 El campo magnético gira los tornillos individuales que controlan el movimiento de los brazos, las piernas y la cabeza del juguete a través de las cuerdas.
El campo magnético gira los tornillos individuales que controlan el movimiento de los brazos, las piernas y la cabeza del juguete a través de las cuerdas.Hay dos formas de controlar el robot de forma remota. O tratas de equiparlo con un sistema de propulsión autónomo y un sistema de navegación (muy difícil), o haces un robot muy pequeño que se mueve en un campo magnético. El robot está controlado por grandes imanes externos. El control remoto de tales dispositivos es especialmente solicitado en medicina, especialmente porque los dispositivos con un tamaño de incluso
unos pocos micrómetros están sujetos a un control magnético. Ya se han completado los experimentos con la
colocación remota de
catéteres en el corazón y el control de una
sonda de video en el tracto gastrointestinal . El enorme potencial de las micromáquinas para administrar medicamentos a órganos humanos específicos.
Sin embargo, muchas aplicaciones prometedoras de control magnético requieren el trabajo coordinado de no uno, sino de muchos microrobots simultáneamente. Hasta ahora, los científicos solo podían lograr el movimiento simultáneo de robots idénticos en un campo homogéneo, pero no participantes arbitrarios en el enjambre. Sí, hubo una serie de experimentos sobre el control individual de robots desde un enjambre. Pero en todos los casos, estos robots deben diferir entre sí en propiedades magnéticas o en diseño. Es por eso que el
trabajo científico de los físicos del laboratorio de investigación de Philips GmbH Innovative Technologies es muy interesante. Aprendieron a torcer el campo magnético en lugares arbitrarios, y realizaron con éxito experimentos para apretar y aflojar tornillos individuales ubicados uno al lado del otro.
A primera vista, no está claro cómo la torsión de tornillos arbitrarios está asociada con el control de un enjambre de robots en el cuerpo humano. Sin embargo, si lo piensa, estas tareas están muy cerca. Después de todo, controlar el campo magnético con tanta precisión le permite crear una tracción magnética en áreas específicas del cuerpo humano, exactamente donde se encuentra el dispositivo magnético, que debe ponerse en movimiento.
Apretar tornillos individuales con un campo magnéticoPrincipio de funcionamiento
La siguiente ilustración muestra un aplicador de campo con un diámetro de agujero de 12 cm. Consta de tres pares de bobinas de cobre montadas a lo largo de tres ejes espaciales y núcleos cilíndricos de hierro para fortalecer el campo a lo largo del eje z. El diseño es algo similar en principio a un dispositivo de imagen de partículas magnéticas (MPI), pero aquí se plantea la tarea opuesta: no detectar la ubicación de partículas magnéticas con alta precisión, sino controlar estos objetos con la misma alta precisión.

Si una corriente de la misma amplitud fluye a lo largo de dos bobinas, entonces surge un campo espacialmente uniforme a lo largo de los ejes, como en los
anillos de Helmholtz . La combinación de tres pares de bobinas le permite generar campos dinámicos uniformes de orientación arbitraria. Si las corrientes de la misma amplitud fluyen en direcciones opuestas, entonces un par de bobinas funciona como una
bobina de Maxwell , formando un campo de gradiente (en la ilustración en la parte superior derecha y en la ilustración a continuación).
 Configuración de bobina ideal de Maxwell
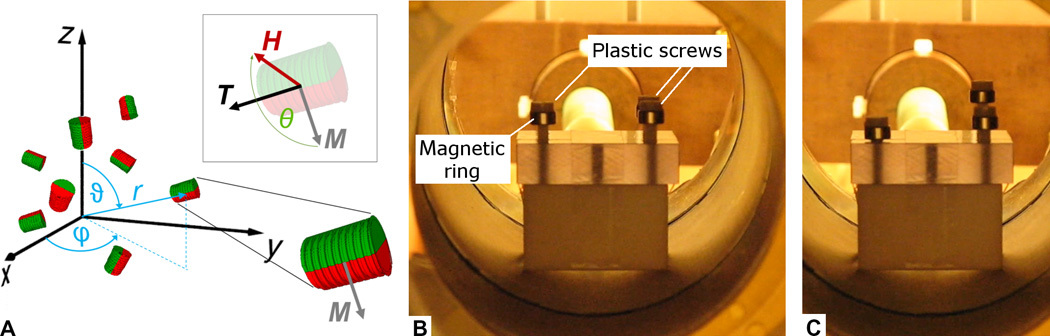
Configuración de bobina ideal de MaxwellAl realizar un experimento conceptual, los científicos demostraron que pueden apretar los tornillos ubicados literalmente en lugares arbitrarios dentro del generador de campo.
La ilustración muestra cómo se calcula la dirección del vector de magnetización y se genera el par. La física le permite apretar / desenroscar todos los tornillos al mismo tiempo o cada tornillo individualmente.
Los científicos creen que el dispositivo desarrollado ya puede usarse en medicina. Por ejemplo, para apretar y aflojar los tornillos que se colocan dentro de las cápsulas o implantes que se fijan firmemente a los tejidos circundantes del cuerpo humano. Si la cápsula está bloqueada, no girará con el tornillo. Además, la fuerza de fijación de la cápsula puede ser tan alta que le permitirá atornillar tornillos o tornillos directamente en los tejidos del cuerpo humano. Por ejemplo, en el hueso.
Quizás girar el dispositivo con un campo magnético puede ser aplicable para el movimiento de microrobots en fluidos corporales. En este caso, los médicos recibirán un control selectivo muy necesario de un enjambre de microrobots en el cuerpo humano.
Además, las máquinas más complejas del cuerpo humano pueden controlarse girando los tornillos de control individuales, como se muestra en el KDPV usando el juguete Lego como ejemplo (ilustración de un artículo científico). Pueden ser algunos implantes complejos dentro del cuerpo. Quizás en ortopedia, la forma de los implantes se ajustará sin la necesidad de usar motores o instalar baterías dentro del dispositivo. Los científicos sugieren el uso práctico de la rotación remota de los tornillos en dispositivos para alargar las extremidades, para controlar las microbombas, para la liberación remota de medicamentos y para la introducción precisa de
103 granos radiactivos de tipo Pd en tumores cancerosos (radioterapia de contacto).
El artículo científico fue
publicado el 15 de febrero de 2017 en la revista
Science Robotics (doi: 10.1126 / scirobotics.aal2845).