El robot aprendió a jugar Lego, mirando a una persona.
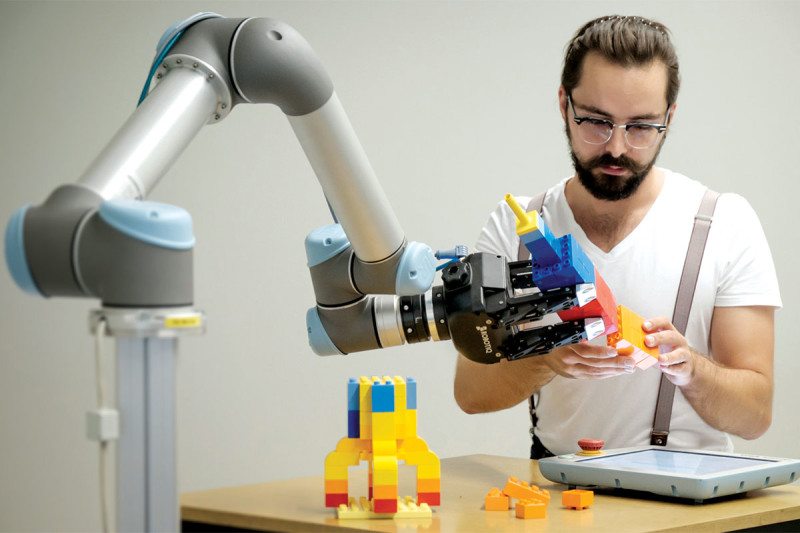 David Vogt le enseña a un robot cómo construir un cohete con ladrillos de Lego (Fuente: Universidad Estatal de Arizona / TU Freiburg)David Vogt es profesor de robótica en la Universidad de Minería y Tecnología de Freiberg. Tiene un hijo al que le encanta interpretar a Lego, así como muchos detalles de este constructor. Una vez, a un científico se le ocurrió la idea de probar la posibilidad de entrenar a un robot para ensamblar varios modelos de piezas de Lego."Mi hijo y yo pensamos que sería bueno crear un robot que pudiera hacer lo que hacemos cuando jugamos " , dice Vogt. Un especialista con un grupo de colegas decidió comprar un manipulador industrial robótico para su laboratorio. Al llegar a la academia, los robots fueron equipados con una cámara Kinect.Usando esta cámara, el robot podría observar a personas que, usando etiquetas para rastrear movimientos, ensamblaron un cohete a partir de ladrillos Lego. La gente ensambló un cohete del mismo diseño varias veces, y el robot gradualmente recibió más y más información sobre el proceso de ensamblaje de este objeto. Después de un tiempo, pudo interactuar con un compañero humano, ayudando a su compañero a armar el modelo. Al mismo tiempo, el robot no siempre encontraba los detalles necesarios donde contaba, pero ya sabía cómo buscarlos por su cuenta. Esto, según los expertos, es solo un ejemplo de entrenamiento de robots al demostrar cómo una persona realiza un proceso.Las personas aprenden observando a otras personas sin demasiados problemas. Por ejemplo, los niños solo reciben información sobre el mundo y las acciones de otras personas. Pero programar un robot para realizar una nueva tarea es muy difícil. Comprendemos intuitivamente cómo completar una u otra tarea, pero la intuición no está disponible para el robot: todas las acciones deben establecerse rígidamente utilizando el programa.Pero ahora, los especialistas en robótica están tratando de dominar un nuevo método de entrenamiento de robots, un método en el que los sistemas informáticos monitorean las acciones humanas mediante la recopilación de datos de observación en una base de datos. Algunos científicos intentan controlar las acciones de los robots usando una computadora o teléfono, mientras que otros proporcionansus pupilos completan la libertad de acción, permitiéndoles aprender de sus propios errores. Además, a los robots no solo se les enseña a ensamblar objetos de Lego, por ejemplo, el año pasado, científicos de la Universidad de Maryland comenzaron a enseñar su sistema para cocinar, permitiéndole ver videos culinarios de YouTube.Google ha decidido recientemente realizar su propio experimento con robots de autoaprendizaje. Para esto, se compraron manipuladores industriales, que se conectaron a una sola base de datos. Cada acción de cualquiera de los robots fue registrada, y luego estos datos fueron procesados por una red neuronal. Después del análisis, el robot recibió instrucciones que describen el algoritmo óptimo de acciones. El trabajo que los sistemas intentaron entrenar fue abrir una puerta con una manija.En uno de los experimentos, el robot recibió instrucciones de estudiar una variedad de objetos. Estas son botellas de agua, papelería, libros. El sistema se acostumbró rápidamente a la tarea y transmitió a los "colegas" información sobre la secuencia necesaria de sus acciones. Después de eso, el sistema recibió una nueva tarea: mover un determinado objeto a un punto dado. El robot no recibió ninguna instrucción sobre las características del objeto, y los objetos estaban cambiando constantemente. Al final resultó que, los robots pueden hacer bien tales tareas, utilizando los datos acumulados durante el estudio de dichos objetos. Las máquinas lograron calcular las consecuencias de mover el objeto en la superficie al punto deseado.En cuanto a abrir las puertas, en uno de los casos una persona ayudó a los robots. Otras máquinas recibieron los datos necesarios para el entrenamiento de un robot que interactúa