Multicopter aprendió a sentarse en los techos de automóviles en movimiento
 El dron se sienta en el techo de un automóvil a una velocidad de 50 km / h.La capacidad de los multicopteros para colgar estáticamente en el aire los convierte en una excelente herramienta para realizar diversas tareas, incluida la videovigilancia, la entrega de paquetes o la participación en operaciones de búsqueda y rescate. Al mismo tiempo, tienen que soportar una duración limitada de la batería y un rango relativamente pequeño. La carga de la batería no es suficiente para llegar al lugar, si se encuentra a muchos kilómetros de la base. Los ingenieros del laboratorio de sistemas robóticos móviles y autónomos de la Escuela Politécnica de Montreal (Canadá) propusieron una solución original al problema: se les enseñó a un dron a sentarse en los techos de los automóviles que pasaban a lo largo de su ruta.moviéndose a velocidades de hasta 50 km / h. Los automóviles asociados se convierten literalmente en portaaviones.Si la policía tiene todo el derecho de usar vehículos civiles para sus necesidades, entonces los drones policiales también pueden otorgarles ese derecho. Uno puede imaginar que incluso para los drones civiles introducirán un sistema de "asociación comercial", de modo que los conductores pagarán una pequeña tarifa si un pasajero no tripulado está conectado al techo. A un ritmo por kilómetro. El multicopter reconocerá los automóviles (por coordenadas GPS y visualmente) y se sentará en los techos de solo aquellos que participen en el programa de afiliados.En realidad, con la tecnología actual, el dron simplemente no podrá aterrizar en los techos de automóviles arbitrarios, porque para apuntar requiere una plataforma de aterrizaje de techo con un código especial AprilTag en blanco y negro.
El dron se sienta en el techo de un automóvil a una velocidad de 50 km / h.La capacidad de los multicopteros para colgar estáticamente en el aire los convierte en una excelente herramienta para realizar diversas tareas, incluida la videovigilancia, la entrega de paquetes o la participación en operaciones de búsqueda y rescate. Al mismo tiempo, tienen que soportar una duración limitada de la batería y un rango relativamente pequeño. La carga de la batería no es suficiente para llegar al lugar, si se encuentra a muchos kilómetros de la base. Los ingenieros del laboratorio de sistemas robóticos móviles y autónomos de la Escuela Politécnica de Montreal (Canadá) propusieron una solución original al problema: se les enseñó a un dron a sentarse en los techos de los automóviles que pasaban a lo largo de su ruta.moviéndose a velocidades de hasta 50 km / h. Los automóviles asociados se convierten literalmente en portaaviones.Si la policía tiene todo el derecho de usar vehículos civiles para sus necesidades, entonces los drones policiales también pueden otorgarles ese derecho. Uno puede imaginar que incluso para los drones civiles introducirán un sistema de "asociación comercial", de modo que los conductores pagarán una pequeña tarifa si un pasajero no tripulado está conectado al techo. A un ritmo por kilómetro. El multicopter reconocerá los automóviles (por coordenadas GPS y visualmente) y se sentará en los techos de solo aquellos que participen en el programa de afiliados.En realidad, con la tecnología actual, el dron simplemente no podrá aterrizar en los techos de automóviles arbitrarios, porque para apuntar requiere una plataforma de aterrizaje de techo con un código especial AprilTag en blanco y negro. El techo de un automóvil ordinario no es muy adecuado para el equipo de dicho sitio. Los desarrolladores del sistema creen que el transporte público (autobuses), camiones de correo y servicios de entrega son adecuados como transportistas. Estos autos viajan activamente por la ciudad, por lo que para un dron no será un problema "gratis" saltar una docena de kilómetros hasta su destino.En teoría, es posible equipar los techos de los automóviles con dichos lugares de aterrizaje. Durante los vuelos de prueba, los investigadores mostraron que incluso un área relativamente pequeña en el "automóvil de pasajeros" es suficiente para aterrizar.
