Por alguna razón, pocas personas en Rusia conocen la situación real con el uso de varias robótica en el sitio de emergencia de la central nuclear de Fukushima. El público en general tiene un estereotipo inequívoco:

De hecho, en varios trabajos durante la liquidación de las consecuencias del accidente en la central nuclear de Fukushima (probablemente escribiré más por el FAE), se usaron y se están utilizando cientos de unidades de varios robots a control remoto. La escala de uso de los automóviles a control remoto es incomparablemente mayor que en la planta de energía nuclear de Chernobyl, por las simples razones de que todo este equipo se ha desarrollado enormemente en los últimos 30 años y porque el accidente en la planta de energía nuclear de Chernobyl está más extendido que en la planta de energía nuclear de Chernobyl.
 Robot aspirador, versión japonesa para Fukushima.
Robot aspirador, versión japonesa para Fukushima.Antes de mirar los robots, vale la pena al menos en términos generales imaginar que el trabajo se llevó a cabo en la FAES durante los últimos 6 años desde el accidente.
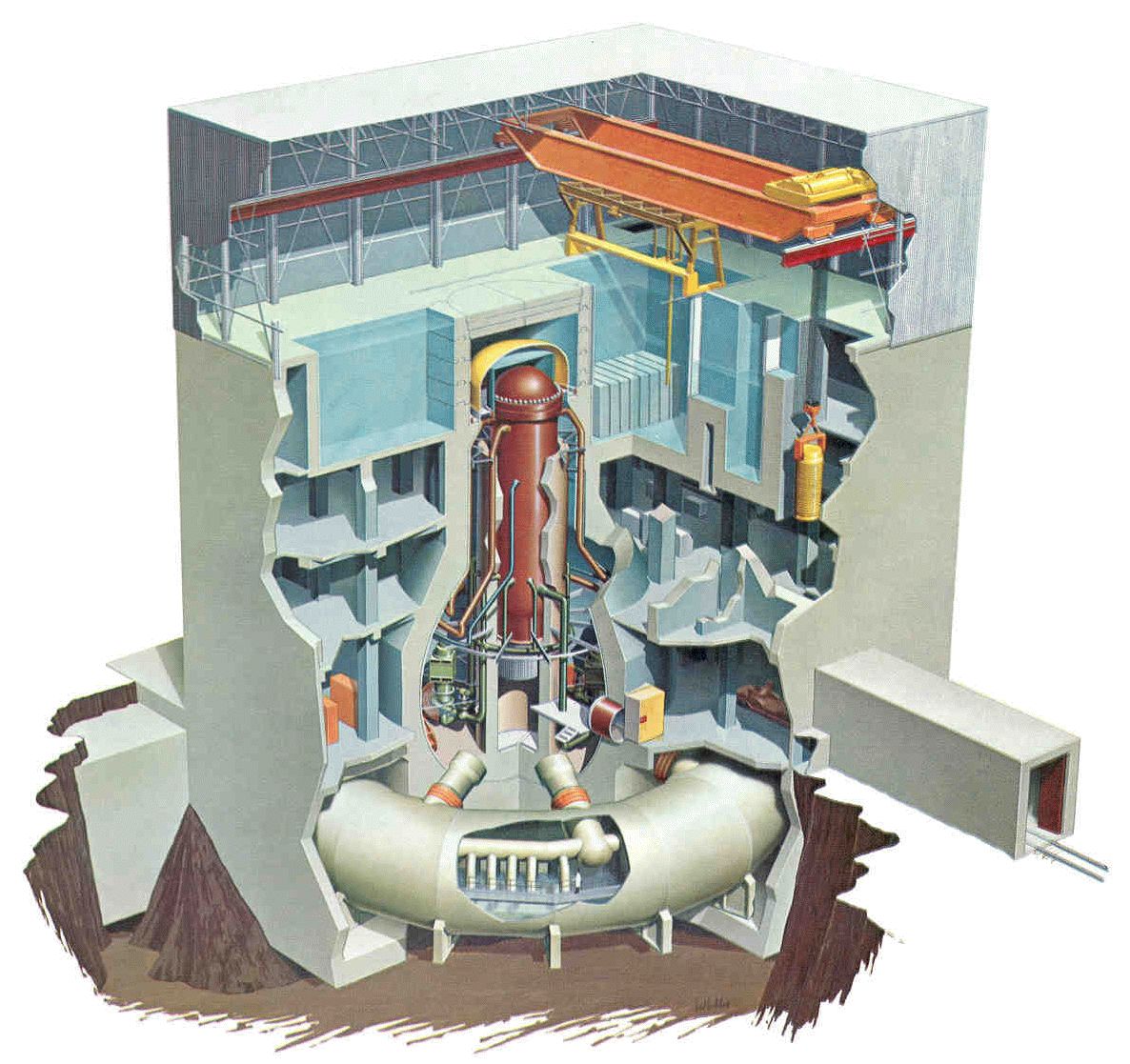 Esta imagen simplificada da una idea general del diseño de los bloques de la central nuclear de Fukushima: el reactor aquí en el centro (marrón) está ubicado en el centro de un contenedor de hormigón en forma de pera, dentro del cual hay una gran cantidad de equipos. En la parte superior derecha del reactor hay un grupo de retención, justo debajo del reactor hay una sala para el control y las unidades de varillas de protección (a diferencia de PWR, en BWR se introducen en el AZ desde abajo). Debajo y alrededor del reactor hay una piscina de burbujas toroidales diseñada para condensar vapor en caso de una ruptura importante del recipiente del reactor principal.
