Creación y prueba de un motor sin escobillas.
En este artículo, nos gustaría hablar sobre cómo creamos un motor eléctrico desde cero: desde la idea y el primer prototipo hasta un motor completo que pasó todas las pruebas. Si este artículo le parece interesante, por separado, con más detalle, le informaremos sobre las etapas más interesantes de nuestro trabajo. En la imagen de izquierda a derecha: rotor, estator, conjunto de motor parcial, conjunto de motor
En la imagen de izquierda a derecha: rotor, estator, conjunto de motor parcial, conjunto de motorEntrada
Los motores eléctricos aparecieron hace más de 150 años, pero durante este tiempo su diseño no sufrió ningún cambio especial: un rotor giratorio, devanados del estator de cobre, cojinetes. Con los años, solo hubo una disminución en el peso de los motores eléctricos, un aumento en la eficiencia y también la precisión del control de velocidad.Hoy, gracias al desarrollo de la electrónica moderna y la aparición de potentes imanes basados en metales de tierras raras, es posible crear motores eléctricos " Brushless " potentes y al mismo tiempo compactos y livianos . Al mismo tiempo, debido a la simplicidad de su diseño, son los motores eléctricos más confiables jamás creados. La creación de dicho motor se discutirá en este artículo.Descripción del motor
En los “motores sin escobillas” no existe un elemento “cepillo”, familiar para todos al desarmar una herramienta eléctrica, cuya función es transferir corriente al devanado de un rotor giratorio. En los motores sin escobillas, se suministra corriente a los devanados de un estator no móvil, que, creando un campo magnético alternativamente en sus polos individuales, hace girar el rotor en el que están montados los imanes.El primer motor de este tipo fue impreso por nosotros como una impresora 3D como un experimento. En lugar de placas especiales hechas de acero eléctrico, utilizamos plástico ordinario para el cuerpo del rotor y el núcleo del estator, en el que se enrollaba una bobina de cobre. Se montaron imanes rectangulares de neodimio en el rotor. Naturalmente, dicho motor no era capaz de entregar la máxima potencia. Sin embargo, esto fue suficiente para que el motor gire hasta 20k rpm, después de lo cual el plástico no pudo soportarlo y el rotor del motor se desgarró y los imanes se dispersaron. Este experimento nos animó a crear un motor completo.Los primeros prototipos
Habiendo aprendido la opinión de los amantes de los modelos controlados por radio, como tarea, elegimos un motor para autos de carreras del tamaño "540", como el más popular. Este motor tiene unas dimensiones de 54 mm de longitud y 36 mm de diámetro. Hicimos elrotor del nuevo motor a partir de un solo imán cilíndrico de neodimio. Se pegó un imán epoxi a un eje mecanizado de acero para herramientas en una producción piloto. Cortamos el estator con un láser de un conjunto de placas de acero para transformadores de 0,5 mm de espesor. Cada placa se barnizó cuidadosamente y luego se pegó un estator terminado de aproximadamente 50 placas. Las placas se barnizaron para evitar cortocircuitos entre ellas y para excluir pérdidas de energía en las corrientes de Foucault que podrían ocurrir en el estator.
estator con un láser de un conjunto de placas de acero para transformadores de 0,5 mm de espesor. Cada placa se barnizó cuidadosamente y luego se pegó un estator terminado de aproximadamente 50 placas. Las placas se barnizaron para evitar cortocircuitos entre ellas y para excluir pérdidas de energía en las corrientes de Foucault que podrían ocurrir en el estator. La carcasa del motor estaba hecha de dos piezas de aluminio en forma de contenedor. El estator se ajusta firmemente a la carcasa de aluminio y se adapta bien a las paredes. Este diseño proporciona una buena refrigeración del motor.
La carcasa del motor estaba hecha de dos piezas de aluminio en forma de contenedor. El estator se ajusta firmemente a la carcasa de aluminio y se adapta bien a las paredes. Este diseño proporciona una buena refrigeración del motor.
