Cómo nos preparamos para el UAV Challenge 2016
 El quad-plane Murena durante los vuelos de prueba delUAV Challenge es un evento anual destinado a ampliar las capacidades del UAVy, en combinación, una de las competiciones de robótica más ambiciosas del mundo. El impacto del evento en la industria es bastante grande: en 2014, por ejemplo, los contribuyentes regulares de proyectos tan populares como Ardupilot, PX4 y Paparazzi participaron en el UAV Challenge, por lo que muchas de las características de estos controladores de vuelo existentes hoy se formaron precisamente bajo la influencia de los requisitos de estas competiciones. Cada dos años, la competencia está abierta a equipos de todo el mundo y, al mismo tiempo, la misión de salvar a una persona se convierte en el tema. Este año, también logramos ingresar a la lista de diez equipos que pasaron las tres etapas preliminares del Desafío UAV, y fuimos a los eventos de la parte final, que tuvo lugar del 27 al 29 de septiembre en Dalby, Australia. El desafío terminó hace dos meses, desde entonces nuestras impresiones se han calmado,Hemos analizado la experiencia y ahora estamos listos para describir los dos aviones con los que llegamos al evento.Somos MelAvio Avionics Club, una asociación de estudiantes de la Universidad Tecnológica de Varsovia. Nos ocupamos de la programación, la electrónica y la mecánica como parte de su aplicación a los drones, y casi todo nuestro trabajo se dedica a la preparación de varias competiciones, la principal de las cuales ha sido recientemente el Desafío UAV. De hecho, este año MelAvio participó en el desafío por segunda vez: antes de eso, hace dos años, nuestro equipo ya había ido a la final en Australia. Luego logramos mostrarnos bien con el diseño mecánico original y un controlador de vuelo casero, ocupando el décimo lugar en la clasificación general y recibiendo un premio por las habilidades de vuelo, aunque no cumplimos completamente la misión de la competencia.
El quad-plane Murena durante los vuelos de prueba delUAV Challenge es un evento anual destinado a ampliar las capacidades del UAVy, en combinación, una de las competiciones de robótica más ambiciosas del mundo. El impacto del evento en la industria es bastante grande: en 2014, por ejemplo, los contribuyentes regulares de proyectos tan populares como Ardupilot, PX4 y Paparazzi participaron en el UAV Challenge, por lo que muchas de las características de estos controladores de vuelo existentes hoy se formaron precisamente bajo la influencia de los requisitos de estas competiciones. Cada dos años, la competencia está abierta a equipos de todo el mundo y, al mismo tiempo, la misión de salvar a una persona se convierte en el tema. Este año, también logramos ingresar a la lista de diez equipos que pasaron las tres etapas preliminares del Desafío UAV, y fuimos a los eventos de la parte final, que tuvo lugar del 27 al 29 de septiembre en Dalby, Australia. El desafío terminó hace dos meses, desde entonces nuestras impresiones se han calmado,Hemos analizado la experiencia y ahora estamos listos para describir los dos aviones con los que llegamos al evento.Somos MelAvio Avionics Club, una asociación de estudiantes de la Universidad Tecnológica de Varsovia. Nos ocupamos de la programación, la electrónica y la mecánica como parte de su aplicación a los drones, y casi todo nuestro trabajo se dedica a la preparación de varias competiciones, la principal de las cuales ha sido recientemente el Desafío UAV. De hecho, este año MelAvio participó en el desafío por segunda vez: antes de eso, hace dos años, nuestro equipo ya había ido a la final en Australia. Luego logramos mostrarnos bien con el diseño mecánico original y un controlador de vuelo casero, ocupando el décimo lugar en la clasificación general y recibiendo un premio por las habilidades de vuelo, aunque no cumplimos completamente la misión de la competencia. Barracuda, dron MelAvio, en UAV Challenge Outback Rescue 2014Este año, cambiamos un poco el enfoque de la participación y usamos un controlador de vuelo listo (Ardupilot en Pixhawk), finalizándolo según nuestras necesidades. Esto se debe al hecho de que los términos del desafío se han vuelto más complicados en comparación con la última vez, y el desarrollo independiente de una solución que cumpla con todas las condiciones es una tarea demasiado ambiciosa, era más lógico utilizar los proyectos de código abierto existentes.