Esta imagen simplificada da una idea general del diseño de los bloques de la central nuclear de Fukushima: el reactor aquí en el centro (marrón) está ubicado en el centro de un contenedor de hormigón en forma de pera, dentro del cual hay una gran cantidad de equipos. En la parte superior derecha del reactor hay un grupo de retención, justo debajo del reactor hay una sala para el control y las unidades de varillas de protección (a diferencia de PWR, en BWR se introducen en el AZ desde abajo). Debajo y alrededor del reactor hay una piscina de burbujas toroidales diseñada para condensar vapor en caso de una ruptura importante del recipiente del reactor principal.Después de llevar los reactores de los bloques 1, 2, 3 al estado de "apagado en frío" (es decir, enfriar el combustible gastado en el reactor a 100 ° C y menos) al final de 11 años, se
formularon las siguientes tareas:
- Reconocimiento de la situación de la radiación en lugares de difícil acceso: el recipiente del reactor, el contenedor, el burbujeador de torre y otros, donde a fines de 2011 la situación aún no se conocía (principalmente con los restos del combustible fundido)
- Reducción de la salida de agua y el viento de la radiactividad de los reactores, al eliminar las fugas (incluida la famosa pared de hielo), revestir parte de las paredes de los edificios, recolectar basura contaminada en contenedores donde esto aún no se ha hecho
- Preparación de sitios para la descarga de SNF de las piscinas de almacenamiento de los 4 bloques: limpieza de estructuras destruidas, mapeo de escombros en las piscinas de almacenamiento y su limpieza, organización de estructuras temporales sobre las piscinas y, finalmente, descarga de SNF en contenedores
- Descontaminación máxima de las instalaciones (es decir, limpieza de contaminantes de la superficie. Esto es necesario principalmente en interés de los trabajos de eliminación de SNF - para reducir el nivel de dosis del personal que llevará a cabo este trabajo
- Sellado de contenedores de reactores y posterior bombeo de agua radiactiva desde edificios de unidades de potencia.
- Desmontaje de residuos de combustible fundido altamente radioactivo (corium) en bloques 1,2,3
- Después de la liberación de los bloques de objetos peligrosos nucleares y radiactivos - desmontaje y organización de la "zona verde"
 Infografía a partir de bloques a principios de 2016.
Infografía a partir de bloques a principios de 2016.Se supone que todo el plan se implementará en 30-40 años, y lo más difícil aquí es la descarga de combustible nuclear gastado de las piscinas de almacenamiento llenas de escombros y la eliminación de corio de los restos de los recipientes del reactor. En este momento, el SNF está completamente descargado del bloque 4 (donde, afortunadamente, no estaba en el reactor, sino solo en la piscina de retención, es decir, el bloque 4 se puede convertir en un césped verde lo suficientemente pronto), y la construcción de una carcasa protectora para los extremos de descarga SNF del bloque 3, está previsto que comience en 2017.
Con los bloques 1, 2, la situación es la más difícil: aquí para la construcción de un refugio para la limpieza de SNF, primero es necesario desmontar los escombros y descontaminar parcialmente para reducir los campos, lo que TEPCO (el propietario de la planta de energía nuclear) está haciendo ahora.
