SAW robot se arrastra, revuelve y nada con un solo motor
 Si necesita movimiento, el dispositivo puede recurrir a ruedas y pistas, caminar o entrar al exótico nivel de gatear y nadar. Hay muchas formas de hacer que el robot se mueva. A veces incluso puede parecer que no se puede inventar nada nuevo. Pero esto está lejos del caso. En un artículo publicado recientemente, David Zarruk, de la Universidad Ben-Gurion del Negev, describe un robot gusano con forma de onda que es impulsado por un solo actuador.El robot se llama: solo actuador robot de onda o SAW. Su estructura ondulada lo empuja hacia adelante o hacia atrás. Para giros necesita volantes. Tal diseño no solo se mueve bien en tierra, sino que también puede trepar en grietas estrechas y nadar en el agua.Los investigadores dicen que los principios de rastreo se toman prestados de las serpientes. Aunque el curso del robot SAW se puede comparar con los métodos para mover el gusano, la analogía es arbitraria. El cuerpo de una lombriz de tierra se alarga en una parte debido al adelgazamiento. El front end avanza, seguido por el back, que se contrae. El proceso se repite. SAW es una sinusoide en la superficie. Los principios del movimiento del robot son similares a los utilizados por algunos pequeños animales marinos en una escala mucho más pequeña: los organismos microscópicos flotan con la ayuda de un flagelo.Video de demostración del robot.Minimalismo, facilidad de movimiento y alto rendimiento: esto es en lo que Zarruk ha estado trabajando durante mucho tiempo. En una entrevista con la revista IEEE Spectrum, Zarruk dijo que en 2004, como estudiante, intentó recrear un movimiento ondulatorio similar al de los organismos vivos. Mientras trabajaba en un doctorado, a Zarruk se le ocurrió la idea de utilizar el movimiento ondulatorio para los sistemas dentro del sistema digestivo. Un sistema simple con un motor puede reducirse y usarse para moverse dentro de los intestinos.Hace un par de años, Zarruk enseñó un curso de diseño de productos y habló sobre resortes. Luego notó que en una proyección el resorte es un círculo, en la otra una sinusoide. Si el resorte gira, entonces la ola se mueve sin complicaciones. La simplicidad de los principios del movimiento interesó al investigador. Imagen superior: el motor gira una espiral en relación con la carcasa. Imagen inferior: 25 enlaces rodean la espiral, están unidos al cuerpo y no giran.
SAW tiene un motor. Gira la columna vertebral del robot, una espiral rígida. Este último está rodeado por una serie de enlaces impresos en una impresora 3D. Estos enlaces son móviles en un plano, como partes de una cadena de bicicleta. La espiral gira y los enlaces suben y bajan. Al mismo tiempo, los enlaces se mueven de tal manera que, en contacto con la superficie, empujan el robot hacia adelante.