Barracuda, dron MelAvio, en UAV Challenge Outback Rescue 2014Este año, cambiamos un poco el enfoque de la participación y usamos un controlador de vuelo listo (Ardupilot en Pixhawk), finalizándolo según nuestras necesidades. Esto se debe al hecho de que los términos del desafío se han vuelto más complicados en comparación con la última vez, y el desarrollo independiente de una solución que cumpla con todas las condiciones es una tarea demasiado ambiciosa, era más lógico utilizar los proyectos de código abierto existentes.Desafío desafío
Para aclarar el alcance de la tarea, tiene sentido describir brevemente la misión presentada para la competencia. La tarea de los equipos era entregar una muestra de sangre de Joe, un residente del campo, quien, según la leyenda, de repente se sintió mal al encontrarlo en su casa fuera de la ciudad. La casa de Joe está aislada de la ciudad por inundaciones, por lo que para alcanzarla y volar de regreso, el avión debe superar por completo hasta cincuenta y un kilómetros de espacio aéreo a lo largo de un camino indirecto. Además, la posición de Joe se conoce solo con una precisión de cien metros, y para cerrar la tierra y evitar dañar a la persona, el avión debe localizarla con mayor precisión ya en su lugar. También complica la situación el hecho de que casi no hay garantías sobre el paisaje tanto al comienzo de la misión como en las cercanías de Joe,de modo que el dron debe tener la capacidad de despegar o aterrizar vertical o verticalmente, así como un sistema que permita con un grado suficiente de confiabilidad seleccionar un lugar adecuado para el aterrizaje. Los organizadores del desafío fomentan el comportamiento autónomo del dron tanto como sea posible, por lo que el mejor enfoque posible es eliminar por completo las acciones del piloto de las misiones, desde la partida desde el punto de partida hasta el aterrizaje con una muestra de sangre en el mismo lugar. Además del dron principal de "entrega", un avión auxiliar puede participar en la misión. Ambos dispositivos tienen una amplia gama de requisitos para garantizar su vuelo seguro y su comportamiento correcto en situaciones imprevistas.así como un sistema que permite con un grado suficiente de confiabilidad elegir un lugar adecuado para el aterrizaje. Los organizadores del desafío fomentan el comportamiento autónomo del dron tanto como sea posible, por lo que el mejor enfoque posible es eliminar por completo las acciones del piloto de las misiones, desde la partida desde el punto de partida hasta el aterrizaje con una muestra de sangre en el mismo lugar. Además del dron principal de "entrega", un avión auxiliar puede participar en la misión. Ambos dispositivos tienen una amplia gama de requisitos para garantizar su vuelo seguro y su comportamiento correcto en situaciones imprevistas.así como un sistema que permite con un grado suficiente de confiabilidad elegir un lugar adecuado para el aterrizaje. Los organizadores del desafío fomentan el comportamiento autónomo del dron tanto como sea posible, por lo que el mejor enfoque posible es eliminar por completo las acciones del piloto de las misiones, desde la salida del sitio de lanzamiento hasta el aterrizaje con una muestra de sangre en el mismo lugar. Además del dron principal de "entrega", un avión auxiliar puede participar en la misión. Ambos dispositivos tienen una amplia gama de requisitos para garantizar su vuelo seguro y su comportamiento correcto en situaciones imprevistas.así que el mejor enfoque posible es eliminar por completo las acciones del piloto de las misiones, desde la partida desde el sitio de lanzamiento hasta el aterrizaje con una muestra de sangre en el mismo lugar. Además del dron principal de "entrega", un avión auxiliar puede participar en la misión. Ambos dispositivos tienen una amplia gama de requisitos para garantizar su vuelo seguro y su comportamiento correcto en situaciones imprevistas.así que el mejor enfoque posible es eliminar por completo las acciones del piloto de las misiones, desde la partida desde el sitio de lanzamiento hasta el aterrizaje con una muestra de sangre en el mismo lugar. Además del dron principal de "entrega", un avión auxiliar puede participar en la misión. Ambos dispositivos tienen una amplia gama de requisitos para garantizar su vuelo seguro y su comportamiento correcto en situaciones imprevistas.Ambos dispositivos tienen una amplia gama de requisitos para garantizar su vuelo seguro y su comportamiento correcto en situaciones imprevistas.Ambos dispositivos tienen una amplia gama de requisitos para garantizar su vuelo seguro y su comportamiento correcto en situaciones imprevistas. ,Como el avión no tripulado principal para la misión, decidimos usar un quad-plane, una combinación de un quadrocopter y un avión de diseño clásico. La necesidad de proporcionar despegue y aterrizaje vertical eliminó inmediatamente de nuestra atención los esquemas estándar de ala fija, por lo que las principales alternativas a la opción elegida fueron un rotor basculante y un helicóptero. La versión con un convertiplano fue rechazada debido al hecho de que con un paso fijo de la hélice, los motores convertibles están condenados a una baja eficiencia, lo que era inaceptable para nosotros debido al rango requerido supuesto; La construcción de un rotor basculante con un apoyo de paso variable implicaba un grado de complejidad mecánica, que nosotros, como organización científica estudiantil, no podíamos manejar debido a los recursos limitados.Para la opción de helicóptero, también esperábamos encontrar dificultades con la mecánica, pero no parecían demasiado deprimentes, y rechazamos esta opción en gran medida porque el quad-plane parecía una plataforma más original e interesante.
,Como el avión no tripulado principal para la misión, decidimos usar un quad-plane, una combinación de un quadrocopter y un avión de diseño clásico. La necesidad de proporcionar despegue y aterrizaje vertical eliminó inmediatamente de nuestra atención los esquemas estándar de ala fija, por lo que las principales alternativas a la opción elegida fueron un rotor basculante y un helicóptero. La versión con un convertiplano fue rechazada debido al hecho de que con un paso fijo de la hélice, los motores convertibles están condenados a una baja eficiencia, lo que era inaceptable para nosotros debido al rango requerido supuesto; La construcción de un rotor basculante con un apoyo de paso variable implicaba un grado de complejidad mecánica, que nosotros, como organización científica estudiantil, no podíamos manejar debido a los recursos limitados.Para la opción de helicóptero, también esperábamos encontrar dificultades con la mecánica, pero no parecían demasiado deprimentes, y rechazamos esta opción en gran medida porque el quad-plane parecía una plataforma más original e interesante.Construcción
Antes de diseñar el modelo "serio" del plano cuádruple, armamos un modelo de prueba, un aparato que llamamos "Freak". Este híbrido se fabricó sobre la base de un modelo de avión comprado ya hecho y se diseñó para probar la operatividad de la idea misma de un quad-plane, así como todas las innovaciones que adaptamos en el controlador de vuelo. Después de asegurarnos de que realmente podríamos volar en una configuración de drones de este tipo, comenzamos a desarrollar un modelo más grande. Avión de pruebaDesde el comienzo del desarrollo, estaba claro que las hélices y los motores de los helicópteros crearían resistencia y desequilibrio adicionales en el modo avión, por lo que decidimos tratar de hacer que el diseño del avión fuera lo más "posible" y lo más estable posible. Además, nuestro requisito inicial era preservar el espacio máximo en el cuerpo de la aeronave, de modo que se ajustara el equipo del sistema de visión por computadora y las baterías de polímero de litio con una capacidad suficiente para llevar a cabo una misión completa (la aeronave es completamente eléctrica). En base a estas consideraciones, elegimos un avión de ala alta con un ala trapezoidal de alargamiento medio y una cola en T; El ángulo del ala transversal V se eligió igual a un grado y medio.Con los datos iniciales indicados sobre el diseño y la suposición de la masa de la aeronave, comenzamos el desarrollo. Primero, con la ayuda de la aplicación Profili 2.0, se seleccionó una opción de perfil adecuada para el ala principal del avión, después de lo cual en XFLR5 especificamos la forma del ala y el volumen del plumaje. Además, en ANSYS Fluent verificamos que los motores de helicóptero y las hélices ubicadas en las inmediaciones del ala no realizan un cambio crítico en la naturaleza del flujo de aire en el ala. Para llevar a cabo estos procedimientos, se procedió a un estudio más detallado de toda la estructura en SOLIDWORKS.
