Guía para crear tentáculos mecánicos en casa: parte 1
 Entonces, ¿cómo no nos gustan los animatronics? Dobla la piel de silicona de cualquier muñeca, y abrirás un grupo de magia mecatrónica, dándole vida en la pantalla grande. Busqué en Internet un buen material introductorio sobre este tema, pero solo encontré uno: videos educativos de Stan Winston . Después de 30 segundos, sentí que los tentáculos despertaron mis deseos más básicos para la construcción de cosas tangibles. Me enamoré, solo tenía que construir una de esas cosas ... o varias. Y aquí está cómo crear un tentáculo animatrónico muy real.
Entonces, ¿cómo no nos gustan los animatronics? Dobla la piel de silicona de cualquier muñeca, y abrirás un grupo de magia mecatrónica, dándole vida en la pantalla grande. Busqué en Internet un buen material introductorio sobre este tema, pero solo encontré uno: videos educativos de Stan Winston . Después de 30 segundos, sentí que los tentáculos despertaron mis deseos más básicos para la construcción de cosas tangibles. Me enamoré, solo tenía que construir una de esas cosas ... o varias. Y aquí está cómo crear un tentáculo animatrónico muy real.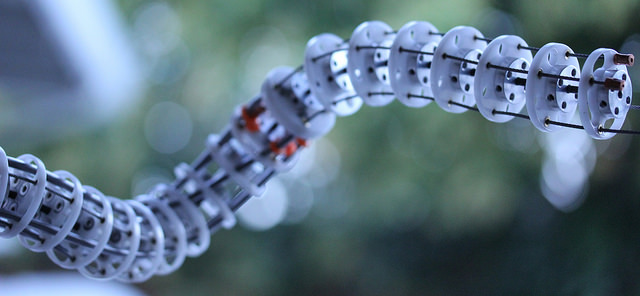 Los principiantes en realidad están mejor comenzando la inmersión con los tutoriales de Stan Winston. En dos horas, el instructor Richard Landon describe la esencia general, el conjunto de componentes y técnicas necesarias para hacer el mecanismo del tentáculo utilizando un conjunto de herramientas típicas, sin mencionar un montón de excelentes ejemplos de la película. [1]También tenemos la oportunidad de echar un vistazo al mundo de la fabricación de dispositivos más complejos basados en los mismos principios. Me gustaría comenzar la historia desde el momento en que termina, con tentáculos de dos etapas doblados en 4 lados. Además, haré un cambio en el diseño de los tentáculos de Landon. Le permitirá construir su propio tentáculo y controlador a partir de unos pocos componentes ya preparados , polyformaldehyde [Derlin] y el cortador láser ... De acuerdo, y de un par de piezas impresas en una impresora 3D.
Los principiantes en realidad están mejor comenzando la inmersión con los tutoriales de Stan Winston. En dos horas, el instructor Richard Landon describe la esencia general, el conjunto de componentes y técnicas necesarias para hacer el mecanismo del tentáculo utilizando un conjunto de herramientas típicas, sin mencionar un montón de excelentes ejemplos de la película. [1]También tenemos la oportunidad de echar un vistazo al mundo de la fabricación de dispositivos más complejos basados en los mismos principios. Me gustaría comenzar la historia desde el momento en que termina, con tentáculos de dos etapas doblados en 4 lados. Además, haré un cambio en el diseño de los tentáculos de Landon. Le permitirá construir su propio tentáculo y controlador a partir de unos pocos componentes ya preparados , polyformaldehyde [Derlin] y el cortador láser ... De acuerdo, y de un par de piezas impresas en una impresora 3D.