El techo de un automóvil ordinario no es muy adecuado para el equipo de dicho sitio. Los desarrolladores del sistema creen que el transporte público (autobuses), camiones de correo y servicios de entrega son adecuados como transportistas. Estos autos viajan activamente por la ciudad, por lo que para un dron no será un problema "gratis" saltar una docena de kilómetros hasta su destino.En teoría, es posible equipar los techos de los automóviles con dichos lugares de aterrizaje. Durante los vuelos de prueba, los investigadores mostraron que incluso un área relativamente pequeña en el "automóvil de pasajeros" es suficiente para aterrizar. El dron se sienta en el techo de un automóvil de pasajeros a una velocidad de 40 km / h.Una ventaja de este método de movimiento es que el dron en el techo puede cargar sus baterías. Por lo tanto, dos problemas de UAV existentes se resuelven a la vez: batería insuficiente y corto alcance.El sistema de aterrizaje no tripulado desarrollado por ingenieros canadienses utiliza las coordenadas GPS de un teléfono móvil para buscar un vehículo, y durante el aterrizaje no requiere coordinación de maniobras entre el UAV y el automóvil. Es decir, no se requiere asistencia del conductor en absoluto, excepto para instalar una plataforma de aterrizaje en el techo con un marcador visual y un teléfono móvil. Teóricamente, el conductor durante el viaje puede no darse cuenta de que alguien usó su automóvil en la carretera.El elemento clave al aterrizar un dron en el techo de un automóvil son los marcadores visuales en blanco y negro de AprilTag , que recientemente se han utilizado cada vez más en robótica. Desarrollado por Olson en 2011, estos marcadores desempeñan el papel de identificación visual y posicionamiento 3D preciso del objeto en relación con la cámara.
El dron se sienta en el techo de un automóvil de pasajeros a una velocidad de 40 km / h.Una ventaja de este método de movimiento es que el dron en el techo puede cargar sus baterías. Por lo tanto, dos problemas de UAV existentes se resuelven a la vez: batería insuficiente y corto alcance.El sistema de aterrizaje no tripulado desarrollado por ingenieros canadienses utiliza las coordenadas GPS de un teléfono móvil para buscar un vehículo, y durante el aterrizaje no requiere coordinación de maniobras entre el UAV y el automóvil. Es decir, no se requiere asistencia del conductor en absoluto, excepto para instalar una plataforma de aterrizaje en el techo con un marcador visual y un teléfono móvil. Teóricamente, el conductor durante el viaje puede no darse cuenta de que alguien usó su automóvil en la carretera.El elemento clave al aterrizar un dron en el techo de un automóvil son los marcadores visuales en blanco y negro de AprilTag , que recientemente se han utilizado cada vez más en robótica. Desarrollado por Olson en 2011, estos marcadores desempeñan el papel de identificación visual y posicionamiento 3D preciso del objeto en relación con la cámara. Se utiliza un marcador de 30 × 30 cm para apuntar el dron y coordinar con la plataforma en seis grados de libertad. Como información auxiliar, es suficiente una estimación aproximada de las coordenadas y la velocidad del vehículo, que proviene de los módulos GPS e IMU (Unidad de Medición Inercial) del teléfono móvil.El quadrocopter está equipado con un sistema de navegación inercial (INS), una cámara de cardán de tres ejes (con una IMU separada) para rastrear el objetivo y una cámara fija de ángulo amplio hacia abajo que rastrea el marcador AprilTag a corta distancia en los últimos segundos de la maniobra. Los desarrolladores señalan que en la etapa de acercarse al vehículo, el UAV también puede usar el sensor de velocidad, que se coloca en muchos quadrocopters modernos. Dichos sensores calculan la velocidad a partir de una secuencia de marcos de fotos.
