reflexión, se decidió usar:- 11.1V () 240 (, , )
- 36000 rpm 11.1V, ~40000 rpm
- 120 ( )
- - , ,
- 100
- Bluetooth ,
- / , ,
- ,
- FET , 4 ,
- Teensy 2.0,
- -
- - , , , ,
Además, para reducir el ruido de las ruedas de plástico y mejorar la comodidad de manejo, se compraron 4 llantas de 12.5 "para cochecitos de bebé, después de lo cual se sometieron a un pequeño refinamiento con un cuchillo de oficina, y luego se colocaron sobre las ruedas del ATV, y se fijaron con tornillos: cuando todo llegó, estaba monté un prototipo sobre mis rodillas, resultó que los motores incluso sin carga calientan hasta 70 grados en 3-5 minutos de operación, tuve que comprar dos enfriadores para ellos, y los reguladores, por el contrario, no se calientan incluso con los ventiladores apagados (mirando hacia adelante, tampoco se calientan en un ATV bajo carga). Porque Tenemos dos motores de dos lados diferentes, fue necesario resolver otro problema: los motores táctiles giran solo en una dirección. Inicialmente, se planeó desmontar un motor y girar el sensor 180 grados ... pero la realidad ha demostrado que esto no se puede hacer con poca sangre. Además, durante los experimentos con el sensor y los tiempos, uno de los reguladores se quemó parcialmente, como resultado, rechacé el sensor y los conecté como BC normales. El sensor en sí consta de tres sensores Hall que rastrean la posición del rotor y un sensor de temperatura. Se decidió no abandonar toda esta economía, sino conectarla a MK y usarla como un sensor de temperatura del motor, un sensor de velocidad del motor y, más tarde,conociendo la relación de transmisión, y como sensor de velocidad.La biblioteca pwmservo era un tanto desconcertante, está diseñada para controlar servos (en mi caso, reguladores) a través de un PWM de hardware, con una precisión de 1 grado, solo 180 estados, y la dirección de `` avance '' es solo la mitad del rango, es decir 90 estados. Me pareció que esto no es suficiente, tuve que editar la biblioteca en detrimento del arduin multiplataforma (resultó solo para controladores con 16 MHz), el resultado fue 1000 estados en cada dirección (la unidad tiene una duración PWM de 0.5 μs, PWM de 1 a 2 ms).Después de que el trabajo "en la rodilla" fue más o menos depurado, toda esta economía se instaló en una bicicleta quad:Porque la potencia resultó ser más de 500 W, fue necesario limitar la tasa de aumento de gas, si gira bruscamente el gas al máximo, la potencia aumentará sin problemas y alcanzará su máximo en aproximadamente 3 segundos. Estoy seguro de que sin esto se produciría un efecto de volcado instantáneo.En general, aquí hay una grabación de video de telemetría desde la pantalla del teléfono, todo es visible allí, solo debido al sensor de velocidad ligeramente doblado en el motor izquierdo (columna verde izquierda) los datos de velocidad están ligeramente subestimados, la velocidad máxima alcanzada con baterías nuevas es de 18 km / hLos valores de las columnas: azul - temperatura del motor en grados, verde - velocidad del motor en rpm, naranja - potencia suministrada a los motores en números convencionales de 0 a 1000, gris - posición de la palanca de gas.Y así es como va:No me arrastré lejos ... está estancado, pero conduje en el ATV y, a juzgar por la telemetría, a él no le importa quién está en la cimaEn el primer video al comienzo, se escucha un crujido. En la primera noche, las cajas de cambios estaban completamente fuera de servicio. El problema resultó ser que las cajas de engranajes consisten en engranajes de nylon que giran en un eje de acero de 9 mm sin cojinetes, por lo que la fuerza de fricción de los engranajes era tan grande que el centro de una caja de engranajes simplemente se derritió y se perdió la alineación. En otro engranaje, el engranaje se soldaba al eje, y el eje comenzó a girar en el cuerpo y a derretirse, como resultado de lo cual el engranaje también perdió alineación.Para resolver este problema, necesitábamos:Los ejes nuevos eran de 5 mm, así que tuve que imprimir en una impresora 3D con un diámetro externo de 9 mm (como los ejes viejos), y el interior de 5 mm, para instalar los nuevos ejes en la caja de engranajes anterior, se perforaron agujeros de 11 mm en los engranajes con una profundidad de 5 mm con ambos lados (asientos de apoyo). Los engranajes ahora están montados sobre cojinetes, y también están lubricados abundantemente con litol, y durante más de seis meses todo ha funcionado perfectamente en cualquier condición:Pero no me detengo allí, el siguiente paso son los engranajes personalizados de la caja de cambios, para aumentar la velocidad a 25-30 km / h.