¿Cómo funcionan los tentáculos de dos etapas?
hackadaycom.files.wordpress.com/2016/08/tentacle_arc_aproximation.pngAmbas etapas del tentáculo, cada una de las cuales tiene dos grados de libertadEl tentáculo tiene dos etapas, cada una de las cuales tiene dos grados de libertad. Permiten que cada paso se doble en dos direcciones perpendiculares. Combinando estos grados de libertad, obtenemos cuatro en total, que nos permiten emular movimientos orgánicos completamente plausibles. Mirando la animación, puedes ver la unión de los dos pasos, aproximadamente en el medio del tentáculo.Con un buen montaje, podemos controlar ambas partes independientemente una de la otra. Idealmente En realidad, no hay nada perfecto, y nuestros materiales tienen sus limitaciones. Tendremos que jugar con la tensión y la distancia intervertebral hasta lograr resultados satisfactorios. Idealmente, tirando de la cuerda de cualquiera de los pasos, lograremos un arco ideal, disminuyendo en diámetro con una tensión creciente. Pero debido a las pérdidas por fricción en cada una de las vértebras, no podremos lograr un arco ideal, aunque el resultado será lo suficientemente bueno como para engañar a las personas al otro lado de la pantalla.Entre las poses del tentáculo disponibles para nosotros, no hay rotación alrededor de su eje. Esto se hizo a propósito, ya que los titiriteros del pasado consideraban que tales movimientos no eran naturales, por ejemplo, para colas de gato o trompas de elefante. [1]
Idealmente, tirando de la cuerda de cualquiera de los pasos, lograremos un arco ideal, disminuyendo en diámetro con una tensión creciente. Pero debido a las pérdidas por fricción en cada una de las vértebras, no podremos lograr un arco ideal, aunque el resultado será lo suficientemente bueno como para engañar a las personas al otro lado de la pantalla.Entre las poses del tentáculo disponibles para nosotros, no hay rotación alrededor de su eje. Esto se hizo a propósito, ya que los titiriteros del pasado consideraban que tales movimientos no eran naturales, por ejemplo, para colas de gato o trompas de elefante. [1]Bosquejo del tentáculo
Para comprender el principio de funcionamiento, construiremos un tentáculo aproximado de dos placas y un núcleo flexible. Aquí hay un dibujo de nuestro embrión: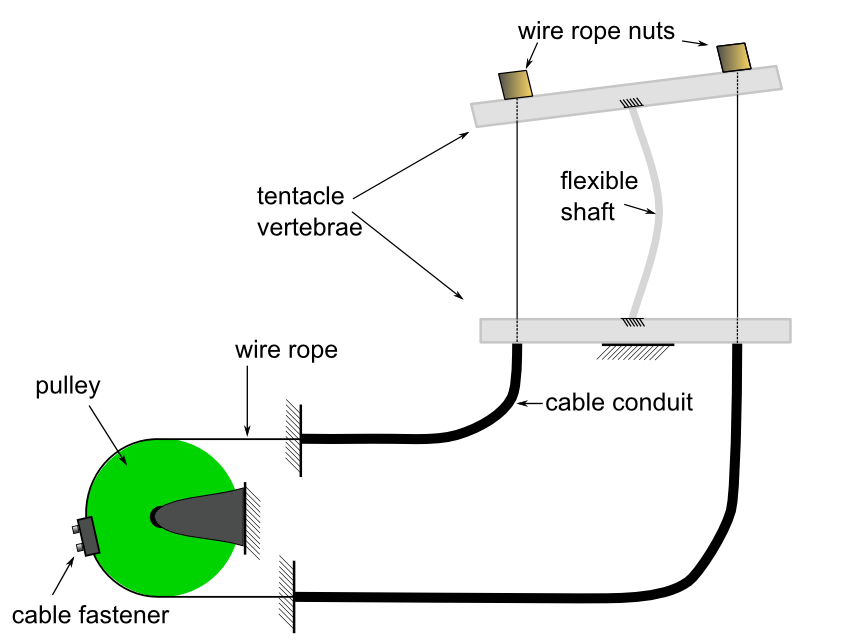 al impartir rotación a la polea, debilitamos un cable y tiramos de otro a la misma distancia. Acortar la longitud dobla el tentáculo hacia el alambre. Como los cables solo transmiten tensión, deben combinarse con otros complementarios para garantizar un movimiento de amplitud completa en ambas direcciones a lo largo de uno de los grados de libertad. Por lo tanto, tendremos que trabajar con 8 cables diferentes.El tentáculo mantiene su forma debido a sus dos características. Primero, el conducto del cable resiste la compresión. En segundo lugar, los cables se aprietan y se conectan rígidamente a la polea. Cambiar la longitud del cable es la única forma de mover la vértebra, y el canal del cable no cambia la longitud. Por lo tanto, la fijación de la polea también repara el tentáculo.