 Vista general del sitio de la central nuclear de Fukushima en 2016. Por cierto, hay un buen plan que explica todos estos tanques y algunos edificios.
Vista general del sitio de la central nuclear de Fukushima en 2016. Por cierto, hay un buen plan que explica todos estos tanques y algunos edificios.Por lo tanto, los robots participan en absolutamente todos los trabajos que se describen anteriormente. Sí, por supuesto, todas estas son máquinas telecontroladas, principalmente de cable, no profundizaré en el debate terminológico aquí, consideraré que tales equipos son robots, o solo autónomos, y los llamaré robots.
 iRobot Packbot 510 es el primero de los utilizados en la FAES.
iRobot Packbot 510 es el primero de los utilizados en la FAES.Desde los primeros días del accidente, aún en su parte activa, surgió la cuestión de la inteligencia radiológica. TEPCO tenía una flota de robots iRobot Packbot, una máquina a gran escala, bastante conveniente para tales fines. Pusieron dosímetros en pakbots (parece que esta es generalmente una de las opciones estándar), cámaras de rayos gamma, sensores de presión, temperatura y humedad, y los enviaron a los bloques destruidos por las explosiones. Desafortunadamente, todo fue malo con los pakbots mientras se movían por las escaleras, y realizaron un reconocimiento en la planta baja y fuera de los bloques.
Entrenamiento de abril en el sitio de la FNPP con el robot guerrero iRobot.Después de un tiempo, se agregaron varios robots (de un diseño similar) desarrollados por el centro FuRO y la Universidad de Chiba: membrillo, hibisco, sakura, etc., según los desarrolladores que tienen la mejor inteligencia / mecánica cuando se mueven por terrenos difíciles. De hecho, estos robots ya en abril-mayo de 2011 permitieron explorar los pisos superiores de los bloques, dos de ellos se perdieron debido a roturas de cables.
Membrillo en reconocimiento dentro de la segunda unidad de la central nuclear de Fukushima, abril-julio de 2011.Además, al menos un avión no tripulado Honeywell T-HAWK proporcionado por el ejército japonés se usó para el reconocimiento aéreo y la vigilancia. Los militares y varios otros robots rastreadores tipo Garra también fueron generosos. Esta es una versión más pesada y segura en la ideología de Packbot.

Además del reconocimiento, casi instantáneamente, en las primeras semanas, para la eliminación de los escombros, comenzó el uso de equipos de construcción telecontrolados rehechos: varias excavadoras, excavadoras, camiones, que limpiaron con éxito los pasajes entre los bloques de escombros radiactivos.
 Robots utilizados para la limpieza de residuos radiactivos en el bloque 3 en mayo-junio de 2011. Incluyendo dos tradicionales para la industria nuclear Brokk'a
Robots utilizados para la limpieza de residuos radiactivos en el bloque 3 en mayo-junio de 2011. Incluyendo dos tradicionales para la industria nuclear Brokk'aSe encontró una aplicación interesante para las bombas robóticas de hormigón Putzmeister: verter agua desde arriba de los bloques y observar la situación desde una barrera de 70 metros. La gestión de tales máquinas se llevó a cabo por aire desde salas móviles protegidas con plomo, que se instalaron cerca del lugar de trabajo.
 El control remoto de Putzmeister con un auge de 62 metros, a principios de abril de 2011, la tarea es el reconocimiento y el suministro de agua a la parte superior del bloque destruido.
El control remoto de Putzmeister con un auge de 62 metros, a principios de abril de 2011, la tarea es el reconocimiento y el suministro de agua a la parte superior del bloque destruido.Creo que la aparición instantánea de dicho equipo en el sitio de la FNPP se debe al hecho de que en los últimos 10 años se ha hecho popular agregar la posibilidad de control externo desde el control remoto a las máquinas de construcción, es decir. esencialmente control completamente electrónico en el interior, que ya es fácil de llevar al menos a otro hemisferio de la Tierra. Con tal técnica, es suficiente colgarlo con cámaras y equiparlo con el canal de telecomunicaciones correcto, y un robot controlado a distancia está listo. Desafortunadamente, en 1986, para lograr ese resultado, fue necesario atormentarnos y, de hecho, el problema no se resolvió: la velocidad para eliminar las consecuencias del accidente resultó ser más importante que la carga de dosis de las personas.

