Los científicos han desarrollado un chip para la planificación del movimiento del robot en tiempo real
 Si alguna vez has visto cómo funcionan las versiones de demostración de los robots, probablemente hayas notado que el robot puede "congelarse" durante mucho tiempo antes de continuar moviéndose. Podría pensar que de esta manera el robot reflexiona sobre en qué punto y en qué camino moverse. Esta suposición no está lejos de la verdad: en este momento, el procesador procesa las operaciones de planificación de movimiento, que a menudo lleva mucho tiempo.Investigadores de la Universidad de Duke han encontrado una manera de acelerar la planificación del movimiento del robot tres veces utilizando una vigésima parte de la potencia requerida hoy. Su solución se basa en un procesador especializado que puede realizar la parte más laboriosa del trabajo, verificando todas las posibles colisiones en todo el rango del movimiento del robot, con alta eficiencia.La planificación de movimiento, por ejemplo, para un brazo robótico implica principalmente la creación de un mapa de ruta probabilístico. Es un gráfico que consta de puntos en un espacio libre de obstáculos con líneas de costillas que conectan estos puntos para que cada movimiento entre ellos no conduzca a una colisión. De hecho, el planificador de movimiento selecciona los puntos de inicio y finalización en el gráfico, y luego determina la forma más efectiva de moverse para ir de un punto a otro.
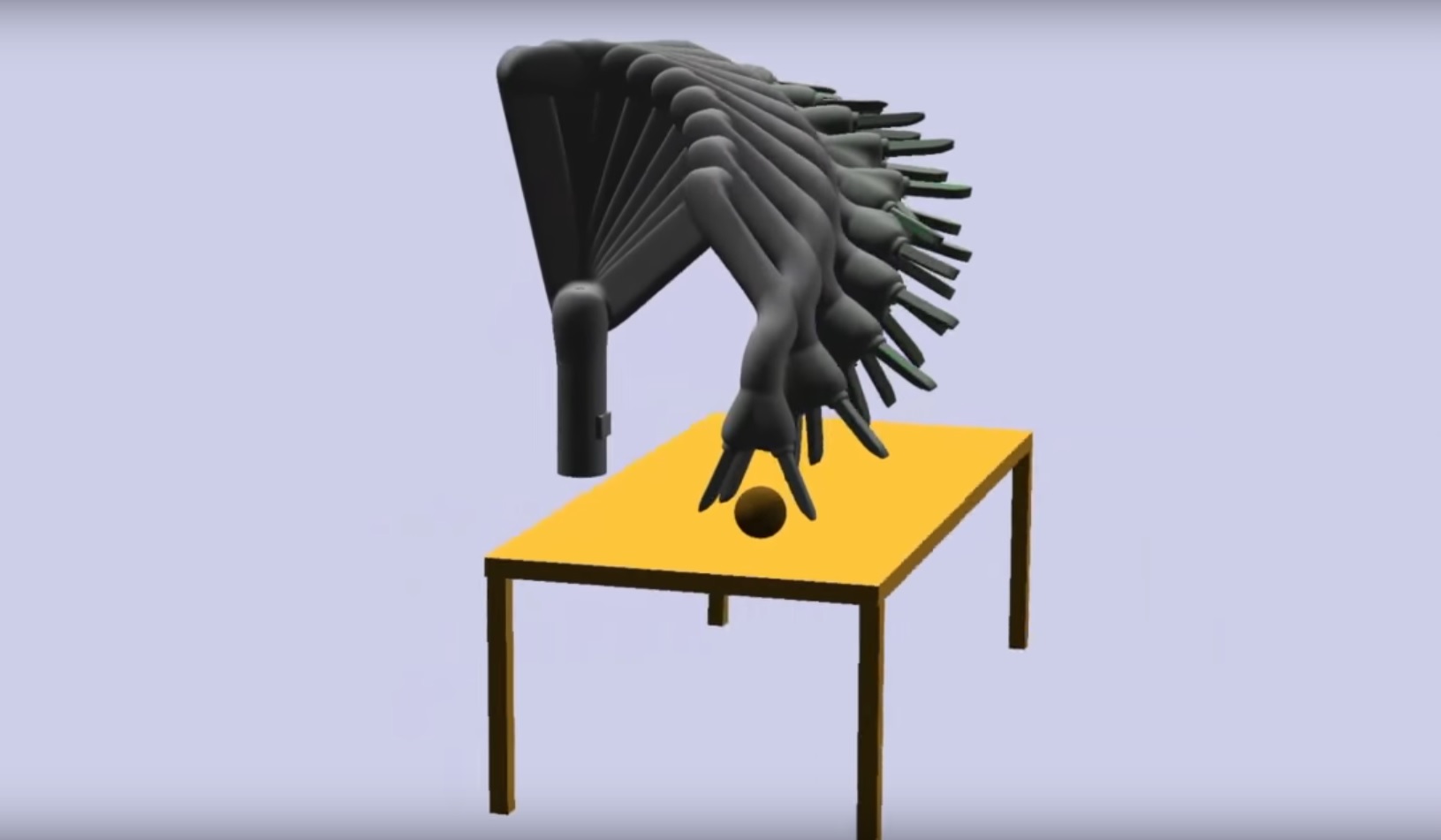
Si alguna vez has visto cómo funcionan las versiones de demostración de los robots, probablemente hayas notado que el robot puede "congelarse" durante mucho tiempo antes de continuar moviéndose. Podría pensar que de esta manera el robot reflexiona sobre en qué punto y en qué camino moverse. Esta suposición no está lejos de la verdad: en este momento, el procesador procesa las operaciones de planificación de movimiento, que a menudo lleva mucho tiempo.Investigadores de la Universidad de Duke han encontrado una manera de acelerar la planificación del movimiento del robot tres veces utilizando una vigésima parte de la potencia requerida hoy. Su solución se basa en un procesador especializado que puede realizar la parte más laboriosa del trabajo, verificando todas las posibles colisiones en todo el rango del movimiento del robot, con alta eficiencia.La planificación de movimiento, por ejemplo, para un brazo robótico implica principalmente la creación de un mapa de ruta probabilístico. Es un gráfico que consta de puntos en un espacio libre de obstáculos con líneas de costillas que conectan estos puntos para que cada movimiento entre ellos no conduzca a una colisión. De hecho, el planificador de movimiento selecciona los puntos de inicio y finalización en el gráfico, y luego determina la forma más efectiva de moverse para ir de un punto a otro. Los algoritmos de planificación de movimiento buscan la ruta óptima de un punto a otro, lo que le permite evitar obstáculos (izquierda). Un mapa de ruta probabilístico con bordes que conectan puntos en el espacio libre (derecha).En teoría, suena bastante simple, pero en la práctica, debe tener en cuenta el hecho de que está trabajando con un brazo robótico. Y cuando el cepillo se mueve de un punto a otro, el antebrazo puede chocar con un obstáculo. El área en la que se mueve el brazo del robot se denomina "volumen de trabajo".