al impartir rotación a la polea, debilitamos un cable y tiramos de otro a la misma distancia. Acortar la longitud dobla el tentáculo hacia el alambre. Como los cables solo transmiten tensión, deben combinarse con otros complementarios para garantizar un movimiento de amplitud completa en ambas direcciones a lo largo de uno de los grados de libertad. Por lo tanto, tendremos que trabajar con 8 cables diferentes.El tentáculo mantiene su forma debido a sus dos características. Primero, el conducto del cable resiste la compresión. En segundo lugar, los cables se aprietan y se conectan rígidamente a la polea. Cambiar la longitud del cable es la única forma de mover la vértebra, y el canal del cable no cambia la longitud. Por lo tanto, la fijación de la polea también repara el tentáculo.El papel del canal de cable.
El canal de cable juega un papel importante en el proyecto. Sin ella, el movimiento de la etapa superior conduciría a movimientos parasitarios de la inferior, y no necesitamos esto. Necesitamos controlar independientemente ambos pasos.El canal de cable le permite redirigir la aplicación de fuerzas de un extremo del canal al otro sin la aparición de influencias espurias. El canal debe permanecer flexible mientras resiste la compresión.Es interesante que en nuestro esquema, podamos tomar cualquier punto del canal de cable y moverlo sin resistencia, porque:1. El canal es flexible.2. Su parte central, a lo largo de la cual pasa el cable, no cambia la longitud.Las curvas del canal no cambian su longitud, por lo que podemos doblarlo como desee, y el tentáculo permanecerá inmóvil. Convenientemente!Esto nos permite hacer dos cosas a la vez: estirar los cables que controlan la etapa superior a través de la etapa inferior, y controlar la etapa superior a través de la inferior, sin afectar la última.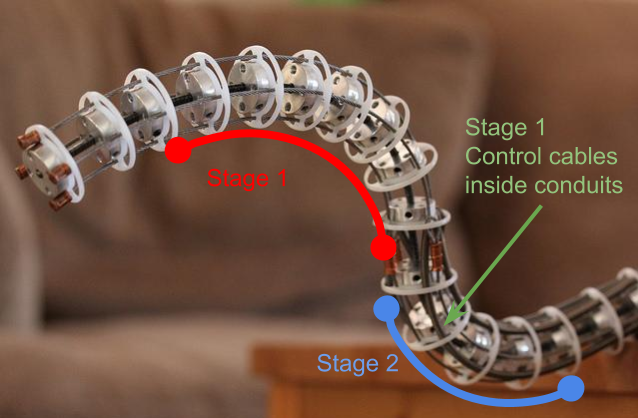 La imagen muestra que los cables que controlan la primera etapa pasan por la segunda etapa.
La imagen muestra que los cables que controlan la primera etapa pasan por la segunda etapa.Repuestos
Material principal
 Los movimientos suaves a lo largo de todos los grados de libertad se logran construyendo tentáculos a partir de materiales que resisten la rotación alrededor de su eje. La mayoría de las personas usan cables para velocímetros de automóviles viejos que tienen exactamente esta propiedad. [1] También usé tales cables por primera vez. Desafortunadamente, su diámetro es solo uno: 0.125 pulgadas, por lo que es imposible hacer una muñeca grande que no se doble bajo su propio peso. Ahora prefiero ejes flexibles de herramientas de torsión . Pero la mayoría de las imágenes en este artículo están hechas con cables de velocímetro.