Medida de rendimiento
Para lograr las máximas características de sus desarrollos, es necesario realizar una evaluación adecuada y una medición precisa de las características. Para hacer esto, diseñamos y montamos un dynostend especial.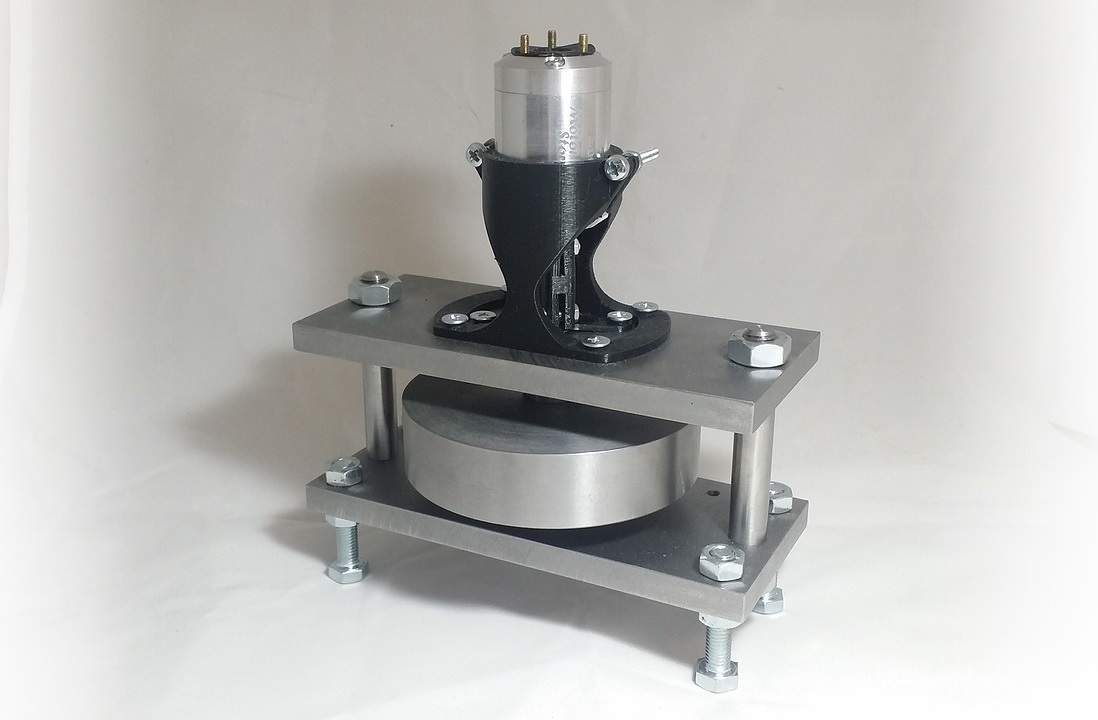 El elemento principal del soporte es una carga pesada en forma de arandela. Durante las mediciones, el motor gira una carga dada y la potencia de salida y el par motor se calculan por la velocidad angular y la aceleración.Para medir la velocidad de rotación de la carga, se utilizan un par de imanes en el eje y un sensor digital magnético A3144 basado en el efecto hall. Por supuesto, sería posible medir revoluciones por impulsos directamente de los devanados del motor, ya que este motor es síncrono. Sin embargo, la versión con el sensor es más confiable y funcionará incluso a velocidades muy bajas, en las cuales los pulsos serán ilegibles.Además de las revoluciones, nuestro stand puede medir varios parámetros más importantes:
El elemento principal del soporte es una carga pesada en forma de arandela. Durante las mediciones, el motor gira una carga dada y la potencia de salida y el par motor se calculan por la velocidad angular y la aceleración.Para medir la velocidad de rotación de la carga, se utilizan un par de imanes en el eje y un sensor digital magnético A3144 basado en el efecto hall. Por supuesto, sería posible medir revoluciones por impulsos directamente de los devanados del motor, ya que este motor es síncrono. Sin embargo, la versión con el sensor es más confiable y funcionará incluso a velocidades muy bajas, en las cuales los pulsos serán ilegibles.Además de las revoluciones, nuestro stand puede medir varios parámetros más importantes:- suministrar corriente (hasta 30 A) utilizando un sensor de corriente basado en el efecto hall ACS712;
- Tensión de alimentación. Medido directamente a través del ADC del microcontrolador, a través de un divisor de voltaje;