Los algoritmos de planificación de movimiento buscan la ruta óptima de un punto a otro, lo que le permite evitar obstáculos (izquierda). Un mapa de ruta probabilístico con bordes que conectan puntos en el espacio libre (derecha).En teoría, suena bastante simple, pero en la práctica, debe tener en cuenta el hecho de que está trabajando con un brazo robótico. Y cuando el cepillo se mueve de un punto a otro, el antebrazo puede chocar con un obstáculo. El área en la que se mueve el brazo del robot se denomina "volumen de trabajo".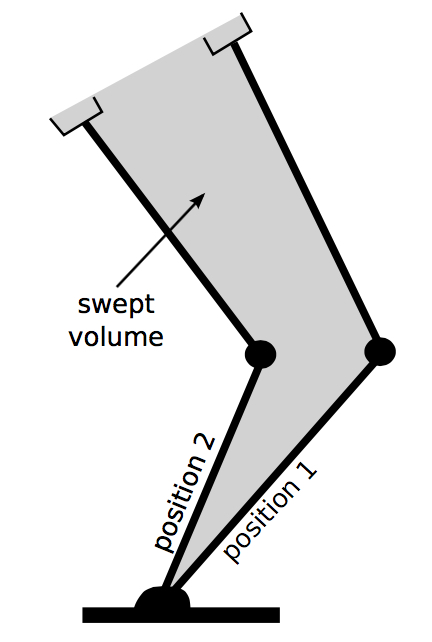 El volumen de trabajo es el espacio en el que el robot cambia su posición de una posición a otra.Los resultados del estudio mostraron que la detección de obstáculos lleva más del 99% del tiempo computacional. Los cálculos preliminares se realizan cuando el robot está configurado. Crea un mapa, que consta de aproximadamente 150 mil aristas, que describe las posibles trayectorias del robot, al tiempo que evita las auto colisiones y las colisiones con cosas que no cambian su posición, por ejemplo, el género.150 mil costillas es demasiado para el prototipo del sistema de equipo de la Universidad de Duke. Un número más razonable es cercano a 1000, por lo que los investigadores tuvieron que encontrar una manera de reducir su número.Para acelerar y simplificar todo el proceso, los investigadores primero modelaron alrededor de 10 mil escenarios con diferentes números de obstáculos ubicados al azar de diferentes tamaños, y luego verificaron qué bordes del mapa utiliza el sistema para planificar el movimiento. Costillas raramente usadas fueron removidas del mapa. Después de varias iteraciones de reducir y volver a verificar los resultados en un ejemplo, el número de bordes resultó ser inferior a mil. Al mismo tiempo, la reducción no afectó la capacidad de resolver dos problemas principales del planificador de movimiento: velocidad de procesamiento lenta y alto consumo de energía.Limitar el número de bordes en el mapa a un valor aceptable es muy importante, porque las capacidades del procesador que procesa las operaciones de planificación son limitadas. En este caso, el procesador (circuito integrado lógico programable ( FPGA )) se programa con una serie de circuitos de detección de colisión, cada uno de los cuales corresponde a un borde en el mapa. Por lo tanto, el tamaño de la tarjeta está limitado por el número de dichos circuitos que pueden caber en el FPGA, un máximo de varios miles.La tecnología de los científicos de la Universidad de Duke funciona al dividir el espacio de trabajo en miles de vóxeles. El algoritmo determina si una trayectoria de objeto preprogramada está incrustada en uno de los vóxeles. Gracias a los FPGA, la