Si necesita movimiento, el dispositivo puede recurrir a ruedas y pistas, caminar o entrar al exótico nivel de gatear y nadar. Hay muchas formas de hacer que el robot se mueva. A veces incluso puede parecer que no se puede inventar nada nuevo. Pero esto está lejos del caso. En un artículo publicado recientemente, David Zarruk, de la Universidad Ben-Gurion del Negev, describe un robot gusano con forma de onda que es impulsado por un solo actuador.El robot se llama: solo actuador robot de onda o SAW. Su estructura ondulada lo empuja hacia adelante o hacia atrás. Para giros necesita volantes. Tal diseño no solo se mueve bien en tierra, sino que también puede trepar en grietas estrechas y nadar en el agua.Los investigadores dicen que los principios de rastreo se toman prestados de las serpientes. Aunque el curso del robot SAW se puede comparar con los métodos para mover el gusano, la analogía es arbitraria. El cuerpo de una lombriz de tierra se alarga en una parte debido al adelgazamiento. El front end avanza, seguido por el back, que se contrae. El proceso se repite. SAW es una sinusoide en la superficie. Los principios del movimiento del robot son similares a los utilizados por algunos pequeños animales marinos en una escala mucho más pequeña: los organismos microscópicos flotan con la ayuda de un flagelo.Video de demostración del robot.Minimalismo, facilidad de movimiento y alto rendimiento: esto es en lo que Zarruk ha estado trabajando durante mucho tiempo. En una entrevista con la revista IEEE Spectrum, Zarruk dijo que en 2004, como estudiante, intentó recrear un movimiento ondulatorio similar al de los organismos vivos. Mientras trabajaba en un doctorado, a Zarruk se le ocurrió la idea de utilizar el movimiento ondulatorio para los sistemas dentro del sistema digestivo. Un sistema simple con un motor puede reducirse y usarse para moverse dentro de los intestinos.Hace un par de años, Zarruk enseñó un curso de diseño de productos y habló sobre resortes. Luego notó que en una proyección el resorte es un círculo, en la otra una sinusoide. Si el resorte gira, entonces la ola se mueve sin complicaciones. La simplicidad de los principios del movimiento interesó al investigador. Imagen superior: el motor gira una espiral en relación con la carcasa. Imagen inferior: 25 enlaces rodean la espiral, están unidos al cuerpo y no giran.
SAW tiene un motor. Gira la columna vertebral del robot, una espiral rígida. Este último está rodeado por una serie de enlaces impresos en una impresora 3D. Estos enlaces son móviles en un plano, como partes de una cadena de bicicleta. La espiral gira y los enlaces suben y bajan. Al mismo tiempo, los enlaces se mueven de tal manera que, en contacto con la superficie, empujan el robot hacia adelante.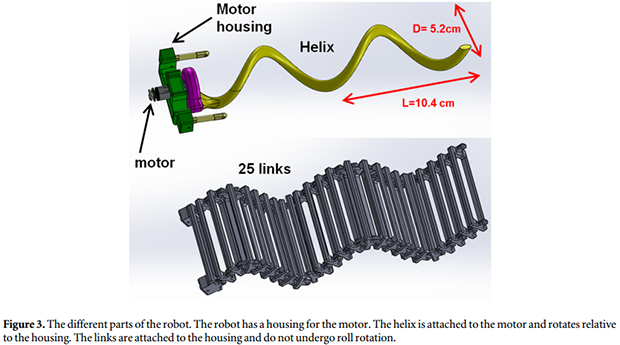
 La onda va de derecha a izquierda, y los enlaces en contacto con la tierra se mueven ligeramente hacia la izquierda y giran en sentido horario.El robot SAW solo puede moverse hacia adelante o hacia atrás. Para revertir es suficiente girar la espiral en la dirección opuesta. Dos ruedas en el estuche lo ayudan a dirigir, que de otra manera son pasivas: no alimentan el dispositivo. Puede parecer que la única forma de acelerar el movimiento es rotar la espiral más rápido. Pero los investigadores agregaron dientes a los enlaces que le permiten realizar movimientos de siete ondas en seis ciclos. Entonces la velocidad aumentó en un 13%. Los dientes especiales no interfieren con los enlaces que se mueven entre sí.