con un compañero humano, y luego usaron esta información para repetir las acciones de un "colega". Al final resultó que, con el tiempo, los sistemas fueron entrenados de manera bastante efectiva por ensayo y error. Después de que los manipuladores comenzaron a abrir puertas con diferentes tipos de manijas sin problemas, las condiciones de la tarea cambiaron. Por ejemplo, la posición de la puerta, el ángulo de apertura, etc., cambió. En el experimento final, resultó que los robots pueden abrir una puerta y una cerradura sin ayuda humana, algo que aún no han encontrado."Al realizar ciertas acciones, a menudo actuamos intuitivamente, probablemente podamos pasar esta intuición a los robots, que, como resultado, aprenden y trabajan más rápido", dice uno de los desarrolladores de Google.Uno de los problemas para este tipo de capacitación de robots es traducir la información a un formulario que sea comprensible para una máquina. La mayoría de los robots no tienen sensores que les permitan percibir el entorno y los fenómenos que ocurren en él como un ser humano. Por lo tanto, dicha información debe adaptarse cada vez para los robots y sus sistemas de control. "Un buen maestro de robots entiende que está tratando con una máquina que tiene una forma diferente de percibir la realidad circundante", dice Aude Billard, de la Escuela Politécnica Federal de Lausana (Suiza).David Vogt y su equipo confían en que los humanos pueden entrenar robots demostrando sus acciones. Quizás este método de capacitación se pueda utilizar en las empresas. Por lo tanto, los sistemas robóticos pueden ser entrenados en nuevas funciones sin usar el trabajo de los programadores. Y así, un trabajador ordinario podrá mostrarle al robot lo que debe hacerse y comenzará a realizar un nuevo trabajo por sí mismo."Idealmente, los humanos y los robots deberían poder realizar acciones que no pueden realizar por separado", dijo Vogt. Los resultados pronto serán presentados por el profesor y sus colegas en la Conferencia Internacional de Robots Humanoides en Cancún, México.
David Vogt le enseña a un robot cómo construir un cohete con ladrillos de Lego (Fuente: Universidad Estatal de Arizona / TU Freiburg)David Vogt es profesor de robótica en la Universidad de Minería y Tecnología de Freiberg. Tiene un hijo al que le encanta interpretar a Lego, así como muchos detalles de este constructor. Una vez, a un científico se le ocurrió la idea de probar la posibilidad de entrenar a un robot para ensamblar varios modelos de piezas de Lego."Mi hijo y yo pensamos que sería bueno crear un robot que pudiera hacer lo que hacemos cuando jugamos " , dice Vogt. Un especialista con un grupo de colegas decidió comprar un manipulador industrial robótico para su laboratorio. Al llegar a la academia, los robots fueron equipados con una cámara Kinect.Usando esta cámara, el robot podría observar a personas que, usando etiquetas para rastrear movimientos, ensamblaron un cohete a partir de ladrillos Lego. La gente ensambló un cohete del mismo diseño varias veces, y el robot gradualmente recibió más y más información sobre el proceso de ensamblaje de este objeto. Después de un tiempo, pudo interactuar con un compañero humano, ayudando a su compañero a armar el modelo. Al mismo tiempo, el robot no siempre encontraba los detalles necesarios donde contaba, pero ya sabía cómo buscarlos por su cuenta. Esto, según los expertos, es solo un ejemplo de entrenamiento de robots al demostrar cómo una persona realiza un proceso.Las personas aprenden observando a otras personas sin demasiados problemas. Por ejemplo, los niños solo reciben información sobre el mundo y las acciones de otras personas. Pero programar un robot para realizar una nueva tarea es muy difícil. Comprendemos intuitivamente cómo completar una u otra tarea, pero la intuición no está disponible para el robot: todas las acciones deben establecerse rígidamente utilizando el programa.Pero ahora, los especialistas en robótica están tratando de dominar un nuevo método de entrenamiento de robots, un método en el que los sistemas informáticos