tecnología verifica miles de rutas al mismo tiempo y luego cose la ruta más corta utilizando las opciones seguras restantes. El robot solo puede ejecutarlo.En la salida, los científicos recibieron una aceleración significativa: no importa cuántos bordes en la tarjeta, la velocidad de procesamiento de FPGA de toda la tarjeta fue de 50 nanosegundos por píxel. En un ejemplo particularmente complejo, el procesamiento tomó un poco más de 0.6 ms. El programador, que funcionaba sobre la base de un procesador Intel Xeon de cuatro núcleos con una frecuencia de reloj de 3,5 gigahercios, hizo frente a esta tarea en 2.738 ms. Los procesadores convencionales consumen aproximadamente 200-300 vatios de electricidad durante la planificación del movimiento, y el desarrollo de científicos de la Universidad de Duke es inferior a 10 vatios.Ahora los robots industriales no usan planificadores de movimiento. Cuando se trata, por ejemplo, del ensamblaje de automóviles en una línea de ensamblaje utilizando robots, el entorno se planifica de tal manera que los robots puedan repetir ciegamente los mismos movimientos una y otra vez. Simplemente no tienen la oportunidad de cometer un error: las partes del automóvil cada vez se encuentran en el mismo lugar, y los robots se guardan en cajas especiales que los encierran de las personas. Pero si el robot utiliza algoritmos de planificación de movimiento en tiempo real, no podrá verse obstaculizado por personas que pasen por allí o por un mal funcionamiento del transportador: los robots harán su trabajo con la precisión habitual.La planificación del tráfico en tiempo real ahorra tiempo y costos para la ingeniería del entorno del entorno del robot. Los científicos han estado estudiando la tecnología de planificación durante los últimos 30 años, y los avances recientes han permitido crear un plan de movimiento mejorado en cuestión de segundos. Los enfoques existentes, con algunas excepciones, dependen de las capacidades de los procesadores centrales o más rápidos, pero también de GPU que consumen más energía. Según los científicos, el procesador central es bueno para resolver diferentes tipos de tareas, pero no puede competir con un procesador especialmente diseñado para una sola tarea específica.Dinesh Manocha, profesor de la Universidad de Carolina del Norte en Chapel Hill, que trabaja en un planificador de movimiento en tiempo real en GPU, está de acuerdo en que los FPGA tienen el potencial de aumentar la eficiencia de la planificación del movimiento. Confía en que el desarrollo de los científicos encontrará su aplicación práctica en el futuro cercano: los robots se utilizan cada vez más en condiciones nuevas e inciertas, el papel de la planificación del tráfico solo aumentará con el tiempo.Startup Realtime Robotics comercializará científicos de tecnología. Como parte de este proyecto, los FPGA serán reemplazados por circuitos integrados especializados ( ASIC ), que pueden combinar más de 100 mil bordes. Dicha actualización permitirá a los robots trabajar en una amplia variedad de entornos.