Los movimientos suaves a lo largo de todos los grados de libertad se logran construyendo tentáculos a partir de materiales que resisten la rotación alrededor de su eje. La mayoría de las personas usan cables para velocímetros de automóviles viejos que tienen exactamente esta propiedad. [1] También usé tales cables por primera vez. Desafortunadamente, su diámetro es solo uno: 0.125 pulgadas, por lo que es imposible hacer una muñeca grande que no se doble bajo su propio peso. Ahora prefiero ejes flexibles de herramientas de torsión . Pero la mayoría de las imágenes en este artículo están hechas con cables de velocímetro.Segmentos
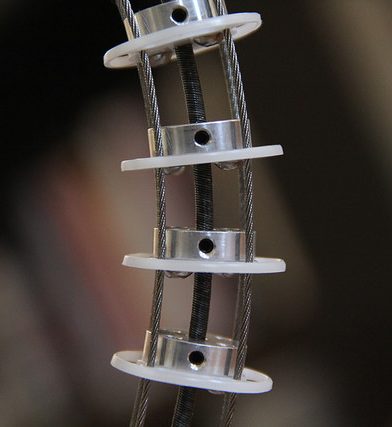
 Cada segmento vertebral debe estar firmemente fijado para que no se deslice y gire. Deben guiar correctamente el cable y en los lugares correctos: el canal del cable, mientras están firmemente conectados al cable del velocímetro. Landon utiliza piezas de aluminio hechas en una máquina CNC para esto. Pero yo, hurgando en las tiendas, encontré una manera más simple usando componentes listos para usar. Hoy en día, las piezas de repuesto para robots son muy populares debido a la prevalencia de este pasatiempo, y pude hacer vértebras con la funda universal del Pololu [Pololu Universal Aluminum Mounting Hub] y placas de polyformaldehyde [derlin].
Cada segmento vertebral debe estar firmemente fijado para que no se deslice y gire. Deben guiar correctamente el cable y en los lugares correctos: el canal del cable, mientras están firmemente conectados al cable del velocímetro. Landon utiliza piezas de aluminio hechas en una máquina CNC para esto. Pero yo, hurgando en las tiendas, encontré una manera más simple usando componentes listos para usar. Hoy en día, las piezas de repuesto para robots son muy populares debido a la prevalencia de este pasatiempo, y pude hacer vértebras con la funda universal del Pololu [Pololu Universal Aluminum Mounting Hub] y placas de polyformaldehyde [derlin].Cable de control
 Tome el cable de control igual que en las bicicletas, pero la verdad es más delgada. He utilizado con éxito dos diámetros de cable: 1,2 mm y 0,8 mm. Puede usar cables caros, que se procesan de tal manera que no se enreden, o simplemente iluminan el extremo recortado del cable hasta que brille. [3]
Tome el cable de control igual que en las bicicletas, pero la verdad es más delgada. He utilizado con éxito dos diámetros de cable: 1,2 mm y 0,8 mm. Puede usar cables caros, que se procesan de tal manera que no se enreden, o simplemente iluminan el extremo recortado del cable hasta que brille. [3]Canal de cable
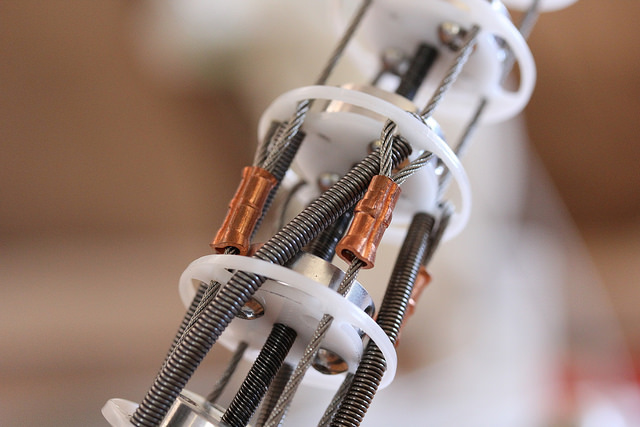
Hay muchas opciones para el canal: tubos de nylon, una trenza de bicicleta, muelles. Todo lo que necesitamos es que el canal resista la compresión y sea flexible. La resistencia a la compresión debe proporcionar una fuerza "igual y opuesta" para el movimiento. Se necesita flexibilidad para que el canal no interfiera con otras secciones del tentáculo para doblarse. Para los mecanismos de una sola etapa, cualquiera de las opciones enumeradas es adecuada. Para la flexibilidad en varias etapas es más importante. Hasta ahora, en mi experiencia, los resortes de tracción han sido los más adecuados como el más flexible de todos los materiales.Puede comprar cualquier cosa en la tienda McMaster-Carr si conoce el nombre correcto. Nuestro canal de cable se llama "resorte de extensión de longitud continua" ( 9664K12 ) y cuesta solo $ 4.40 por 36 pulgadas. [300 rub / m]Se pueden pedir resortes más pequeños al Dr. Y Co Templeman . El costo de los resortes será mayor, pero el surtido es más rico. Se pueden encontrar diámetros muy pequeños en Molex .