monitorean las acciones humanas mediante la recopilación de datos de observación en una base de datos. Algunos científicos intentan controlar las acciones de los robots usando una computadora o teléfono, mientras que otros proporcionansus pupilos completan la libertad de acción, permitiéndoles aprender de sus propios errores. Además, a los robots no solo se les enseña a ensamblar objetos de Lego, por ejemplo, el año pasado, científicos de la Universidad de Maryland comenzaron a enseñar su sistema para cocinar, permitiéndole ver videos culinarios de YouTube.Google ha decidido recientemente realizar su propio experimento con robots de autoaprendizaje. Para esto, se compraron manipuladores industriales, que se conectaron a una sola base de datos. Cada acción de cualquiera de los robots fue registrada, y luego estos datos fueron procesados por una red neuronal. Después del análisis, el robot recibió instrucciones que describen el algoritmo óptimo de acciones. El trabajo que los sistemas intentaron entrenar fue abrir una puerta con una manija.En uno de los experimentos, el robot recibió instrucciones de estudiar una variedad de objetos. Estas son botellas de agua, papelería, libros. El sistema se acostumbró rápidamente a la tarea y transmitió a los "colegas" información sobre la secuencia necesaria de sus acciones. Después de eso, el sistema recibió una nueva tarea: mover un determinado objeto a un punto dado. El robot no recibió ninguna instrucción sobre las características del objeto, y los objetos estaban cambiando constantemente. Al final resultó que, los robots pueden hacer bien tales tareas, utilizando los datos acumulados durante el estudio de dichos objetos. Las máquinas lograron calcular las consecuencias de mover el objeto en la superficie al punto deseado.En cuanto a abrir las puertas, en uno de los casos una persona ayudó a los robots. Otras máquinas recibieron los datos necesarios para el entrenamiento de un robot que interactúa con un compañero humano, y luego usaron esta información para repetir las acciones de un "colega". Al final resultó que, con el tiempo, los sistemas fueron entrenados de manera bastante efectiva por ensayo y error. Después de que los manipuladores comenzaron a abrir puertas con diferentes tipos de manijas sin problemas, las condiciones de la tarea cambiaron. Por ejemplo, la posición de la puerta, el ángulo de apertura, etc., cambió. En el experimento final, resultó que los robots pueden abrir una puerta y una cerradura sin ayuda humana, algo que aún no han encontrado."Al realizar ciertas acciones, a menudo actuamos intuitivamente, probablemente podamos pasar esta intuición a los robots, que, como resultado, aprenden y trabajan más rápido", dice uno de los desarrolladores de Google.Uno de los problemas para este tipo de capacitación de robots es traducir la información a un formulario que sea comprensible para una máquina. La mayoría de los robots no tienen sensores que les permitan percibir el entorno y los fenómenos que ocurren en él como un ser humano. Por lo tanto, dicha información debe adaptarse cada vez para los robots y sus sistemas de control. "Un buen maestro de robots entiende que está tratando con una máquina que tiene una forma diferente de percibir la realidad circundante", dice Aude Billard, de la Escuela Politécnica Federal de Lausana (Suiza).David Vogt y su equipo confían en que los humanos pueden entrenar robots demostrando sus acciones. Quizás este método de capacitación se pueda utilizar en las empresas. Por lo tanto, los sistemas robóticos pueden ser entrenados en nuevas funciones sin usar el trabajo de los programadores. Y así, un trabajador ordinario podrá mostrarle al robot lo que debe hacerse y comenzará a realizar un nuevo trabajo por sí mismo."Idealmente, los humanos y los robots deberían poder realizar acciones que no pueden realizar por separado", dijo Vogt. Los resultados pronto serán presentados por el profesor y sus colegas en la Conferencia Internacional de Robots Humanoides en Cancún, México.Source: https://habr.com/ru/post/es398751/
All Articles