
En el artículo, consideramos la parte electrónica del nuevo quadrocopter Geoscan Pioneer, que está diseñado para enseñar robótica. Hablaremos sobre la creación de un helicóptero, o mejor dicho, qué experiencia ganamos y qué cambios hicimos al proyecto. Al final, comparta planes para el futuro.
1. ¿Por qué crear un quadrocopter para entrenamiento en Geoscan?
Para resolver muchos problemas aplicados, se utilizan cada vez más vehículos aéreos no tripulados (UAV), en particular, sistemas de múltiples rotores. Su presencia se puede ver en muchas áreas, por ejemplo, en fotografía aérea, entrega de carga, filmación de video desde el aire, monitoreo de objetos, así como en carreras (carreras de drones).
Sin embargo, en la industria de aviones no tripulados, en rápido desarrollo, hay una escasez de personal profesional. El personal técnico está mejor preparado a partir de la escuela. Solo en el pasado todas las etapas: desde el diseño hasta la operación y la modernización, pueden convertirse en un verdadero profesional en su campo y dar otra ronda en el desarrollo de la industria, tanto en términos de tecnología como en términos de involucrar un número creciente de áreas relacionadas en la industria y resolver un número creciente de problemas aplicados .
Se puede argumentar que el uso del quadrocopter por parte de escolares, estudiantes y aficionados como un robot volador para aprender los conceptos básicos del desarrollo, operación y actualización de UAV es un tema interesante para nosotros. Como consecuencia, esto puede conducir a la creación de una base para un nuevo estándar educativo.
Creemos que los siguientes temas son los más interesantes para estudiar:
Programación de sistemas de control, creación de algoritmos de orientación y navegación en el espacio, reconocimiento del entorno;
Electrónica : conectando sensores y estudiando los principios de su trabajo, estudiando la estructura de los sistemas de aeronaves;
El diseño del marco y la mecánica, así como el estudio de los parámetros electromecánicos del helicóptero para optimizar los modos de vuelo al resolver diferentes problemas;
Control del helicóptero tanto en modo piloto como en modo operador UAV. Es decir, manual o automáticamente.
Por lo tanto, se están formando muchas tareas interesantes que pueden resolverse para la generación más joven en el marco de los círculos educativos, las competiciones y las olimpiadas.
En base a lo anterior y la experiencia existente en la creación de vehículos aéreos no tripulados en Geoscan, decidimos poner en práctica estas ideas mediante la creación de un software y una plataforma electrónica.
Vale la pena señalar que para programar simplemente un robot volador, necesita un sistema de navegación. Y si en la calle este problema se resuelve mediante el uso de navegación por satélite, en el interior este problema no tiene una solución clara. Dado que no siempre es posible trabajar en la calle debido al clima, el terreno circundante o la seguridad, la navegación interior se está convirtiendo en una necesidad. El sistema de navegación que hemos elegido se describirá a continuación.
2. La primera versión de la electrónica del helicóptero "escolar"
Para crear un helicóptero pequeño, es necesario reducir al mínimo la masa y las dimensiones de la electrónica. Para hacer esto, es lógico aplicar una solución de placa única que contenga un piloto automático (AP) con sensores, controladores de motor, comunicaciones de radio, fuentes de alimentación y los conectores necesarios. "Single Board" simplifica la combinación de electrónica con el marco y reduce al mínimo la cantidad de cables.
Los motores sin escobillas se utilizan debido a una serie de ventajas en comparación con los motores sin escobillas. Dichos motores son más eficientes y confiables, y el gran torque de peso relativamente ligero le permite abandonar el uso de una caja de engranajes en el tornillo. Una cierta dificultad es el desarrollo de controladores de velocidad para motores sin escobillas. Pero gracias a la experiencia en el desarrollo de vehículos aéreos no tripulados "adultos", esto no se convirtió en un gran problema. De las desventajas del grupo seleccionado de propulsor-motor, solo se puede observar el costo de los motores y reguladores, pero se justifica por el tiempo de vuelo, las buenas características de velocidad del helicóptero, la capacidad de mover una carga útil más grande y también tener menos de qué preocuparse por comprar y reemplazar motores fallidos.
Por lo tanto, nos acercamos a la creación de una placa prototipo para un pequeño helicóptero. No prestaremos mucha atención a esta placa, pero solo tengamos en cuenta sus principales deficiencias, que no son pocas, principalmente debido al muy modesto tiempo de desarrollo de tres semanas.
En el diseño inicial, quería probar la máxima funcionalidad del helicóptero, por lo que el magnetómetro y el módulo de navegación por satélite se colocaron en el tablero, que resultó no funcionar debido a la compatibilidad electromagnética insuficiente con el tablero. El magnetómetro estaba demasiado cerca de los conductores de energía y cuando la corriente pasó a través del conductor, el magnetómetro proporcionó información incorrecta. Debido al área de pantalla insuficiente de la antena de cerámica, el receptor GPS encontró una cantidad insuficiente de satélites para la navegación.
Para facilitar la conexión de un quadrocopter a una computadora, se utilizó un módem Wi-Fi. El uso de esta interfaz para telemetría y control es problemático si se supone que funciona en un entorno ruidoso, por ejemplo, en exposiciones u otros eventos públicos donde hay muchos dispositivos a 2,4 GHz. Además, el módulo mostró una operación de red inestable.