Avión de pruebaDesde el comienzo del desarrollo, estaba claro que las hélices y los motores de los helicópteros crearían resistencia y desequilibrio adicionales en el modo avión, por lo que decidimos tratar de hacer que el diseño del avión fuera lo más "posible" y lo más estable posible. Además, nuestro requisito inicial era preservar el espacio máximo en el cuerpo de la aeronave, de modo que se ajustara el equipo del sistema de visión por computadora y las baterías de polímero de litio con una capacidad suficiente para llevar a cabo una misión completa (la aeronave es completamente eléctrica). En base a estas consideraciones, elegimos un avión de ala alta con un ala trapezoidal de alargamiento medio y una cola en T; El ángulo del ala transversal V se eligió igual a un grado y medio.Con los datos iniciales indicados sobre el diseño y la suposición de la masa de la aeronave, comenzamos el desarrollo. Primero, con la ayuda de la aplicación Profili 2.0, se seleccionó una opción de perfil adecuada para el ala principal del avión, después de lo cual en XFLR5 especificamos la forma del ala y el volumen del plumaje. Además, en ANSYS Fluent verificamos que los motores de helicóptero y las hélices ubicadas en las inmediaciones del ala no realizan un cambio crítico en la naturaleza del flujo de aire en el ala. Para llevar a cabo estos procedimientos, se procedió a un estudio más detallado de toda la estructura en SOLIDWORKS.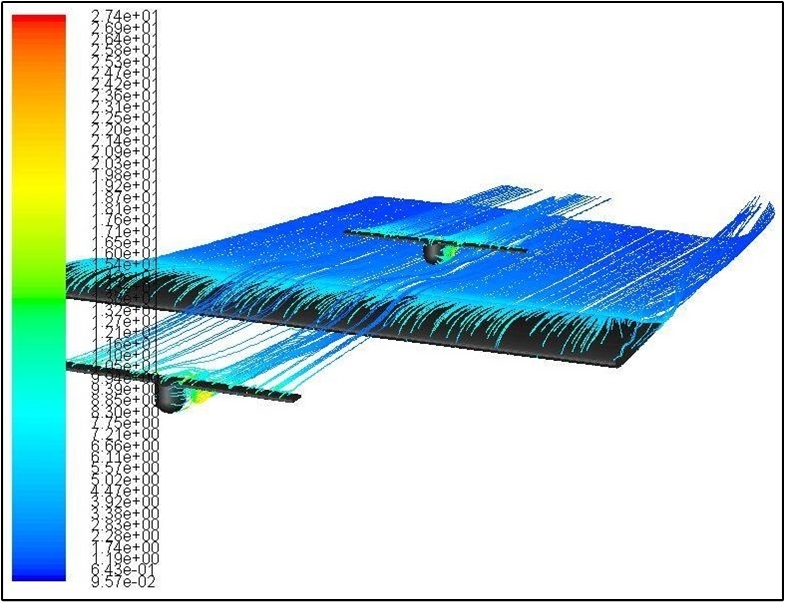 Prueba de flujo de hélice de avión en fluido ANSYSAl trabajar en la estructura, se tuvo que prestar especial atención al cuerpo y ala del avión, ya que tienen el número máximo de partes y tienen el mayor impacto en la capacidad de carga y la dinámica del avión. Fue necesario un enfoque especial para estos elementos no solo durante el desarrollo, sino también durante el ensamblaje, ya que era necesario hacerlos lo más livianos posible, manteniendo su resistencia suficiente.El ala del avión estaba hecha de tres componentes: la sección central y las consolas derecha e izquierda. La base para la construcción del ala fue espuma de poliestireno extruido. Las partes del ala fueron diseñadas para que su superficie fuera recta, y gracias a esto, una máquina de alambre CNC podría usarse para cortar poliéster con precisión. Después de eso, el poliéster prefabricado se sometió a un procesamiento adicional para aumentar su resistencia y mejorar el rendimiento aerodinámico. Entonces, la sección central en blanco se laminó con fibra de carbono y resina de poliéster; Para mantener la pieza de trabajo lisa y uniforme, durante el período de laminación se envolvió con plexiglás, se colocó en una bolsa de vacío y se fijó en espuma de poliestireno negativo.No fue posible utilizar fibra de carbono para la fabricación de consolas de ala, incluso porque era necesario colocar equipos de transmisión de radio en estas partes (el carbón crea interferencia), por lo que las consolas se laminaron con una capa de fibra de vidrio y una capa de balsa. Se realizaron fijaciones en los bordes de los elementos para su ensamblaje en una sola estructura de ala. Además, se cortó un lugar en el ala para colocar un transceptor de radio, unidades para alerones, cables y otros equipos; En los lugares necesarios, los recortes impresos en una impresora 3D se unieron a los recortes para el equipo.Se realizaron fijaciones en los bordes de los elementos para su ensamblaje en una sola estructura de ala. Además, se cortó un lugar en el ala para colocar un transceptor de radio, unidades para alerones, cables y otros equipos; En los lugares necesarios, los recortes impresos en una impresora 3D se unieron a los recortes para el equipo.Se realizaron fijaciones en los bordes de los elementos para su ensamblaje en una sola estructura de ala. Además, se cortó un lugar en el ala para colocar un transceptor de radio, unidades para alerones, cables y otros equipos; En los lugares necesarios, los recortes impresos en una impresora 3D se unieron a los recortes para el equipo.En los lugares donde las consolas del ala están conectadas al ala central, también se proporcionaron fijaciones para vigas longitudinales, en cuyos extremos hay motores de helicóptero. Los accesorios de las consolas de las alas, las vigas del helicóptero y el plumaje se imprimieron con nylon con tecnología SLS con mayor precisión. Las monturas de los motores del helicóptero fueron cortadas con láser de madera contrachapada y pegadas con resina de poliéster.
