Desarrollo de un kit de electrificación de bicicleta.
¡Saludos a todos los aficionados a la electrónica! Mi nombre es Vasily Sukhoparov, soy el director técnico de Eczo.bike. Quiero hablar sobre cómo desarrollamos un kit de electrificación de bicicleta, qué dificultades tuvimos que enfrentar y qué trucos de ingeniería debemos seguir. Más adelante habrá un poco de programación STM32, circuitos, las complejidades del diseño de tableros de potencia y algunas palabras sobre el componente mecánico del CEM (Kit de electrificación de bicicleta). Kit de electrificación con una potencia máxima de 2600 W, computadora de a bordo, rastreador y baterías reemplazables.
¿Por qué se inventó todo esto?
Tener la experiencia del autoensamblaje de una bicicleta eléctrica en partes y una gran cantidad de conos empaquetados en el proceso, me llevó a comprender que en este momento no hay ofertas en el mercado que satisfagan todas mis necesidades.Cada detalle tenía que ser personalizado, las granjas colectivas, inventaron algo desde cero. No puede simplemente tomar y conectar la electrónica a una bicicleta, como una nueva tarjeta de video a una computadora. No había sistema Plug and Play Ride.Su propio sistema podría proporcionar:- modularidad- interfaz fácil de usar- la capacidad de ajustarse por sí mismo- no es necesario soldar los conectores y, en general, el conocimiento de la electrónica- bajo pesoTodo lo anterior es lo que un usuario ordinario tendrá que enfrentar cuando quiera volver a equiparse con componentes chinos. Con este enfoque, la construcción de bicicletas eléctricas seguirá siendo durante mucho tiempo la gran cantidad de geeks e ingenieros electrónicos, incapaces de ingresar a las masas.Las soluciones industriales no brillan con una potencia especial (hasta 1000 W) y, a menudo, están integradas en sus propios cuadros de bicicleta. En la aspiradora doméstica hay más "caballos" :) No hay necesidad de hablar sobre la configurabilidad y la conexión de características adicionales.Poco a poco, comenzando por el desarrollo de una computadora de a bordo en el sótano de su casa (literalmente) y terminando con un inversor, un sistema de administración de batería y todo el kit en su conjunto, se llegó a comprender cómo se debe construir todo para garantizar la máxima comodidad al usar este dispositivo. Al mismo tiempo, para que la cosa funcione para el usuario, y no para el usuario, tuvo que pasar tiempo para que funcione.¿Con qué terminaste?
El prototipo en la imagen antes del kat fue ensamblado en su mayor parte por mano de obra, los paneles se soldaron directamente en la oficina y se programaron allí. Las cajas hechas de bloques de plástico sólido se fresaron en CNC, el marco de metal se hizo en producción. Las baterías fueron ensambladas por su propia mano de obra, utilizando tecnología a la Tesla, cuyo componente básico es un elemento en el factor de forma 18650, se encuentran células similares en la mayoría de las computadoras portátiles. Sí, formalmente Tesla viaja con baterías de portátiles :-) La computadora de a bordo muestra no solo el voltaje de la batería o el porcentaje de carga (que a veces no es informativo), sino también el consumo en W * h, el consumo de energía específico W * h / km y el rango, tres parámetros principales que desea saber cuando conduce en algún lugar lejos, y necesitas planear una ruta. Con el aumento de la velocidad, la resistencia del aire también aumenta, además, en progresión, y hace la principal contribución al consumo de energía durante el movimiento. Puede ahorrar menos presionando la zapatilla en el piso o girando los pedales.
La computadora de a bordo muestra no solo el voltaje de la batería o el porcentaje de carga (que a veces no es informativo), sino también el consumo en W * h, el consumo de energía específico W * h / km y el rango, tres parámetros principales que desea saber cuando conduce en algún lugar lejos, y necesitas planear una ruta. Con el aumento de la velocidad, la resistencia del aire también aumenta, además, en progresión, y hace la principal contribución al consumo de energía durante el movimiento. Puede ahorrar menos presionando la zapatilla en el piso o girando los pedales.
 BMS (sistema de gestión de batería): un sistema de gestión de batería. Calcula la carga / descarga, controla el proceso de carga de los elementos y los equilibra, si es necesario. La diferencia con el BMS convencional está nuevamente en la confiabilidad, la mayoría de las veces el BMS chino se quemó durante un cortocircuito con una llama. Puede ver el voltaje en cada elemento de la batería, bajo carga, puede controlar su resistencia interna. El principal defecto de las baterías es el aumento de la autodescarga y el deterioro de la ext. resistencia, que puede dañar toda la batería si no se nota a tiempo.Monitoreo térmico incorporado. Agregar este módulo al sistema le permite usar la carga de la batería en la mayor medida posible sin comprometer su salud, por ejemplo, al reducir la energía cuando la batería está casi completamente descargada o a temperaturas muy frías / calientes, acelera el proceso de carga utilizando su propio algoritmo de equilibrio.