Se utiliza un marcador de 30 × 30 cm para apuntar el dron y coordinar con la plataforma en seis grados de libertad. Como información auxiliar, es suficiente una estimación aproximada de las coordenadas y la velocidad del vehículo, que proviene de los módulos GPS e IMU (Unidad de Medición Inercial) del teléfono móvil.El quadrocopter está equipado con un sistema de navegación inercial (INS), una cámara de cardán de tres ejes (con una IMU separada) para rastrear el objetivo y una cámara fija de ángulo amplio hacia abajo que rastrea el marcador AprilTag a corta distancia en los últimos segundos de la maniobra. Los desarrolladores señalan que en la etapa de acercarse al vehículo, el UAV también puede usar el sensor de velocidad, que se coloca en muchos quadrocopters modernos. Dichos sensores calculan la velocidad a partir de una secuencia de marcos de fotos. Las estimaciones de ubicación relativa, velocidad y aceleración se calculan en la computadora de a bordo utilizando el filtro Kalmana una frecuencia de 100 Hz. Este es un filtro recursivo efectivo que evalúa el vector de estado de un sistema dinámico utilizando una serie de mediciones incompletas y ruidosas.
Las estimaciones de ubicación relativa, velocidad y aceleración se calculan en la computadora de a bordo utilizando el filtro Kalmana una frecuencia de 100 Hz. Este es un filtro recursivo efectivo que evalúa el vector de estado de un sistema dinámico utilizando una serie de mediciones incompletas y ruidosas. Los experimentos han demostrado que el multicopter aterriza con éxito en automóviles a velocidades de hasta 50 km / h. Con el aumento de la velocidad, aumenta el riesgo de estancamiento desde el borde de la plataforma. Quizás este problema se pueda resolver aumentando la velocidad de procesamiento de la información de las cámaras de drones.
Los experimentos han demostrado que el multicopter aterriza con éxito en automóviles a velocidades de hasta 50 km / h. Con el aumento de la velocidad, aumenta el riesgo de estancamiento desde el borde de la plataforma. Quizás este problema se pueda resolver aumentando la velocidad de procesamiento de la información de las cámaras de drones.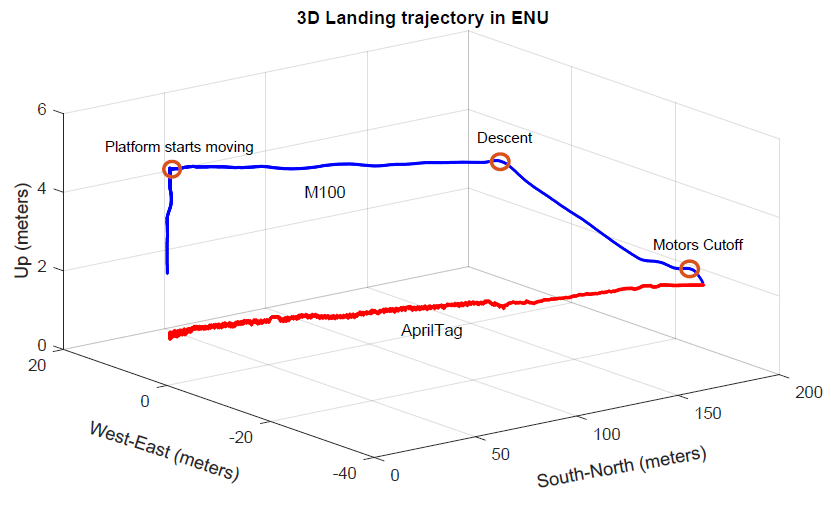 Trayectoria de aterrizaje a una velocidad de 50 km / h Elartículo científico fue preparado para el Congreso Mundial 2017 de IFAC y publicado el 22 de noviembre de 2016 en arXiv.org (arXiv: 1611.07329).
Trayectoria de aterrizaje a una velocidad de 50 km / h Elartículo científico fue preparado para el Congreso Mundial 2017 de IFAC y publicado el 22 de noviembre de 2016 en arXiv.org (arXiv: 1611.07329).Source: https://habr.com/ru/post/es399463/
All Articles