Prueba de flujo de hélice de avión en fluido ANSYSAl trabajar en la estructura, se tuvo que prestar especial atención al cuerpo y ala del avión, ya que tienen el número máximo de partes y tienen el mayor impacto en la capacidad de carga y la dinámica del avión. Fue necesario un enfoque especial para estos elementos no solo durante el desarrollo, sino también durante el ensamblaje, ya que era necesario hacerlos lo más livianos posible, manteniendo su resistencia suficiente.El ala del avión estaba hecha de tres componentes: la sección central y las consolas derecha e izquierda. La base para la construcción del ala fue espuma de poliestireno extruido. Las partes del ala fueron diseñadas para que su superficie fuera recta, y gracias a esto, una máquina de alambre CNC podría usarse para cortar poliéster con precisión. Después de eso, el poliéster prefabricado se sometió a un procesamiento adicional para aumentar su resistencia y mejorar el rendimiento aerodinámico. Entonces, la sección central en blanco se laminó con fibra de carbono y resina de poliéster; Para mantener la pieza de trabajo lisa y uniforme, durante el período de laminación se envolvió con plexiglás, se colocó en una bolsa de vacío y se fijó en espuma de poliestireno negativo.No fue posible utilizar fibra de carbono para la fabricación de consolas de ala, incluso porque era necesario colocar equipos de transmisión de radio en estas partes (el carbón crea interferencia), por lo que las consolas se laminaron con una capa de fibra de vidrio y una capa de balsa. Se realizaron fijaciones en los bordes de los elementos para su ensamblaje en una sola estructura de ala. Además, se cortó un lugar en el ala para colocar un transceptor de radio, unidades para alerones, cables y otros equipos; En los lugares necesarios, los recortes impresos en una impresora 3D se unieron a los recortes para el equipo.Se realizaron fijaciones en los bordes de los elementos para su ensamblaje en una sola estructura de ala. Además, se cortó un lugar en el ala para colocar un transceptor de radio, unidades para alerones, cables y otros equipos; En los lugares necesarios, los recortes impresos en una impresora 3D se unieron a los recortes para el equipo.Se realizaron fijaciones en los bordes de los elementos para su ensamblaje en una sola estructura de ala. Además, se cortó un lugar en el ala para colocar un transceptor de radio, unidades para alerones, cables y otros equipos; En los lugares necesarios, los recortes impresos en una impresora 3D se unieron a los recortes para el equipo.En los lugares donde las consolas del ala están conectadas al ala central, también se proporcionaron fijaciones para vigas longitudinales, en cuyos extremos hay motores de helicóptero. Los accesorios de las consolas de las alas, las vigas del helicóptero y el plumaje se imprimieron con nylon con tecnología SLS con mayor precisión. Las monturas de los motores del helicóptero fueron cortadas con láser de madera contrachapada y pegadas con resina de poliéster. Sección central en el proceso de fabricación.El marco de la caja también estaba hecho de madera contrachapada. Las partes necesarias se cortaron de madera contrachapada con un láser y luego se pegaron en una sola estructura usando pegamento de cianoacrilato. El marco se pegó con balsa, se reforzó en la nariz y se dobla con fibra de carbono, y luego se laminó con fibra de vidrio. El diseño proporcionó espacio para una cámara con un estabilizador (parte delantera del casco), baterías (parte posterior del casco), así como una computadora de a bordo y un controlador de vuelo (centro del casco). Además, se desarrollaron conexiones para el brazo y el brazo de la cola, lo que hizo posible colocar convenientemente los cables de alimentación y señal dentro de la estructura del avión.El estabilizador y el elevador se hicieron por un método similar a la fabricación de un ala de avión.
Sección central en el proceso de fabricación.El marco de la caja también estaba hecho de madera contrachapada. Las partes necesarias se cortaron de madera contrachapada con un láser y luego se pegaron en una sola estructura usando pegamento de cianoacrilato. El marco se pegó con balsa, se reforzó en la nariz y se dobla con fibra de carbono, y luego se laminó con fibra de vidrio. El diseño proporcionó espacio para una cámara con un estabilizador (parte delantera del casco), baterías (parte posterior del casco), así como una computadora de a bordo y un controlador de vuelo (centro del casco). Además, se desarrollaron conexiones para el brazo y el brazo de la cola, lo que hizo posible colocar convenientemente los cables de alimentación y señal dentro de la estructura del avión.El estabilizador y el elevador se hicieron por un método similar a la fabricación de un ala de avión.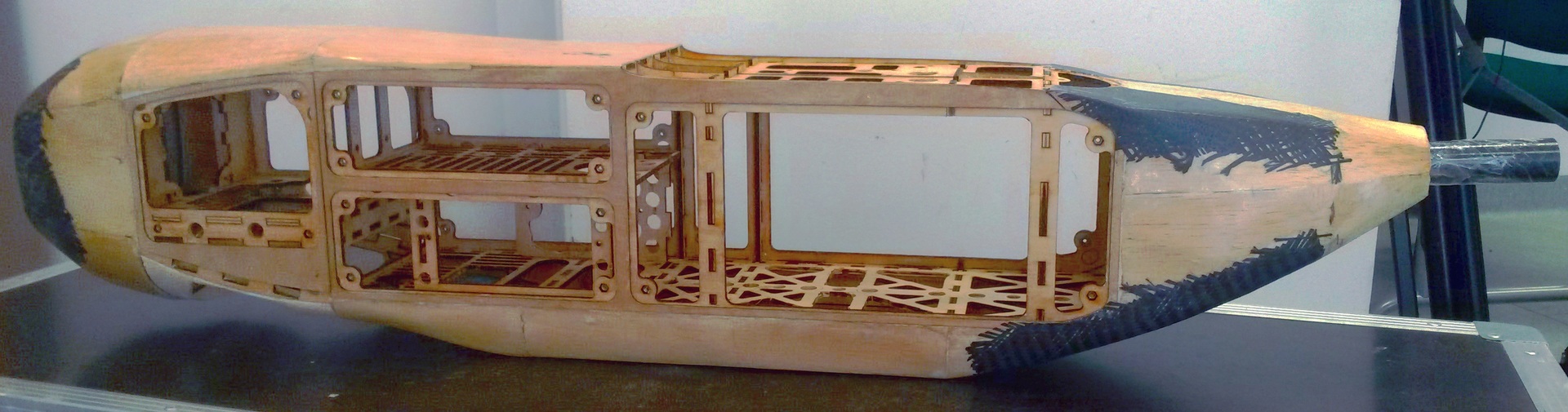 Cuadro UAV