El volumen de trabajo es el espacio en el que el robot cambia su posición de una posición a otra.Los resultados del estudio mostraron que la detección de obstáculos lleva más del 99% del tiempo computacional. Los cálculos preliminares se realizan cuando el robot está configurado. Crea un mapa, que consta de aproximadamente 150 mil aristas, que describe las posibles trayectorias del robot, al tiempo que evita las auto colisiones y las colisiones con cosas que no cambian su posición, por ejemplo, el género.150 mil costillas es demasiado para el prototipo del sistema de equipo de la Universidad de Duke. Un número más razonable es cercano a 1000, por lo que los investigadores tuvieron que encontrar una manera de reducir su número.Para acelerar y simplificar todo el proceso, los investigadores primero modelaron alrededor de 10 mil escenarios con diferentes números de obstáculos ubicados al azar de diferentes tamaños, y luego verificaron qué bordes del mapa utiliza el sistema para planificar el movimiento. Costillas raramente usadas fueron removidas del mapa. Después de varias iteraciones de reducir y volver a verificar los resultados en un ejemplo, el número de bordes resultó ser inferior a mil. Al mismo tiempo, la reducción no afectó la capacidad de resolver dos problemas principales del planificador de movimiento: velocidad de procesamiento lenta y alto consumo de energía.Limitar el número de bordes en el mapa a un valor aceptable es muy importante, porque las capacidades del procesador que procesa las operaciones de planificación son limitadas. En este caso, el procesador (circuito integrado lógico programable ( FPGA )) se programa con una serie de circuitos de detección de colisión, cada uno de los cuales corresponde a un borde en el mapa. Por lo tanto, el tamaño de la tarjeta está limitado por el número de dichos circuitos que pueden caber en el FPGA, un máximo de varios miles.La tecnología de los científicos de la Universidad de Duke funciona al dividir el espacio de trabajo en miles de vóxeles. El algoritmo determina si una trayectoria de objeto preprogramada está incrustada en uno de los vóxeles. Gracias a los FPGA, la tecnología verifica miles de rutas al mismo tiempo y luego cose la ruta más corta utilizando las opciones seguras restantes. El robot solo puede ejecutarlo.En la salida, los científicos recibieron una aceleración significativa: no importa cuántos bordes en la tarjeta, la velocidad de procesamiento de FPGA de toda la tarjeta fue de 50 nanosegundos por píxel. En un ejemplo particularmente complejo, el procesamiento tomó un poco más de 0.6 ms. El programador, que funcionaba sobre la base de un procesador Intel Xeon de cuatro núcleos con una frecuencia de reloj de 3,5 gigahercios, hizo frente a esta tarea en 2.738 ms. Los procesadores convencionales consumen aproximadamente 200-300 vatios de electricidad durante la planificación del movimiento, y el desarrollo de científicos de la Universidad de Duke es inferior a 10 vatios.Ahora los robots industriales no usan planificadores de movimiento. Cuando se trata, por ejemplo, del ensamblaje de automóviles en una línea de ensamblaje utilizando robots, el entorno se planifica de tal manera que los robots puedan repetir ciegamente los mismos movimientos una y otra vez. Simplemente no tienen la oportunidad de cometer un error: las partes del automóvil cada vez se encuentran en el mismo lugar, y los robots se guardan en cajas especiales que los encierran de las personas. Pero si el robot utiliza algoritmos de planificación de movimiento en tiempo real, no podrá verse obstaculizado por personas que pasen por allí o por un mal funcionamiento del transportador: los robots harán su trabajo con la precisión habitual.La planificación del tráfico en tiempo real ahorra tiempo y costos para la ingeniería del entorno del entorno del robot. Los científicos han estado estudiando la tecnología de planificación durante los últimos 30 años, y los avances recientes han permitido crear un plan de movimiento mejorado en cuestión de segundos. Los enfoques existentes, con algunas excepciones, dependen de las capacidades de los procesadores centrales o más rápidos, pero también de GPU que consumen más energía. Según los científicos, el procesador central es bueno para resolver diferentes tipos de tareas, pero no puede competir con un procesador especialmente diseñado para una sola tarea específica.Dinesh Manocha, profesor de la Universidad de Carolina del Norte en Chapel Hill, que trabaja en un planificador de movimiento en tiempo real en GPU, está de acuerdo en que los FPGA tienen el potencial de aumentar la eficiencia de la planificación del movimiento. Confía en que el desarrollo de los científicos encontrará su aplicación práctica en el futuro cercano: los robots se utilizan cada vez más en condiciones nuevas e inciertas, el papel de la planificación del tráfico solo aumentará con el tiempo.Startup Realtime Robotics comercializará científicos de tecnología. Como parte de este proyecto, los FPGA serán reemplazados por circuitos integrados especializados ( ASIC ), que pueden combinar más de 100 mil bordes. Dicha actualización permitirá a los robots trabajar en una amplia variedad de entornos.Source: https://habr.com/ru/post/es400079/
All Articles