Finalmente, desde 2011, la tecnología remota resistente a la radiación, estándar para la industria nuclear, también se ha utilizado en el sitio de FAES: robots BROKK pesados (¡más de una tonelada!) Y manipuladores de carros móviles Walischmiller, básicamente de nuevo en el desmantelamiento de desechos radiactivos, trabajando en el más caliente puntos.
Por extraño que parezca, todo este equipo no tenía problemas específicos asociados con la radiación, bueno, o de alguna manera estaba en silencio (lo cual es dudoso). Sin embargo, la robótica sin protección se usó en campos bajos (no más de 15 rayos X por hora), y para condiciones más severas, a veces se colocó protección contra el plomo en la electrónica (por ejemplo, 3 bombas de concreto a control remoto Putzmeister, que estaban cerca de los bloques destruidos por explosiones y vertieron agua desde arriba)
 La situación de la radiación el 23/03/2011: una semana después del final de la fase activa del accidente. La cifra más grande de 130 mSv es 13 R / h, en comparación con ~ 1000 R / h en el sitio de Chernobyl el 6 de mayo.
La situación de la radiación el 23/03/2011: una semana después del final de la fase activa del accidente. La cifra más grande de 130 mSv es 13 R / h, en comparación con ~ 1000 R / h en el sitio de Chernobyl el 6 de mayo.Sin embargo, hay que señalar un punto importante aquí. El equipo en serie o semi-serial no se envió al recipiente del reactor o al fondo del contenedor, donde posteriormente se midieron campos de hasta 50,000 r / h. Para tales tareas y otras específicas, como la descontaminación de grandes volúmenes, el reconocimiento bajo el agua, la eliminación de escombros de las piscinas de almacenamiento de combustible gastado, las corporaciones japonesas han liderado desde 2011 el desarrollo de una amplia variedad de mecanismos, muchos de los cuales se encargan solo hoy. Echemos un vistazo a ellos:
 Encuesta corredor y FRIGO-MA
Encuesta corredor y FRIGO-MAComencemos con una versión más compacta de la cinemática de Pakbot: el corredor de encuestas de TOPY. Sin embargo, no es un robot muy interesante, se arrastró hasta los sótanos de los bloques en 2012. Se usó una versión aún más pequeña de este esquema llamada FRIGO-MA, así como un extraño robot de cuatro patas de Toshiba que podría producir un reconocimiento plano por separado, para controlar las fugas de las tuberías de la tubería del reactor (durante bastante tiempo la tarea de encontrar lugares de fugas de agua de refrigeración fue extremadamente importante para los liquidadores).