Cuadro UAVParte de potencia
Como motores de helicóptero para el dispositivo, tomamos los más grandes para nosotros en el área de acceso operativo: el T-MOTOR U8 Pro 170KV con hélices de madera de 20 pulgadas de diámetro recomendadas por T-MOTOR para estos motores. ESC'i T-MOTOR FLAME 80A fueron seleccionados para controlar la velocidad de los motores. Alimentado por dos baterías de polímero de litio de seis celdas Tattu 22000mah conectadas en serie, dicha planta de energía nos permitió obtener una tracción vertical máxima de 20 kilogramos.Para la propulsión, elegimos el motor Scorpion HKIII 4035 500KV con el ESC FOXY XR-120 OPTO alimentado por la misma batería a la que están conectados los motores del helicóptero.El peso de despegue final de la aeronave con todo el equipo a bordo resultó igual a 14 kilogramos. La velocidad máxima del avión es de 40 m / s, la velocidad de crucero es de 25 m / s, la velocidad de pérdida de flujo es de 18 m / s, la duración del vuelo en modo avión es de más de una hora, el rango de vuelo es de hasta 100 km, lo que debería habernos permitido misiones incluso en condiciones climáticas adversas.Sistema de visión por computadora
Una parte importante del avión principal para nosotros fue el sistema de visión por computadora a bordo, sin el cual es imposible encontrar a Joe y completar la misión. Los elementos principales del sistema fueron la cámara JAI GO 2400 RGB con transferencia de fotograma completo y resolución Full HD, y la poderosa mini computadora GIGABYTE BXi7-5775. La cámara se montó en una suspensión estabilizadora de nuestro diseño mecánico original bajo el control del controlador Alexmos; esto nos permitió obtener imágenes con un nivel constante de inclinación en relación con el suelo, de modo que la silueta de una persona en ellas era claramente distinguible. La computadora se conectó al controlador de vuelo para proporcionar datos y comandos de telemetría. Además, usando un módem 4G, la computadora obtuvo acceso al servidor FTP,a través del cual se hizo comunicación con la estación del operador del sistema de visión por computadora. El algoritmo del programa que lanzamos a bordo se describe brevemente en el siguiente párrafo.Después de recibir la imagen de la cámara, el último paquete de datos de telemetría recibido del controlador de vuelo se adjunta de inmediato, por lo que para cada píxel en la imagen puede calcular aproximadamente sus coordenadas geográficas. Después de esto, se buscan áreas de interés: para esto, se construye un histograma de imagen y se seleccionan niveles en él, cuyo número de píxeles es mayor que un cierto valor umbral; estos son los niveles de regiones "poco interesantes", y los píxeles correspondientes no se consideran más. Los píxeles "interesantes" restantes se someten a una operación de erosión morfológica, de modo que solo quedan píxeles combinados en grupos: estos grupos se ordenan por concentración, tamaño y color, y como resultado obtenemos un grupo clasificado de áreas en la imagen que al menos puede parecer similar por personaDespués de eso, para cada una de estas áreas, calculamosHOG- descriptor y utilizando el vector de vectores de soporte lo clasificamos como persona o no persona. Si una región se clasifica como una persona, esto no significa que de inmediato la consideremos como tal, simplemente recibe una ventaja significativa en el ranking. Después, las imágenes de todas las áreas de interés encontradas se envían al servidor FTP en el orden correspondiente a su calificación. El archivo de cada imagen incluye información sobre la geolocalización de la región y el identificador de la imagen completa de la que se toma la región.La aplicación en la estación del operador le permite ver imágenes de áreas de interés cargadas por la máquina en un servidor FTP junto con un mapa del área sobre la que está volando el dispositivo, y ordenarlas por clasificación y tiempo. Si cierta área de interés hace que el operador sospeche, entonces él, nuevamente a través de un servidor FTP, puede enviar una solicitud a la aeronave, para que cargue en el servidor una foto completa correspondiente al área de interés seleccionada. Además, si en una de las áreas de interés mostradas, el operador reconoce a la persona que está buscando, puede enviar sus coordenadas de aterrizaje preferidas a la computadora de a bordo, y la computadora las enviará al controlador de vuelo.