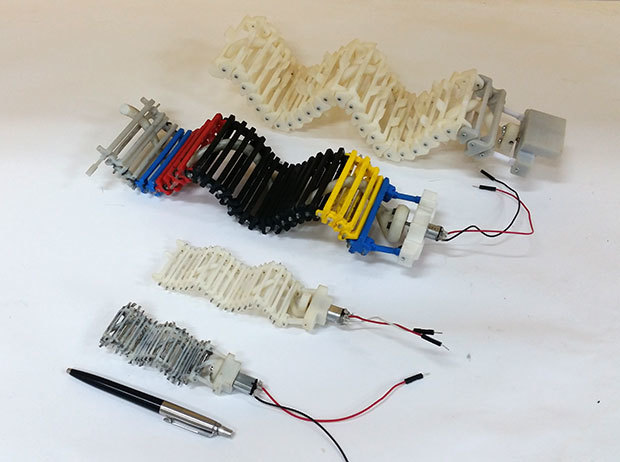
La onda va de derecha a izquierda, y los enlaces en contacto con la tierra se mueven ligeramente hacia la izquierda y giran en sentido horario.El robot SAW solo puede moverse hacia adelante o hacia atrás. Para revertir es suficiente girar la espiral en la dirección opuesta. Dos ruedas en el estuche lo ayudan a dirigir, que de otra manera son pasivas: no alimentan el dispositivo. Puede parecer que la única forma de acelerar el movimiento es rotar la espiral más rápido. Pero los investigadores agregaron dientes a los enlaces que le permiten realizar movimientos de siete ondas en seis ciclos. Entonces la velocidad aumentó en un 13%. Los dientes especiales no interfieren con los enlaces que se mueven entre sí. Se hicieron varios modelos de diferentes tamaños. El más grande (multicolor) tiene una velocidad de 5.6 ondas por segundo o 57 centímetros por segundo. Puede subir entre dos superficies estrechamente ajustadas a una velocidad de 8 cm / s. Encerrado en una funda impermeable, el modelo flota a una velocidad de 6 cm / s. SAW funciona no solo en el piso plano del laboratorio, sino que supera el terreno y atraviesa piedras y hierba. SAW no es solo un juguete. Ahora se ha reducido al tamaño de un bolígrafo (la muestra más baja en la foto de arriba). En el futuro, el robot se puede miniaturizar hasta tal punto que pueda extraer el intestino humano y tomar muestras para la biopsia. El trabajo para una mayor reducción ya está en marcha.Según Zarruk, el robot casi no requiere mantenimiento, lo cual es inusual para la estructura dinámica obtenida por la impresión 3D. En el futuro, se cambiará el sistema de rodaje; el actual no es demasiado elegante. Los investigadores quieren intentar unir dos robots SAW a través de una bisagra. Y si resulta que sobre la marcha cambia la frecuencia de las ondas y su amplitud, entonces el robot podrá adaptarse mejor a diferentes superficies, moverse a través de tuberías de muchos diámetros y optimizar el movimiento para cada uno de los fluidos.Robot de onda simple (SAW) de actuador único: diseño, modelado y experimentos
Se hicieron varios modelos de diferentes tamaños. El más grande (multicolor) tiene una velocidad de 5.6 ondas por segundo o 57 centímetros por segundo. Puede subir entre dos superficies estrechamente ajustadas a una velocidad de 8 cm / s. Encerrado en una funda impermeable, el modelo flota a una velocidad de 6 cm / s. SAW funciona no solo en el piso plano del laboratorio, sino que supera el terreno y atraviesa piedras y hierba. SAW no es solo un juguete. Ahora se ha reducido al tamaño de un bolígrafo (la muestra más baja en la foto de arriba). En el futuro, el robot se puede miniaturizar hasta tal punto que pueda extraer el intestino humano y tomar muestras para la biopsia. El trabajo para una mayor reducción ya está en marcha.Según Zarruk, el robot casi no requiere mantenimiento, lo cual es inusual para la estructura dinámica obtenida por la impresión 3D. En el futuro, se cambiará el sistema de rodaje; el actual no es demasiado elegante. Los investigadores quieren intentar unir dos robots SAW a través de una bisagra. Y si resulta que sobre la marcha cambia la frecuencia de las ondas y su amplitud, entonces el robot podrá adaptarse mejor a diferentes superficies, moverse a través de tuberías de muchos diámetros y optimizar el movimiento para cada uno de los fluidos.Robot de onda simple (SAW) de actuador único: diseño, modelado y experimentosSource: https://habr.com/ru/post/es396323/
All Articles