Desde el punto de vista de la operación, tampoco todo salió bien. En primer lugar, los cables de fase de los motores tenían que soldarse a la placa, ya que no había conectores para ellos. La dificultad radica en la necesidad de tener habilidades con un soldador y la capacidad de mezclar el orden de los cables, lo que conduce a la dirección incorrecta de rotación del motor, y también complica el ensamblaje-desmontaje. En segundo lugar, no fue posible hacer agujeros de montaje convenientes en el tablero, lo que afectó negativamente la confiabilidad y la practicidad de fijar el tablero al marco. En tercer lugar, el conector de interfaz en forma de "pines" estándar con un paso de 2 mm no siempre es conveniente de usar cuando se conectan múltiples dispositivos.
Entre otras cosas, las dimensiones de la placa eran más grandes de lo esperado debido a la instalación unilateral de elementos (con la excepción de un pequeño número de elementos reguladores en la parte inferior).

Sin embargo, el helicóptero resultó ser un trabajador. El piloto automático y los reguladores de firmware se transfirieron desde nuestro
helicóptero "grande" . Después de haber ajustado ligeramente los coeficientes de los bucles de control, hicimos que el helicóptero hiciera un excelente trabajo con su tarea principal: volar. Con 1306 motores de 3100 kV, tornillos de 5 "y una batería LiPo 2s de 1300 mAh, el helicóptero vuela durante 15-16 minutos, y con GoPro3 (80 g), aproximadamente 10 minutos.
Se implementó un vuelo en un sistema de navegación ultrasónico (EE.
UU .) De
Marvelmind . El sistema consta de dos tipos de balizas ultrasónicas: estacionarias y móviles. Al mismo tiempo, la baliza móvil del sistema montado en el helicóptero proporciona 3 coordenadas de posición al piloto automático con una precisión suficientemente baja (± 5-10 cm) y el sistema de control que creamos combina estos datos con los datos del giroscopio y el acelerómetro, y controla la posición espacial del helicóptero.
3. Ideas para crear una nueva versión
Cuando nos acercamos a la nueva versión del tablero, nos resultó obvio que se necesitaban varias mejoras. Pensamos en el concepto del proyecto con más detalle, ya que apareció una visión completa de las áreas y métodos de uso del helicóptero. La idea principal fue la decisión de dejar solo los componentes necesarios en la placa y hacer una especie de "placa base", a la que se conectarán los módulos que especifican el propósito funcional del helicóptero. Un ejemplo de dicho módulo es un receptor de satélite con una brújula para la navegación en la calle.
Ahora la nueva placa contiene el controlador AP principal con sensores: un acelerómetro, un giroscopio y un barómetro. El barómetro es necesario para el modo de retención de altitud, lo que simplifica enormemente el control del helicóptero con control manual. Para almacenar los registros de vuelo y los parámetros del piloto automático, utilizamos un chip de memoria flash separado.
Todos los componentes electrónicos en la placa y los módulos de expansión funcionan con tres convertidores de voltaje: 5 V (para módulos, LED, receptores PPM / SBUS), 3,3 V (para módulos y microcircuitos en la placa) y otros 3,3 V por separado para sensores. El voltaje de entrada es de 6 V a 14 V, que corresponde a una batería de polímero de litio con dos o tres "bancos" (2s-3s).

La comunicación con una PC se realiza a través de un canal de radio o USB. Para reducir el tiempo de desarrollo, utilizamos el módulo de radio
Radiocraft de 868 MHz
listo para usar con una potencia de 25 mW.
El módulo de radio está provisto de una antena de chip en la placa, así como un conector para conectar una antena externa. Sin embargo, para usar el conector de antena externa, debe trabajar con un soldador. Se supone que el usuario del chip tendrá suficientes antenas de chip. Para conectar la PC al helicóptero por radio, debe usar el módem USB recíproco suministrado en el kit.