cuando todo llegó, estaba monté un prototipo sobre mis rodillas, resultó que los motores incluso sin carga calientan hasta 70 grados en 3-5 minutos de operación, tuve que comprar dos enfriadores para ellos, y los reguladores, por el contrario, no se calientan incluso con los ventiladores apagados (mirando hacia adelante, tampoco se calientan en un ATV bajo carga). Porque Tenemos dos motores de dos lados diferentes, fue necesario resolver otro problema: los motores táctiles giran solo en una dirección. Inicialmente, se planeó desmontar un motor y girar el sensor 180 grados ... pero la realidad ha demostrado que esto no se puede hacer con poca sangre. Además, durante los experimentos con el sensor y los tiempos, uno de los reguladores se quemó parcialmente, como resultado, rechacé el sensor y los conecté como BC normales. El sensor en sí consta de tres sensores Hall que rastrean la posición del rotor y un sensor de temperatura. Se decidió no abandonar toda esta economía, sino conectarla a MK y usarla como un sensor de temperatura del motor, un sensor de velocidad del motor y, más tarde,conociendo la relación de transmisión, y como sensor de velocidad.La biblioteca pwmservo era un tanto desconcertante, está diseñada para controlar servos (en mi caso, reguladores) a través de un PWM de hardware, con una precisión de 1 grado, solo 180 estados, y la dirección de `` avance '' es solo la mitad del rango, es decir 90 estados. Me pareció que esto no es suficiente, tuve que editar la biblioteca en detrimento del arduin multiplataforma (resultó solo para controladores con 16 MHz), el resultado fue 1000 estados en cada dirección (la unidad tiene una duración PWM de 0.5 μs, PWM de 1 a 2 ms).Después de que el trabajo "en la rodilla" fue más o menos depurado, toda esta economía se instaló en una bicicleta quad:Porque la potencia resultó ser más de 500 W, fue necesario limitar la tasa de aumento de gas, si gira bruscamente el gas al máximo, la potencia aumentará sin problemas y alcanzará su máximo en aproximadamente 3 segundos. Estoy seguro de que sin esto se produciría un efecto de volcado instantáneo.En general, aquí hay una grabación de video de telemetría desde la pantalla del teléfono, todo es visible allí, solo debido al sensor de velocidad ligeramente doblado en el motor izquierdo (columna verde izquierda) los datos de velocidad están ligeramente subestimados, la velocidad máxima alcanzada con baterías nuevas es de 18 km / hLos valores de las columnas: azul - temperatura del motor en grados, verde - velocidad del motor en rpm, naranja - potencia suministrada a los motores en números convencionales de 0 a 1000, gris - posición de la palanca de gas.Y así es como va:No me arrastré lejos ... está estancado, pero conduje en el ATV y, a juzgar por la telemetría, a él no le importa quién está en la cimaEn el primer video al comienzo, se escucha un crujido. En la primera noche, las cajas de cambios estaban completamente fuera de servicio. El problema resultó ser que las cajas de engranajes consisten en engranajes de nylon que giran en un eje de acero de 9 mm sin cojinetes, por lo que la fuerza de fricción de los engranajes era tan grande que el centro de una caja de engranajes simplemente se derritió y se perdió la alineación. En otro engranaje, el engranaje se soldaba al eje, y el eje comenzó a girar en el cuerpo y a derretirse, como resultado de lo cual el engranaje también perdió alineación.Para resolver este problema, necesitábamos:Los ejes nuevos eran de 5 mm, así que tuve que imprimir en una impresora 3D con un diámetro externo de 9 mm (como los ejes viejos), y el interior de 5 mm, para instalar los nuevos ejes en la caja de engranajes anterior, se perforaron agujeros de 11 mm en los engranajes con una profundidad de 5 mm con ambos lados (asientos de apoyo). Los engranajes ahora están montados sobre cojinetes, y también están lubricados abundantemente con litol, y durante más de seis meses todo ha funcionado perfectamente en cualquier condición:Pero no me detengo allí, el siguiente paso son los engranajes personalizados de la caja de cambios, para aumentar la velocidad a 25-30 km / h.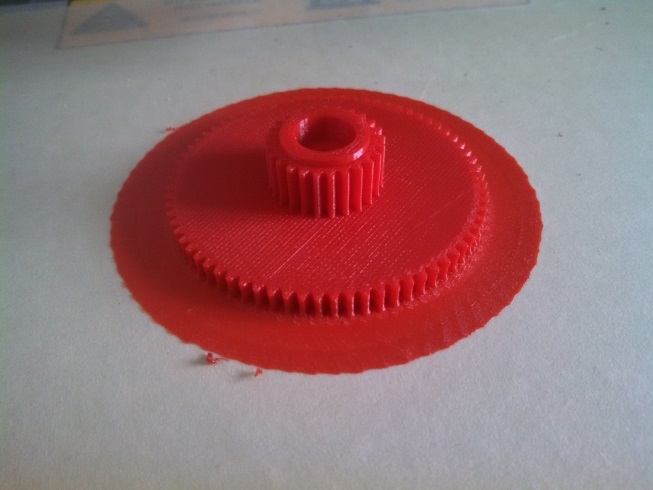 Los niños aprenden muy rápido y ya se las arreglan perfectamente para entrar en un giro de 90 grados con un poco de frenado, y luego con un gas fuerte a la salida del giro.Un boceto, una biblioteca pwmservo modificada, pinount se puede descargar aquí , todo esto está en forma de borrador, hay un montón de código inacabado y de depuración en el código, por lo que me disculpo de antemano.
Los niños aprenden muy rápido y ya se las arreglan perfectamente para entrar en un giro de 90 grados con un poco de frenado, y luego con un gas fuerte a la salida del giro.Un boceto, una biblioteca pwmservo modificada, pinount se puede descargar aquí , todo esto está en forma de borrador, hay un montón de código inacabado y de depuración en el código, por lo que me disculpo de antemano.Source: https://habr.com/ru/post/es396209/
All Articles