- temperatura dentro / fuera del motor. La temperatura se mide por la resistencia térmica del semiconductor;
Para recopilar todos los parámetros de los sensores y transferirlos a una computadora, el microcontrolador AVR mega series se utiliza en la placa nano Arduino. El microcontrolador se comunica con la computadora a través del puerto COM. Para procesar las lecturas, se escribió un programa especial que registra, promedia y demuestra los resultados de la medición.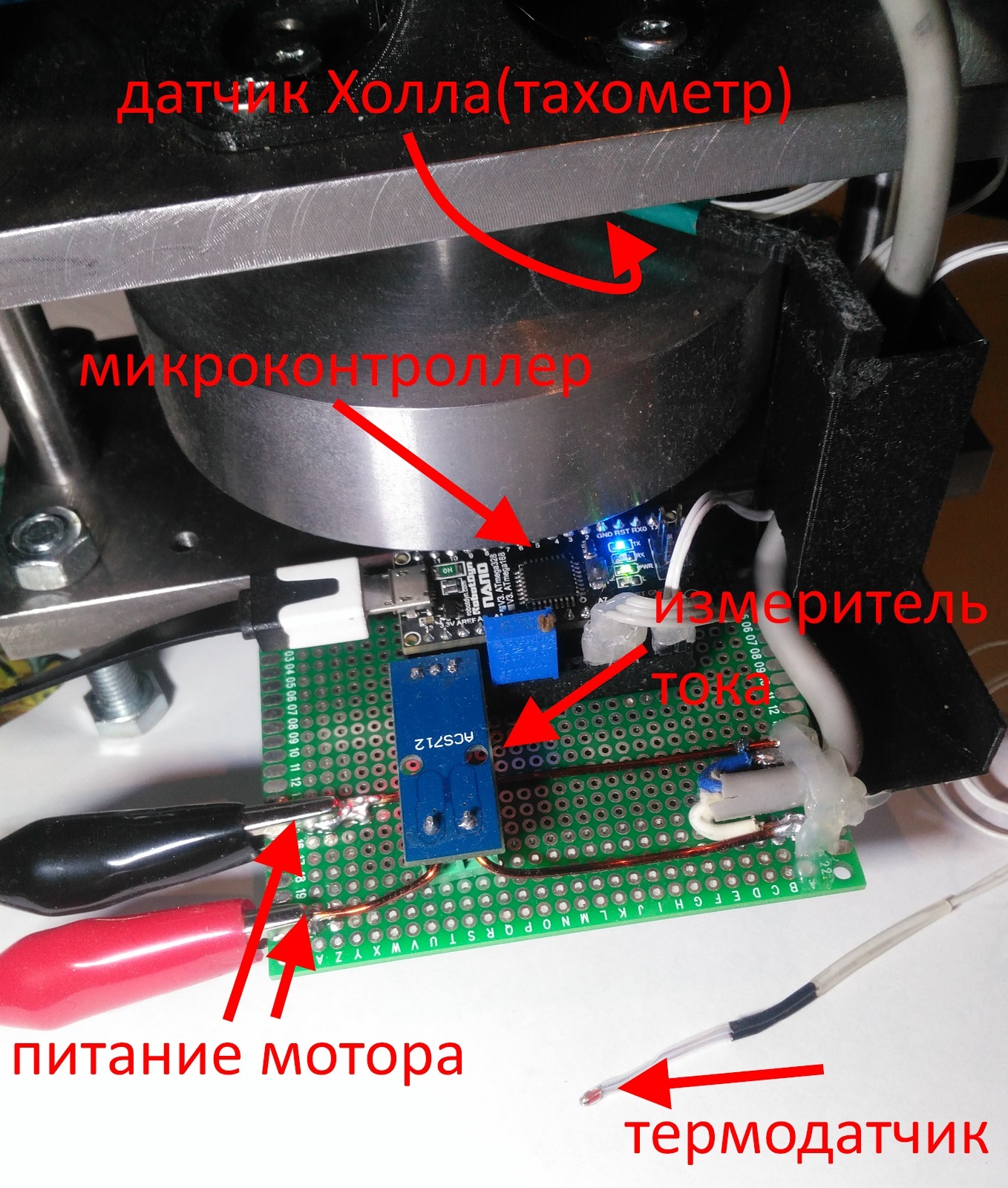 Como resultado, nuestro stand puede medir las siguientes características del motor en cualquier momento:
Como resultado, nuestro stand puede medir las siguientes características del motor en cualquier momento:- consumo actual;
- consumo de energía;
- consumo de energía;
- potencia de salida;
- revoluciones de eje;
- momento en el eje;
- Eficiencia
- el poder va al calor;
- temperatura dentro del motor.
Video que muestra el trabajo del stand:Resultados de la prueba
Para probar el rendimiento del soporte, primero lo probamos en un motor conmutador R540-6022 convencional. Existen pocos parámetros conocidos para este motor, pero esto fue suficiente para evaluar los resultados de la medición, que resultaron ser bastante parecidos a los de fábrica.Entonces nuestro motor ya fue probado. Naturalmente, fue capaz de mostrar una mejor eficiencia (65% versus 45%) y al mismo tiempo un mayor momento (1200 versus 250 g por cm) que un motor ordinario. La medición de temperatura también dio resultados bastante buenos, durante las pruebas el motor no se calentó por encima de 80 grados.Pero por el momento las mediciones aún no son definitivas. No pudimos medir el motor en el rango de velocidad completa debido a la potencia limitada de la fuente de energía. También tenemos que comparar nuestro motor con motores de competidores similares y probarlo "en batalla", poniéndolo en un auto controlado por radio y hablando en competiciones. Source: https://habr.com/ru/post/es400337/
All Articles