Los LED WS2812B controlados por RGB actúan como indicadores de varios eventos. Es posible conectar LED adicionales, excepto los de la placa.

Los controladores de velocidad del motor pueden soportar una corriente de 20 A y tienen la capacidad de frenar activamente, lo que afecta positivamente la dinámica de control del helicóptero.
El voltaje de suministro se encuentra dentro de las baterías LiPo 2s-3s. Los reguladores están conectados al AP a través de UART, y no a través de una señal PWM. Esto tiene un buen efecto sobre la inmunidad al ruido. El tamaño de los reguladores se reduce, en comparación con la primera versión, debido a las cajas más compactas de componentes electrónicos. Además, realizamos una instalación bidireccional de componentes, lo que también nos permitió reducir el tamaño de la placa.

Ahora hay orificios de montaje "humanos" en el tablero para un fácil montaje en el marco.
Hay más conectores útiles. Ahora no necesita soldar los cables de los motores a la placa. Los módulos de expansión están conectados a través de dos conectores en la parte superior de la placa, y no puede confundir la posición del módulo debido a la diferente cantidad de pines y el diseño del conector.
Los conectores TE Micro-MaTch están seleccionados para protección contra daños mecánicos. A diferencia de los pasadores de 2,54 mm, no se dañan tan fácilmente si se caen o se manejan mal. También puede conectar módulos a través de un cable de extensión para permitir que el módulo se lleve a cabo, por ejemplo, por el helicóptero. Las siguientes interfaces están conectadas a estos conectores: UART, SPI, I2C, varios GPIO, una señal para conectar LED controlados adicionales y una fuente de alimentación de 3.3 V y 5 V. El nivel lógico de las interfaces es 3.3 V por defecto, pero puede cambiarse a 5 V. si lo desea.
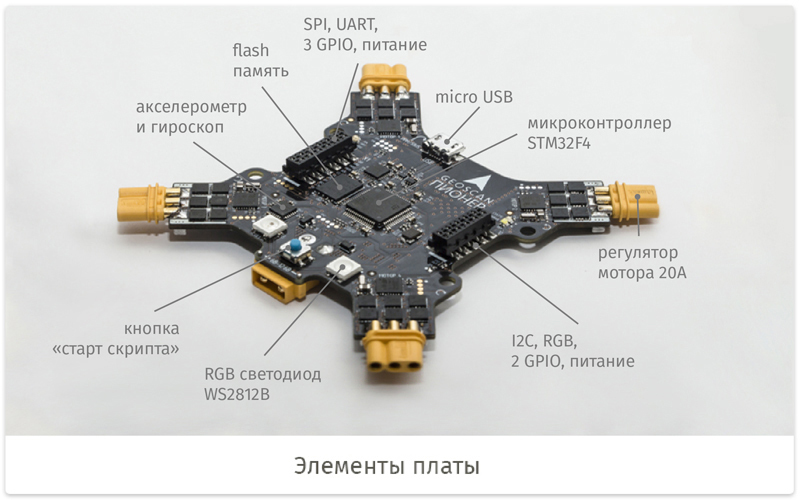
El usuario programa el botón o lo usa de manera predeterminada para ejecutar el script.
Un poco sobre el componente de software de la plataforma. El firmware del microcontrolador del piloto automático STM32F4 está escrito en C ++ y se ejecuta en RTOS
NuttX . El firmware está cerrado, pero el usuario puede escribir su código en el lenguaje de script
Lua .
En general, elegimos entre varios lenguajes de script: Python, JavaScript (
IoT.js ) y Lua. La implementación estándar de Python es difícil de usar en MK, debido a su tamaño demasiado grande. Consideramos la opción con MicroPython, pero no funcionó debido a la posibilidad de acceso directo a las instrucciones del ensamblador. Y no quisiéramos proporcionarles acceso al usuario promedio. JavaScript tiene una funcionalidad redundante y, para eliminar el exceso, debería funcionar. Lua es un lenguaje muy popular, fácilmente extensible usando C ++, y tiene implementaciones adecuadas para nosotros.
El script puede contener algoritmos de control o simplemente una secuencia de acciones, recibir y procesar datos de sensores, gestión de carga útil, etc. En general, se proporciona una amplia gama de funciones de interacción con un robot volador, que se pueden usar para tareas de investigación, competitivas o de aficionados. El script se puede escribir y cargar en el helicóptero usando una aplicación especial, pero también puede generar código usando
Google Blockly .
Puede descargar el script a través de un cable USB o un canal de radio. La aplicación en la PC muestra información de telemetría, que le permite juzgar el estado del helicóptero. Y, por supuesto, hay controles y configuraciones para el robot.
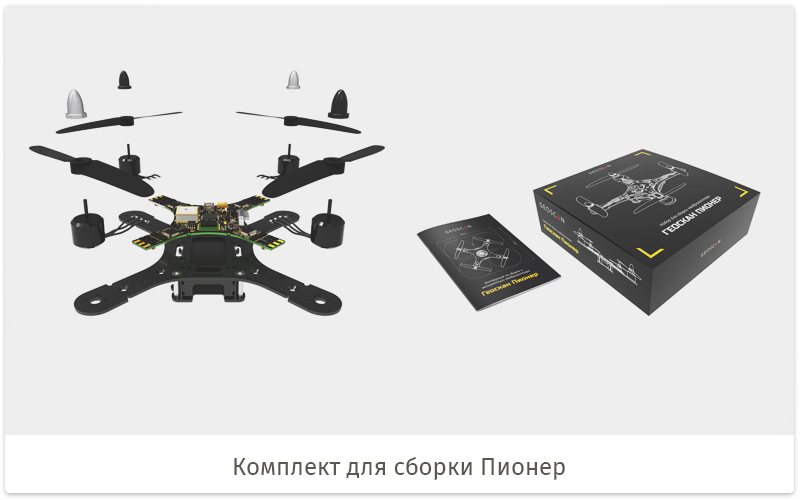
El marco, en este momento, está hecho de fibra de carbono o fibra de vidrio mediante placas de fresado. Se ensambla a partir de una pequeña cantidad de piezas y tiene un compartimiento de batería.
Opcionalmente, puede colocar el chasis y la protección del tornillo. Ahora en el desarrollo de un marco de plástico, que se fabricará con tecnología de inyección.