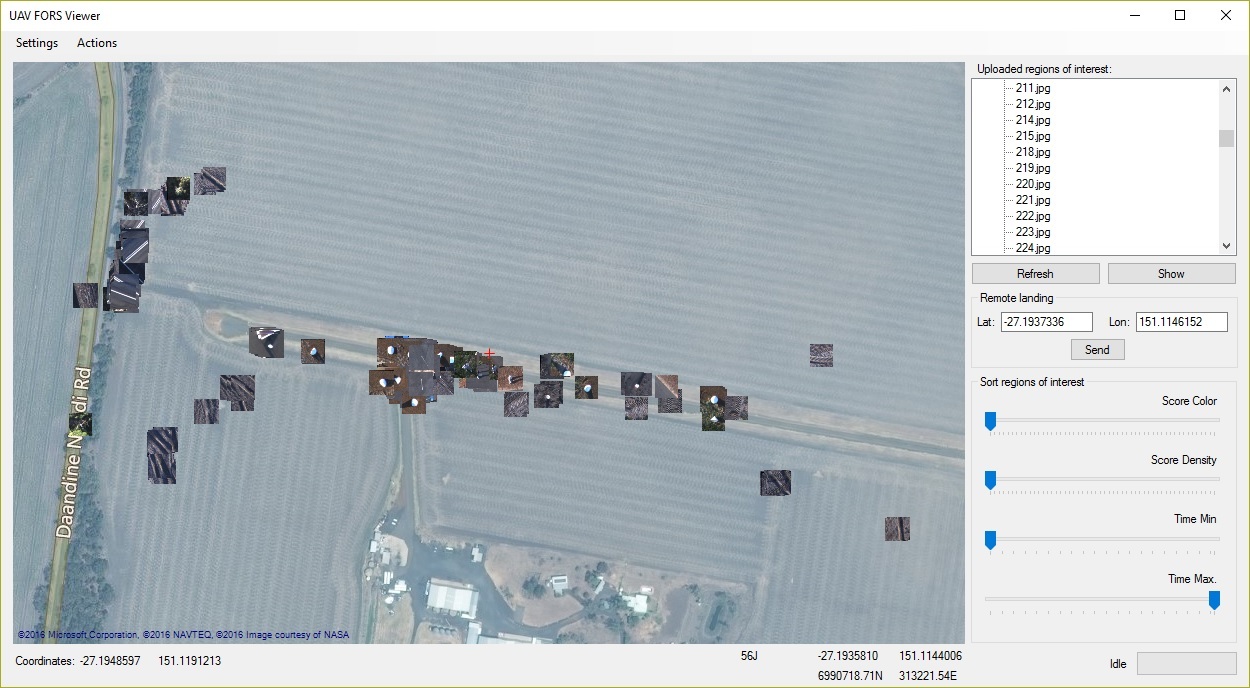 Aplicación en la estación del operadorLa máquina de vectores de apoyo para clasificar a una persona fue entrenada por nosotros en los ejemplos de fotografías tomadas durante los vuelos de prueba. Antes de calcular el descriptor HOG de cada una de las áreas de interés, realizamos algunas transformaciones geométricas en el área para llevar a la persona potencial en la imagen a una posición vertical, ya que el HOG tradicional funciona bien para clasificar a la persona solo en una posición de pie.Clasificación de las regiones de interés a bordo del dron: contorno rojo: la región está clasificada como no persona; el contorno verde: la región se clasifica como una personaDado que la tarea no era solo encontrar una persona, sino también elegir un lugar adecuado para el aterrizaje, además de las operaciones anteriores, el sistema de visión por computadora en el avión principal se programó para clasificar el territorio sobre el que volaba el avión. Entre las posibles clases se identificaron: tierra, asfalto, pasto, arbustos y árboles, obstáculos no especificados; La clasificación se basa en la información sobre el color y la heterogeneidad de la imagen en un lugar determinado. Cuando el operador de la estación de trabajo necesita tomar una decisión sobre el sitio de aterrizaje, puede solicitar información de la aeronave sobre la clasificación de la sección del mapa de interés.
Aplicación en la estación del operadorLa máquina de vectores de apoyo para clasificar a una persona fue entrenada por nosotros en los ejemplos de fotografías tomadas durante los vuelos de prueba. Antes de calcular el descriptor HOG de cada una de las áreas de interés, realizamos algunas transformaciones geométricas en el área para llevar a la persona potencial en la imagen a una posición vertical, ya que el HOG tradicional funciona bien para clasificar a la persona solo en una posición de pie.Clasificación de las regiones de interés a bordo del dron: contorno rojo: la región está clasificada como no persona; el contorno verde: la región se clasifica como una personaDado que la tarea no era solo encontrar una persona, sino también elegir un lugar adecuado para el aterrizaje, además de las operaciones anteriores, el sistema de visión por computadora en el avión principal se programó para clasificar el territorio sobre el que volaba el avión. Entre las posibles clases se identificaron: tierra, asfalto, pasto, arbustos y árboles, obstáculos no especificados; La clasificación se basa en la información sobre el color y la heterogeneidad de la imagen en un lugar determinado. Cuando el operador de la estación de trabajo necesita tomar una decisión sobre el sitio de aterrizaje, puede solicitar información de la aeronave sobre la clasificación de la sección del mapa de interés.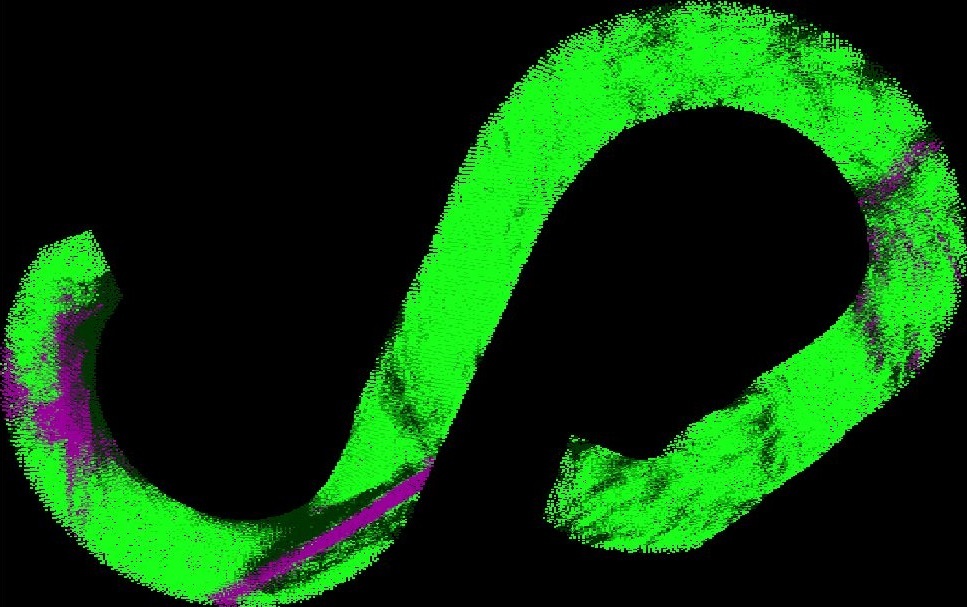 : - — , - — , —Además del dron principal descrito, decidimos usar uno auxiliar, que sería responsable de retransmitir en el canal de comunicación entre la estación terrestre del operador y el avión principal. De hecho, si nuestro dron principal está a varios kilómetros de la estación terrestre, entonces mantener comunicación de radio directa para recibir datos de telemetría y transmitir comandos se vuelve problemático, tanto debido a una disminución en la potencia de la señal al aumentar la distancia, como a la aparición de obstáculos en la línea de visión entre antenas en el suelo y a bordo del dispositivo. No siempre es posible hacer frente a la dificultad de establecer una comunicación de radio directa aumentando la potencia de la señal, ya que, en primer lugar, existen restricciones estatales que determinan la potencia de señal de radio máxima permitida, y en segundo lugar,un aumento de potencia puede no traer un resultado positivo, especialmente cuando el avión está a baja altitud a una gran distancia. Resolvemos este problema agregando un repetidor, que se encuentra a gran altitud, en la línea de visión tanto desde la estación del operador como desde el avión "en funcionamiento".Para transferir el equipo de retransmisión, utilizamos un ala voladora, hecha sobre la base de la popular plataforma Skywalker X8. En este caso, el ala voladora se ajusta a las restricciones causadas por el paisaje desconocido de la plataforma de lanzamiento, ya que puede lanzarse desde una catapulta ligera o desde un bungee, y puede aterrizar automáticamente, sin requerir un espacio abierto significativo para esto. Para que la aeronave aterrice sin tren de aterrizaje, sin recibir daños significativos, laminamos la parte inferior del casco con Kevlar y fibra de vidrio. Además, para aumentar la resistencia estructural y proporcionar la posibilidad de volar a velocidades más altas, el borde delantero del ala también estaba laminado con fibra de vidrio. El X8 estaba equipado con un motor de 710 KV clasificado para baterías de polímero de litio de cinco celdas,y una batería para este motor por 16 amperios horas de seis celdas. Debido al hecho de que usamos una batería con un voltaje más alto que el voltaje nominal del motor, tuvimos que proporcionar una entrada de aire