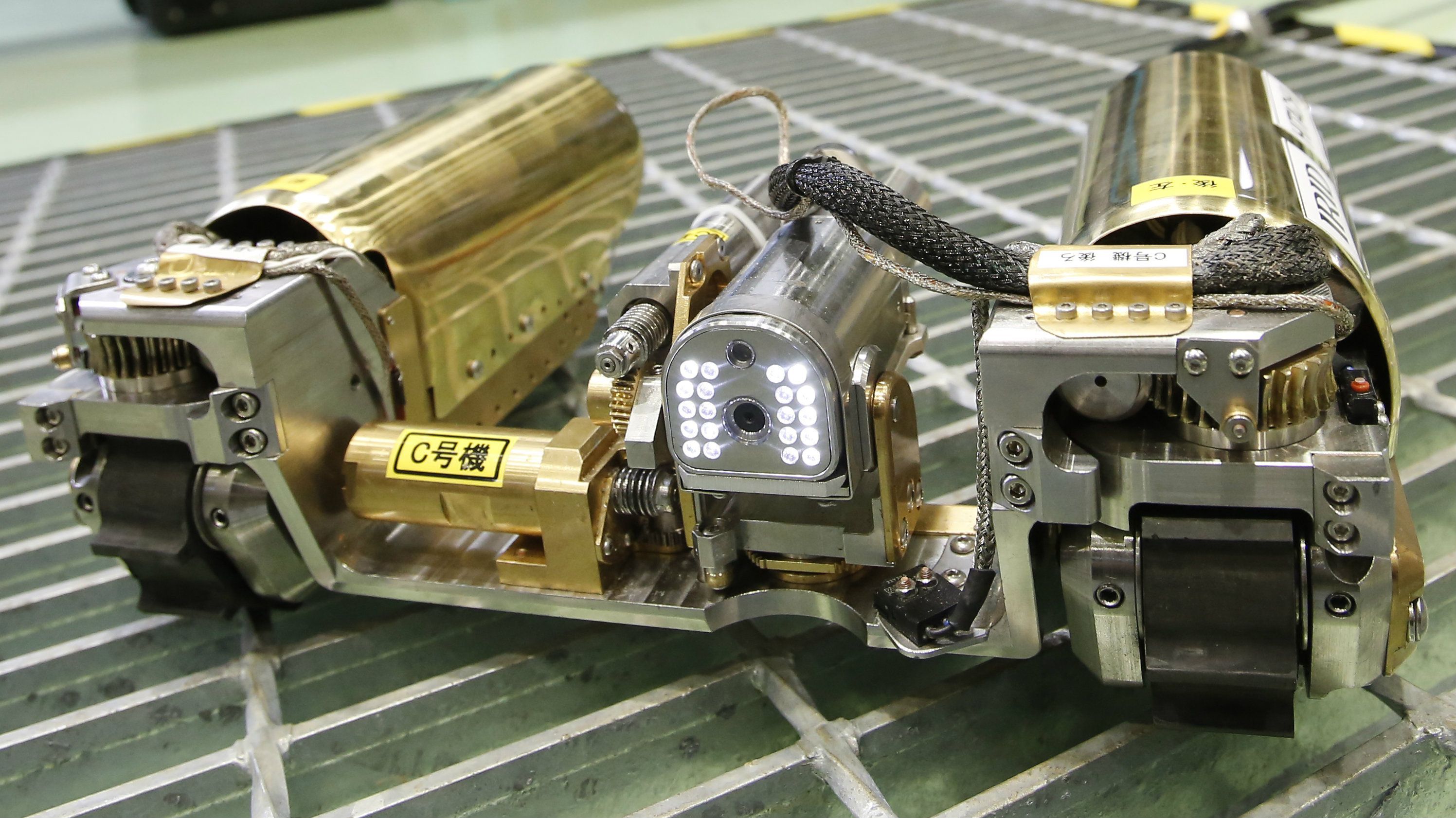
Scorpion, un explorador aún más pequeño y robusto, desarrolló Toshiba, y este robot entró en burbujeadores y reactores de contenedores (y parece que uno de los escorpiones se convirtió en el primer robot en ser replicado por los medios).
Prueba de "Scorpion" en el diseño del bloque de contenido 2. Es interesante que se hayan construido muchos modelos diferentes para enviar robots, que reproducen de manera bastante confiable muchos elementos de los diseños de centrales nucleares.Por cierto, a la cuestión de los pequeños exploradores. Me gustó la foto de este robot: adivina qué se usa como cámara

El rival de Toshiba Scorpion era el cambiador de formas de Hitachi, un diseño bastante impresionante con cinemática interesante. Se enviaron dos robots de esta versión a la parte inferior del contenedor, se realizaron reconocimientos en los campos de ~ 500 r / h (5 Sv / h), y se encontró allí una pulverización de corio.

Fueron ellos quienes se convirtieron en el héroe de las noticias del año pasado "TEPCO envió robots al reactor, y murieron por radiación". De hecho, el primer robot se quedó atascado, pero el segundo realmente se encontró con un pedazo de SNF con un campo de 5000-8000 r / hy la electrónica se negó. (La ironía del destino aquí es que el término "mantenerse consciente" en un automóvil resultó ser muy similar a una persona). Por cierto, a pesar de la muerte, estos robots han descubierto algo bastante importante: en el contenedor contenedor de la unidad 1, el agua está en un nivel bastante alto, lo que significa que está apretada.
Video filmado por uno de estos exploradores.Sin embargo, a diferencia de una persona, los ingenieros tienen la oportunidad, ante un problema, tratar de resolverlo inventando una nueva opción. Ahora Toshiba está probando una versión del mismo pequeño Scorpio Scout, equipado con un microbranch y un microcuchillo para empujar trozos de corium. En general, los autos nuevos se acercan cada vez más al área principal sin explorar: lugares de penetración del recipiente del reactor y el corium del contenedor, y mapean la ubicación del corium debajo del reactor en los bloques 1,2,3.