Se necesita flexibilidad para que el canal no interfiera con otras secciones del tentáculo para doblarse. Para los mecanismos de una sola etapa, cualquiera de las opciones enumeradas es adecuada. Para la flexibilidad en varias etapas es más importante. Hasta ahora, en mi experiencia, los resortes de tracción han sido los más adecuados como el más flexible de todos los materiales.Puede comprar cualquier cosa en la tienda McMaster-Carr si conoce el nombre correcto. Nuestro canal de cable se llama "resorte de extensión de longitud continua" ( 9664K12 ) y cuesta solo $ 4.40 por 36 pulgadas. [300 rub / m]Se pueden pedir resortes más pequeños al Dr. Y Co Templeman . El costo de los resortes será mayor, pero el surtido es más rico. Se pueden encontrar diámetros muy pequeños en Molex .Punto de curvatura
 Por primera vez, fue bastante difícil para mí imaginar el diseño de este elemento. Sin embargo, habiendo entendido la ubicación de los extremos del cable, esta parte es fácil de construir. Cada cable que controla la sección inferior termina en un bucle. En la misma vértebra, los canales de cable terminan y contienen el siguiente conjunto de cables de control. A partir de ahí, el siguiente conjunto de cables continúa.
Por primera vez, fue bastante difícil para mí imaginar el diseño de este elemento. Sin embargo, habiendo entendido la ubicación de los extremos del cable, esta parte es fácil de construir. Cada cable que controla la sección inferior termina en un bucle. En la misma vértebra, los canales de cable terminan y contienen el siguiente conjunto de cables de control. A partir de ahí, el siguiente conjunto de cables continúa.Diseños alternativos
¿Podríamos usar otro material para las vértebras, por ejemplo, madera, para ahorrar en casquillos metálicos? Quizás, pero ese diseño se hizo no solo así, sino con un cálculo.En primer lugar, la complejidad del diseño debe equilibrarse con piezas terminadas o con un método de fabricación asequible (cortador láser e impresora 3D). Por lo tanto, incluso las personas con ojo atípico y destreza pueden hacer tal diseño.En segundo lugar, la tecnología de fabricación de prototipos debe ser determinista y repetible. El dispositivo debe comportarse igual, fabricado en cualquier parte del mundo. No es necesario practicar magia y rezar a los dioses del pegamento, de pie sobre una pierna, mientras su epoxi se endurece a un nivel inusual de humedad. Tecnologías simples que se comportan igual en todas partes y siempre.Pero busque alternativas de diseño usted mismo. Finalicé el controlador y el tentáculo, pero esto no significa que el trabajo esté completo. Para cuando se complete la tercera parte del artículo, todo el desarrollo estará en sus manos, y puede hacer lo que quiera con él.Parte 2Referencias
[1] Stan Winston Cable Mechanism BasicsTutorial detallado sobre la creación de tentáculos simples[2] Animatronics Demo con Rick Lazzarini 1:21:01Ejemplos de uso de cables de velocímetro[3] CS235: Diseño de robot aplicado, Conferencia 7-Introducción a las transmisiones de cableIntroducción sobre el uso de cables en robóticaSource: https://habr.com/ru/post/es398165/
All Articles