adicional para enfriar en el diseño. Para el motor, se utilizó un regulador de velocidad de 70 A y una hélice plegable de 9.5x8. En elevons, entregamos servo HS-5625MG de alta calidad de Hitec; los servidores tienen un margen significativo en el rendimiento, lo que debería minimizar la posibilidad de perder superficies de control, cada una de las cuales es crítica en el caso de un ala voladora. Además, a bordo había baterías pequeñas adicionales para aviónica y un sistema de terminación de vuelo de emergencia, así como un controlador de vuelo (Pixhawk). Como resultado, las características del dispositivo fueron las siguientes: peso: 3,5 kilogramos,velocidad máxima: 35 m / s, velocidad de crucero: 25 m / s, tiempo de vuelo: hasta 55 minutos, distancia recorrida: más de 80 km.
: - — , - — , —Además del dron principal descrito, decidimos usar uno auxiliar, que sería responsable de retransmitir en el canal de comunicación entre la estación terrestre del operador y el avión principal. De hecho, si nuestro dron principal está a varios kilómetros de la estación terrestre, entonces mantener comunicación de radio directa para recibir datos de telemetría y transmitir comandos se vuelve problemático, tanto debido a una disminución en la potencia de la señal al aumentar la distancia, como a la aparición de obstáculos en la línea de visión entre antenas en el suelo y a bordo del dispositivo. No siempre es posible hacer frente a la dificultad de establecer una comunicación de radio directa aumentando la potencia de la señal, ya que, en primer lugar, existen restricciones estatales que determinan la potencia de señal de radio máxima permitida, y en segundo lugar,un aumento de potencia puede no traer un resultado positivo, especialmente cuando el avión está a baja altitud a una gran distancia. Resolvemos este problema agregando un repetidor, que se encuentra a gran altitud, en la línea de visión tanto desde la estación del operador como desde el avión "en funcionamiento".Para transferir el equipo de retransmisión, utilizamos un ala voladora, hecha sobre la base de la popular plataforma Skywalker X8. En este caso, el ala voladora se ajusta a las restricciones causadas por el paisaje desconocido de la plataforma de lanzamiento, ya que puede lanzarse desde una catapulta ligera o desde un bungee, y puede aterrizar automáticamente, sin requerir un espacio abierto significativo para esto. Para que la aeronave aterrice sin tren de aterrizaje, sin recibir daños significativos, laminamos la parte inferior del casco con Kevlar y fibra de vidrio. Además, para aumentar la resistencia estructural y proporcionar la posibilidad de volar a velocidades más altas, el borde delantero del ala también estaba laminado con fibra de vidrio. El X8 estaba equipado con un motor de 710 KV clasificado para baterías de polímero de litio de cinco celdas,y una batería para este motor por 16 amperios horas de seis celdas. Debido al hecho de que usamos una batería con un voltaje más alto que el voltaje nominal del motor, tuvimos que proporcionar una entrada de aire adicional para enfriar en el diseño. Para el motor, se utilizó un regulador de velocidad de 70 A y una hélice plegable de 9.5x8. En elevons, entregamos servo HS-5625MG de alta calidad de Hitec; los servidores tienen un margen significativo en el rendimiento, lo que debería minimizar la posibilidad de perder superficies de control, cada una de las cuales es crítica en el caso de un ala voladora. Además, a bordo había baterías pequeñas adicionales para aviónica y un sistema de terminación de vuelo de emergencia, así como un controlador de vuelo (Pixhawk). Como resultado, las características del dispositivo fueron las siguientes: peso: 3,5 kilogramos,velocidad máxima: 35 m / s, velocidad de crucero: 25 m / s, tiempo de vuelo: hasta 55 minutos, distancia recorrida: más de 80 km. Cabe señalar que agregar un avión adicional al sistema para aumentar el área de cobertura de la comunicación conduce al problema de organizar la comunicación en sí, ya que en este caso, además de analizar la telemetría desde el dron principal y enviarle comandos, la estación base debe admitir la comunicación a gran escala con el avión auxiliar aparato. Por supuesto, esta comunicación se puede organizar agregando dos módems de radio adicionales (uno para el dron auxiliar, el otro para la estación terrestre) que funcionan en un canal que no interfiere con el equipo que ya está en el sistema. Sin embargo, esta opción no es óptima debido a los costos adicionales y la falta de escalabilidad al agregar nuevos drones al sistema.La mejor opción es utilizar un transceptor de radio existente para comunicarse con la aeronave auxiliar. En este caso, el esquema de comunicación en el sistema se ve como se muestra en el siguiente diagrama.