Por el momento, a partir de métodos no remotos, TEPCO solo ha logrado bajar la cámara resistente a la radiación en el bloque No. 2 al corium y medir el DER a 530 Sv / h (es decir, 53000 r / h). Tal tasa de dosis no nos permite esperar que la tarea de reconocimiento / mapeo sea simple: la electrónica existente, incluso resistente a la radiación, se vuelve demasiado poco confiable en tales condiciones, y es imposible protegerla en un pequeño robot.
Por cierto, en el marco de ITER, una línea de microcircuitos resistentes a la radiación (ADC, DAC, interfaces digitales, lógica) se está desarrollando en Europa para aproximadamente tales condiciones de trabajo. Otro ejemplo de cómo un proyecto "sin valor" trae resultados concretos.
Para finalizar el tema del reconocimiento, debe mencionarse que TEPCO utilizó varios robots submarinos autónomos en serie y un pequeño bote a control remoto para el reconocimiento de sótanos llenos de agua.
La segunda tarea principal para el ejército de robots TEPCO fue y es el análisis de bloqueos, principalmente en el marco de la eliminación de SNF. Como escribí anteriormente, inicialmente la FAEC utilizó productos estándar BROKK y Walischmiller para la industria nuclear y equipos de construcción telecontrolados. Sin embargo, Hitachi desarrolló rápidamente un robot ASTACO-SoRa similar a BROKK (es decir, robot pesado con seguimiento autónomo con potencia autónoma de un motor de combustión interna).
Bajo la apariencia de ASTACO-SoRa, hay algo de las imágenes del anime japonés.Su tarea consistía en desmantelar los restos de cables, un objeto complejo para el desmantelamiento estándar de brazos robóticos, que a menudo se encuentra en las centrales nucleares. Junto con el ASTACO-SoRa especial y los BROKK resistentes a la radiación, se utilizaron los robots desmanteladores Husqvarna DXR-140, DX-250 y DX-310. ¿Cómo no sabías que husqvarna produce destructores?
 Aceptación de Husqvarn en 2012 en la central nuclear de Fukushima.
Aceptación de Husqvarn en 2012 en la central nuclear de Fukushima.¿Por qué necesitabas esos dispositivos? Permítanme recordarles que en el marco del evento principal de hoy, a saber, la extracción de combustible nuclear gastado de las piscinas de almacenamiento, es necesario desmontar los escombros alrededor de las piscinas, construir refugios y, en general, prepararse. Y no en todas partes el entorno de radiación permite que las personas hagan esto, por lo que el abundante cambio de estas tareas para desmantelar robots es comprensible, aunque el ritmo de trabajo está disminuyendo bastante.
 Nuevamente, en esta tarea, junto con todo tipo de robots torpes y lentos, los equipos de construcción telecontrolados funcionan.