BMS (sistema de gestión de batería): un sistema de gestión de batería. Calcula la carga / descarga, controla el proceso de carga de los elementos y los equilibra, si es necesario. La diferencia con el BMS convencional está nuevamente en la confiabilidad, la mayoría de las veces el BMS chino se quemó durante un cortocircuito con una llama. Puede ver el voltaje en cada elemento de la batería, bajo carga, puede controlar su resistencia interna. El principal defecto de las baterías es el aumento de la autodescarga y el deterioro de la ext. resistencia, que puede dañar toda la batería si no se nota a tiempo.Monitoreo térmico incorporado. Agregar este módulo al sistema le permite usar la carga de la batería en la mayor medida posible sin comprometer su salud, por ejemplo, al reducir la energía cuando la batería está casi completamente descargada o a temperaturas muy frías / calientes, acelera el proceso de carga utilizando su propio algoritmo de equilibrio. Se eligió un motor fueraborda para la conversión de la bicicleta, como solo le permite obtener un buen momento en el volante y más potencia con menos peso. Este motor pesa 3 kg. A modo de comparación, el motor de la rueda puede ser de dos tipos: accionamiento directo - "accionamiento directo" - puede ser de 1000 W o más, pero pesan de 6 kg a 23 kg solo por motor. Engranaje - engranaje - hasta 500 W de peso desde 2 kg, y literalmente un par de motores de 1000 W hasta 4,5 kg. En el primer caso, es necesario colocar llantas reforzadas en la bicicleta, y es necesario acumular hierro en el punto de fijación del eje del motor, para que el cuadro no se colapse. Pero ni una sola rueda de motor en una categoría de peso similar le permite obtener un momento del orden de 160 Nm en la rueda trasera.
Se eligió un motor fueraborda para la conversión de la bicicleta, como solo le permite obtener un buen momento en el volante y más potencia con menos peso. Este motor pesa 3 kg. A modo de comparación, el motor de la rueda puede ser de dos tipos: accionamiento directo - "accionamiento directo" - puede ser de 1000 W o más, pero pesan de 6 kg a 23 kg solo por motor. Engranaje - engranaje - hasta 500 W de peso desde 2 kg, y literalmente un par de motores de 1000 W hasta 4,5 kg. En el primer caso, es necesario colocar llantas reforzadas en la bicicleta, y es necesario acumular hierro en el punto de fijación del eje del motor, para que el cuadro no se colapse. Pero ni una sola rueda de motor en una categoría de peso similar le permite obtener un momento del orden de 160 Nm en la rueda trasera.Características KEV
2600
70
50
36,4~54.6V
1C (~1 )
CAN
DC-DC OUT: 13V 13W + 10W
FSTN 240x128 2.8"
Bluetooth 4,0 BMS
Para garantizar la universalidad en la conexión, se seleccionó un bus CAN con un voltaje integrado de 13 V y un bus de alimentación independiente con voltaje de batería.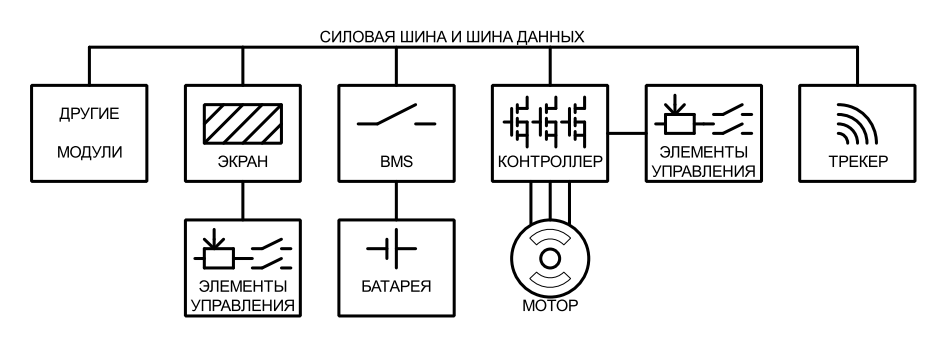 El corazón de todo el sistema es el controlador que controla el motor. Convierte el voltaje directo de la batería en voltaje alterno con una frecuencia de hasta 1500 Hz. (La frecuencia PWM es mayor - hasta 20 kHz) Las señales de control se reciben directamente o desde la computadora (pantalla) a bordo a través del bus CAN. También tiene un convertidor incorporado Ubat. a 13V para garantizar el funcionamiento de los módulos.La batería está conectada a la red pública a través de BMS, como se mencionó anteriormente, monitorea la batería para garantizar su larga vida. También tiene un convertidor de 13V para el funcionamiento de los módulos.La computadora de a bordo está conectada a través del bus CAN con el voltaje de a bordo, muestra la información que recibe de los módulos y también puede grabar datos en la tarjeta SD.El rastreador también está conectado a través de CAN + 13V y tiene a su disposición una pequeña batería para proteger contra el robo de bicicletas cuando falta la batería principal.El sistema admite la conexión de hasta 4 baterías y controladores al mismo tiempo, por ejemplo, para controlar vehículos de cuatro ruedas.
El corazón de todo el sistema es el controlador que controla el motor. Convierte el voltaje directo de la batería en voltaje alterno con una frecuencia de hasta 1500 Hz. (La frecuencia PWM es mayor - hasta 20 kHz) Las señales de control se reciben directamente o desde la computadora (pantalla) a bordo a través del bus CAN. También tiene un convertidor incorporado Ubat. a 13V para garantizar el funcionamiento de los módulos.La batería está conectada a la red pública a través de BMS, como se mencionó anteriormente, monitorea la batería para garantizar su larga vida. También tiene un convertidor de 13V para el funcionamiento de los módulos.La computadora de a bordo está conectada a través del bus CAN con el voltaje de a bordo, muestra la información que recibe de los módulos y también puede grabar datos en la tarjeta SD.El rastreador también está conectado a través de CAN + 13V y tiene a su disposición una pequeña batería para proteger contra el robo de bicicletas cuando falta la batería principal.El sistema admite la conexión de hasta 4 baterías y controladores al mismo tiempo, por ejemplo, para controlar vehículos de cuatro ruedas.En conclusión
En los siguientes artículos, le contaré más sobre el desarrollo de la computadora a bordo, el controlador, el sistema de administración de baterías y cómo ensamblamos las baterías de las celdas. Si es interesante, escribiré un artículo separado sobre cómo probar la unidad en un banco de pruebas o cómo medir la eficiencia del paquete motor + controlador en casa. Source: https://habr.com/ru/post/es399029/
All Articles