4. Ampliamos la funcionalidad con módulos
Como se mencionó anteriormente, la placa tiene la capacidad de expandirse utilizando complementos. Los módulos principales son los siguientes:
El módulo de navegación es un receptor para su propio sistema de posicionamiento para ultrasonido interior.
 Módulo GPS
Módulo GPS : posicionamiento satelital en la calle. También tiene un magnetómetro a bordo para la orientación del curso.
 Módulo ToF
Módulo ToF : recibe información de varios sensores de distancia
ToF dirigidos en diferentes direcciones, lo que permite detectar obstáculos.
 Módulo de carga
Módulo de carga : equipado con captura de carga electromagnética y LED para indicación y efectos de iluminación.
 El módulo Marvelmind
El módulo Marvelmind es un adaptador para el sistema de posicionamiento Marvelmind.
 El módulo OpenMV
El módulo OpenMV es un adaptador para la cámara para visión por computadora
OpenMV .
Módulo de sonda : proporciona la capacidad de obtener altura utilizando un sensor ultrasónico.
Módulo WiFi : agrega una interfaz WiFi.
Módulo Bluetooth : agrega una interfaz Bluetooth.
Por supuesto, son posibles muchos otros módulos que planeamos crear en el futuro.
5. Aplicación práctica y planes futuros.
Video promocional Geoscan PioneerHicimos varias entregas del Pioneer a varias instituciones educativas. Se hicieron sobre la base de la primera versión del tablero, por lo que las entregas fueron de naturaleza más experimental. Sin embargo, el helicóptero era bastante adecuado como diseñador de ensamblaje y para enseñar habilidades de pilotaje.
Concursos de pilotos se llevaron a cabo con la participación de pioneros en Alferievo durante la conferencia
Aeronet 2016 .
Cómo el robot volador Pioneer llamó la atención en el festival de robótica
Robofiniste . Hay una prueba con un vuelo de ocho, que, de hecho, el helicóptero hizo frente con éxito. El sistema funcionó sobre la base de la navegación por ultrasonido.

Se hizo una plataforma con un espacio seguro en forma de marco con una cuadrícula, donde todos los visitantes del festival tuvieron la oportunidad de controlar el helicóptero. Al mismo tiempo, el sistema de control no permitió sacar el helicóptero de la zona permitida.
Hoy estamos trabajando en la producción de los primeros lotes de Pioneros, estamos desarrollando nuevos módulos de expansión, estamos diseñando un marco de plástico para moldear y estamos completando la creación de nuestro sistema de navegación por ultrasonidos. También se planea una presentación de nuestro Pioneer. Puede averiguar sobre el lugar y la hora en el sitio web de Geoscan.