Nuevamente, en esta tarea, junto con todo tipo de robots torpes y lentos, los equipos de construcción telecontrolados funcionan.Por cierto, sobre el ritmo, una pequeña digresión. En 1986, los robots se movieron aún más lentamente, fueron aún menos precisos y confiables, y cada día de retraso en el almacenamiento de combustible nuclear gastado desde el techo de la unidad 4 de la central nuclear de Chernobyl condujo a la eliminación adicional de radionucleidos, por el viento y el agua. Es por eso que, tratando de completar las tareas de limpieza con robots, y asegurándose de que sea demasiado lento, los liquidadores del accidente de Chernobyl volvieron a la realización de esta tarea por parte de las personas. La lentitud y la falta de fiabilidad de la robótica se convirtieron en la razón principal de su pequeño uso, y no de la radiación y las "condiciones terribles", como les gusta decir a los desarrolladores de esos robots. Como prueba, les daré un video documental:
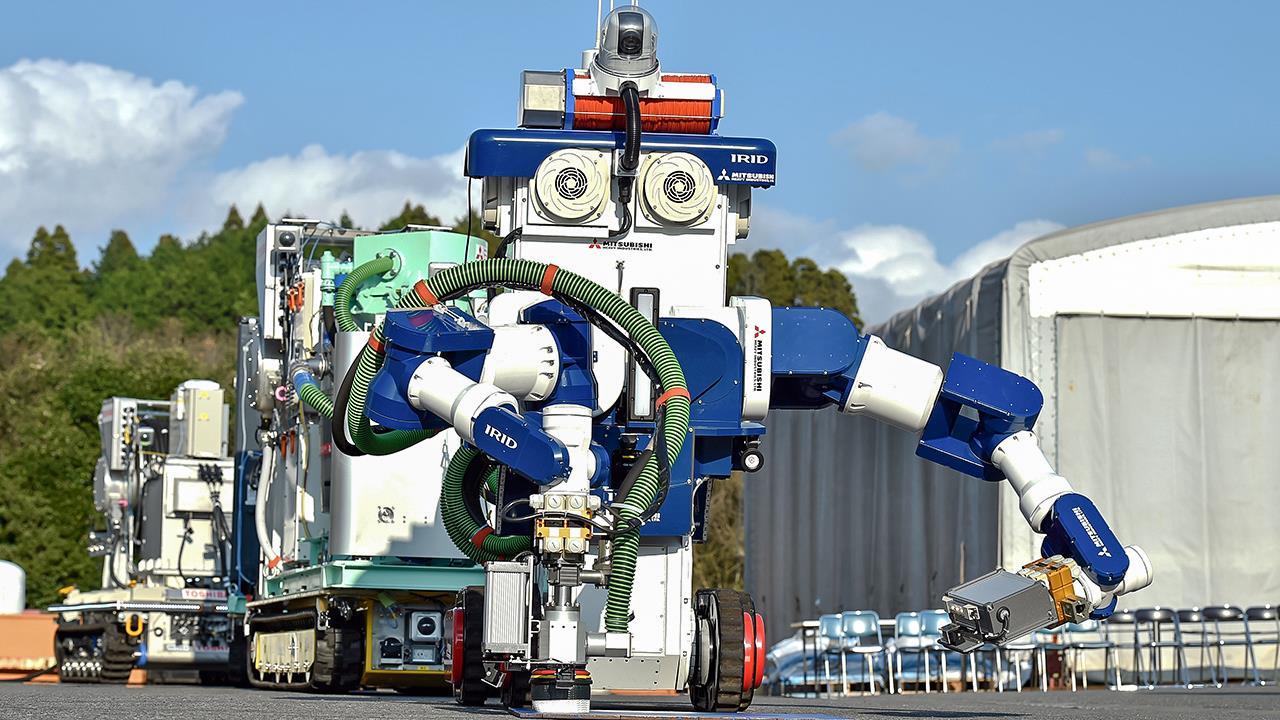
Pero volvamos a Fukushima. Junto con el desmantelamiento de escombros y el envío de desechos radiactivos sólidos a contenedores en bloques contaminados, hubo (y hay) otra tarea desagradable: descontaminación de paredes, pisos, techos, etc., todos los elementos estructurales que no pueden eliminarse simplemente del lugar de trabajo futuro. Los radionucleidos arrojados durante la fase activa del accidente se asentaron en estas superficies, en algún lugar donde se pueden lavar, y en algún lugar donde se debe quitar. Una buena opción es la limpieza con hielo: bombardeo de superficies con partículas de hielo seco (de CO2), seguido de succión en el filtro de todo lo que sucedió. Sin embargo, el sistema en sí mismo para tal limpieza es bastante engorroso: para empezar, intentaron instalarlo en el mismo Husqvarna DXR-140 con un peso de 985 kg, pero el resultado no fue muy bueno. ¡Pero estamos en Japón! Patria de extraños robots! Y el resultado superó todas las expectativas.
El tren robótico consta de cuatro carros, el primero de los cuales está equipado con un manipulador de descontaminación, mientras que el resto lleva un sistema de generación de hielo seco, una aspiradora, filtros, diversos líquidos de limpieza, etc.En general, se crearon alrededor de una docena de mecanismos especializados para la tarea de descontaminación, incluidos el más fácil para limpiar el piso y el más extraño para limpiar el techo. Al mismo tiempo, por lo que puedes entender, los resultados de las pruebas no, pero el trabajo real en los bloques siguen siendo bastante modestos y se parecen más a las mismas pruebas, solo en el mundo real. Incluyendo, el tren megarobo que se muestra arriba aún no se ha lanzado en bloques (parece).
Tecnología de descontaminación: ¿un manipulador montado en el extremo de una escalera retráctil controlada a distancia?
Otro ejemplo de una extraña máquina de descontaminación.