Cabe señalar que agregar un avión adicional al sistema para aumentar el área de cobertura de la comunicación conduce al problema de organizar la comunicación en sí, ya que en este caso, además de analizar la telemetría desde el dron principal y enviarle comandos, la estación base debe admitir la comunicación a gran escala con el avión auxiliar aparato. Por supuesto, esta comunicación se puede organizar agregando dos módems de radio adicionales (uno para el dron auxiliar, el otro para la estación terrestre) que funcionan en un canal que no interfiere con el equipo que ya está en el sistema. Sin embargo, esta opción no es óptima debido a los costos adicionales y la falta de escalabilidad al agregar nuevos drones al sistema.La mejor opción es utilizar un transceptor de radio existente para comunicarse con la aeronave auxiliar. En este caso, el esquema de comunicación en el sistema se ve como se muestra en el siguiente diagrama.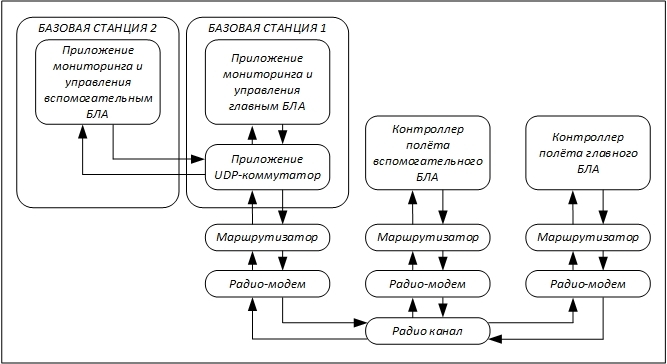
Conclusión
Según los requisitos de la competencia, para el paso a la parte final, cada uno de los aviones descritos voló más de cinco horas; Durante estos vuelos de prueba, hemos identificado y corregido muchos problemas y errores pequeños y significativos. Nuestro informe de video para esta etapa se veía así:Uno de los errores más desagradables en el diseño mecánico que notamos durante los vuelos preparatorios fue una asimetría significativa de la carga en los motores del helicóptero durante la conversión del modo avión al helicóptero. El hecho es que un ángulo de ataque positivo del ala del avión a bajas velocidades desvía los haces con los motores de helicóptero hacia atrás, de modo que dos motores más cercanos a la cola del avión reciben una gran carga durante la conversión. Además, el momento reactivo de la hélice del avión crea una carga adicional en los motores del lado izquierdo, de modo que el motor trasero izquierdo es el más intenso. En nuestro caso, tales irregularidades condujeron varias veces al mal funcionamiento de la planta de energía y al comportamiento inestable de la aeronave, que una vez terminó en una caída con daños severos en el casco. Por el momentoCuando identificamos el motivo del comportamiento incorrecto del dispositivo (tres meses antes de la competencia), era demasiado tarde para hacer cambios en la mecánica o intentar ajustar el programa de conversión, por lo que nos arriesgamos a seguir participando en el desafío, sabiendo que nuestro diseño no tiene redundancia en caso de accidente . Sin embargo, intentamos de todas las formas posibles minimizar la posibilidad de un mal funcionamiento, controlando en la mayor medida posible la capacidad de servicio de todos los elementos, conexiones y accesorios antes de cada vuelo.intentamos de todas las formas posibles minimizar la posibilidad de un mal funcionamiento, al tiempo que controlamos al máximo la capacidad de servicio de todos los elementos, conexiones y accesorios antes de cada vuelo.intentamos de todas las formas posibles minimizar la posibilidad de un mal funcionamiento, al tiempo que controlamos al máximo la capacidad de servicio de todos los elementos, conexiones y accesorios antes de cada vuelo.Desafortunadamente, las precauciones que tomamos no fueron suficientes, y nuestro avión quad se estrelló durante uno de los vuelos de prueba que hicimos en Australia para verificar la integridad estructural después de ensamblar el dispositivo en el sitio de la competencia. En caso de un choque, toda la estructura sufrió daños importantes, por lo que no fue posible reparar el aparato e intentar completar al menos parte de la misión. Sin embargo, los organizadores simpatizaron con nuestra situación y nos dieron permiso para volar con un dispositivo auxiliar para verificar el alcance de nuestras comunicaciones de radio y la capacidad de controlar el dispositivo más allá de la línea de visión.Al final, vale la pena decir que ninguno de los equipos de este año pudo cumplir plenamente la misión de la competencia, que se asoció con la pérdida de aeronaves por varias razones: accidente, incendio, vuelo fuera del espacio de vuelo asignado y, por regla general, flotando en un árbol. Durante el desafío, el equipo de TU Delft (el diseño mecánico original y un modelo de prueba del sistema de visión por computadora de Parrot, un video sobre un avión no tripulado aquí ) y Canberra UAV (entregaron una muestra de sangre, pero se estrelló un helicóptero auxiliar, un video sobre un avión no tripulado aquí ) fueron los más destacados .Para nosotros, como para otros equipos, el desafío sirvió como una excelente plataforma para probar suerte y comunicarnos con profesionales de drones de todo el mundo. Adquirimos una gran experiencia y recopilamos una gran cantidad de material que nos ayudará en nuestros proyectos personales y en la preparación para las próximas competiciones.Materiales
" UAV Challenge Medical Express 2016 Rules" . Un artículo de los organizadores del desafío sobre las estadísticas y la historia de la competencia.» Descripción del éxito del UAV Canberra por Andrew Trijell, el líder ideológico del equipo.Source: https://habr.com/ru/post/es399699/
All Articles