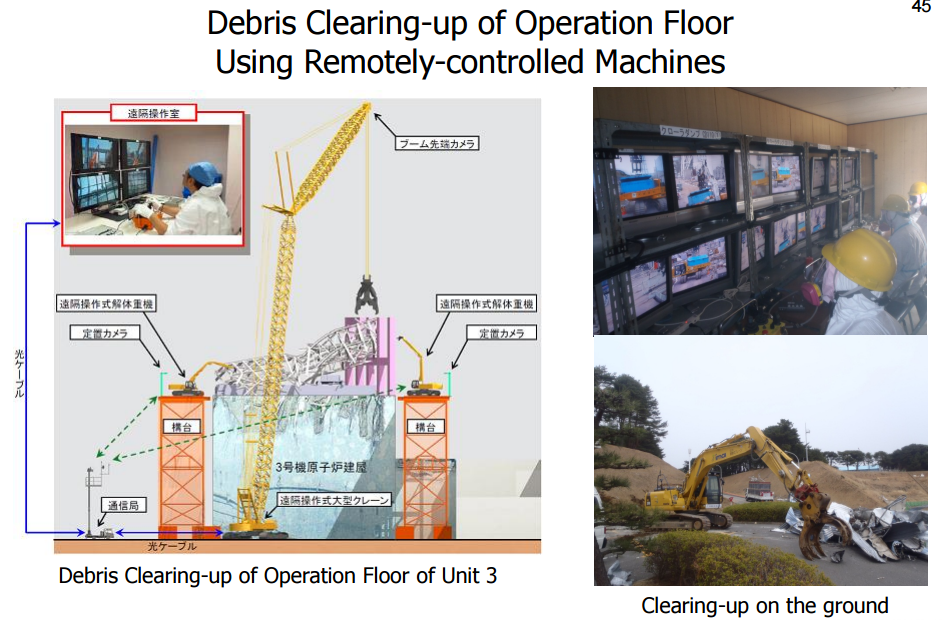
Finalmente, la última tarea más importante para la cual los japoneses están diseñando robots controlados a distancia es limpiar los grupos de exposición. Esta tarea es más difícil porque Aquí, además de las estructuras inestables en aguas turbias, uno tiene que lidiar con grandes campos de radiación (especialmente recoger basura de los estantes con combustible nuclear gastado) y el peligro de brotes de una reacción en cadena; por ejemplo, si deja caer un conjunto de combustible en otro, es muy posible.
Video filmado por un vehículo submarino en el grupo de exposición del tercer bloque. ¡Debajo de esta basura hay varios cientos de toneladas de combustible gastado!Para resolver este problema, se creó un complejo bastante grande a partir de un robot telecontrolado submarino con dos manipuladores suspendidos en una grúa aérea y varios dispositivos de elevación. TEPCO está planeando comenzar a usar este complejo ya en 2017 al limpiar el combustible gastado en la tercera unidad, donde la descarga de SNF debería comenzar en 2018.
Para resumir, me gustaría señalar lo siguiente:
1. La liquidación de las consecuencias del accidente en la central nuclear de Fukushima se ha convertido en un lugar para el uso masivo de equipos telecontrolados, principalmente en tareas de reconocimiento y mapeo.
2. Los robots seriales existentes no pueden hacer frente a las tareas de liquidación en sí (y reconocimiento en lugares difíciles). Durante dos o tres años después del accidente, se desarrollaron muchas variantes de equipos nuevos: está claro que se está buscando formas que sean exitosas y efectivas para trabajar en condiciones de accidentes por radiación en instalaciones industriales. En total, por cierto, conté 43 tipos de automóviles a control remoto que se enmarcaron en los marcos de los informes de TEPCO.
3. El trabajo de las máquinas con control remoto es mucho más lento que con la ayuda de las personas.
Este es un problema bien conocido, y está asociado tanto con la cinemática defectuosa y la movilidad de los robots como con la dificultad de percibir la situación por parte del operador a través de cámaras separadas: hoy están tratando de resolver el segundo problema con la ayuda de la realidad aumentada y virtual, pero esas campanas y silbatos de moda aún no han llegado a la FAES ( pero se usan activamente en el desarrollo en las universidades).PD Por alguna razón que no entiendo, algunos videos no se recogen, si alguien puede aconsejar algo, aconsejar.