Hace algún tiempo, tropezando en Internet con artículos y videos sobre helicópteros, pensé que era difícil y no accesible para todos. Pero el deseo de convertirse en guía de vuelo fue grande, y después de estudiar la gran cantidad de material sobre este tema, concluyó por sí mismo que no era necesario comprar una versión terminada para construir un quadrocopter, es decir, construir desde cero y él mismo. Ahora quiero compartir con ustedes mi experiencia en la construcción de un quadrocopter en MultiWii SE v2.5. En el artículo intentaré describir en detalle todo el proceso de construcción de un quadrocopter desde cero hasta el primer vuelo hasta un principiante absoluto en este tema, que él mismo fue hace algún tiempo.
Una pequeña teoría sobre el vuelo en quadcopter
Montaremos el helicóptero en el marco clásico de la forma "X". Administrar un helicóptero no es tan fácil como podría parecer a primera vista, no tiene parte delantera y trasera como en los autos controlados por radio. Con el comando "adelante", el quadrocopter no vuela hacia donde mira el piloto, sino hacia donde apunta la nariz del quadrocopter (hay una
flecha correspondiente en el controlador de vuelo), esto es un gran peligro para los principiantes, porque desde el suelo puede ser difícil determinar dónde está la nariz del helicóptero, por lo que al construirlo debe marcarlo de alguna manera, por ejemplo, con rayos de un color diferente o colocando LED. Controlar el helicóptero, es decir Para determinar y establecer su orientación en el espacio, vamos a inclinar, rodar y guiñar ángulos + subir. El vuelo del helicóptero en la dirección necesaria se logra cambiando estos tres ángulos. Por ejemplo, para volar hacia adelante, el helicóptero debe doblar la nariz hacia el suelo (cabeceo).
Acelerador - gas, subir
Aileron - roll, aileron (roll)
Ascensor - ascensor, terreno de juego (terreno de juego)
Timón - timón, guiñada (guiñada)
Motores:
LFW - frontal izquierdo, rotación en sentido horario
RFC - frontal derecho, rotación en sentido antihorario
LBC - trasero izquierdo, rotación en sentido antihorario
RBW - trasero derecho, rotación en sentido horario

Componentes necesarios:
Controlador de vuelo CRIUS MultiWii SE v2.5
Programador FTDI
Frame HJ450
Motores 2212-1000KV - 4 piezas.
Controladores de velocidad ESC 30A - 4 piezas
Batería 11.1V 2200Mah 3S 40C Li-Po ( ejemplo )
Cargador de batería B3 AC 2S-3S 7.4V 11.1V Li-Po Battery Balancer
Cable de batería T-Plug
Abrazaderas de plástico
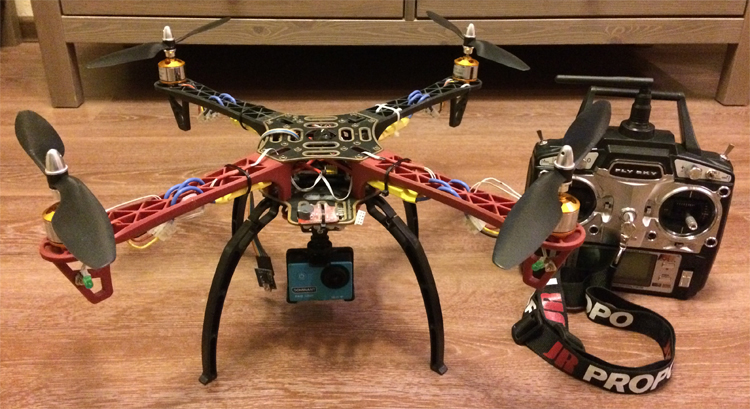
Equipo de control FlySky FS-T6 2.4G 6CH completo con receptor
Hélices 1045 (10x4.5) CW / CCW - 2 piezas Rotación en sentido horario + 2 piezas. rotación en sentido antihorario; tomar más hélices, porque mientras aprenden a controlar un helicóptero, cuando se caen, se romperán una vez
Opcionalmente:
Patas de aterrizaje
Probador de batería Li-Po Indicador de voltaje de batería Probador de bajo voltaje (indicará cuando la batería está descargada)
Esquema de montaje:

Antes del ensamblaje, es necesario calibrar los controladores ESC, el proceso es el siguiente: conectamos el motor al regulador, conectamos el regulador al canal de gas en el receptor (CH3) y a la batería, levantamos la barra de gas en el equipo de control hasta el tope, enciende la aplicación - se produce un sonido característico, bajamos la barra de gas todo el camino: se emite un sonido característico, luego probamos: suba / baje la barra de gas - verifique la operación, apague la aplicación - el regulador está calibrado; usando esta analogía, calibre todos los ESC (
video adecuado para mayor claridad).
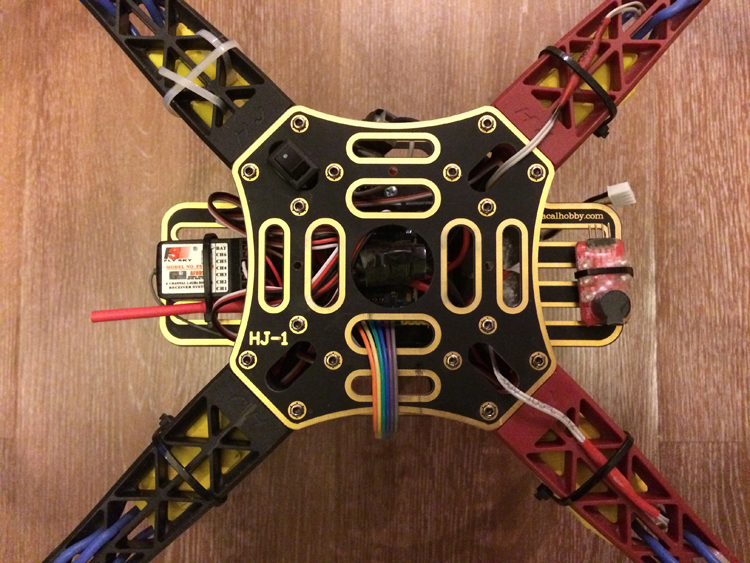
Ensamblamos el marco, instalamos el MultiWii, montamos los motores, conectamos los controladores ESC: a los motores, al MultiWii y al acumulador (conectamos los "más" y "menos" de los reguladores y los conectamos a las baterías "+" y "-", respectivamente). Atención, para cambiar la dirección de rotación del motor, solo necesita intercambiar dos cables de los tres que vienen del motor al ESC. Es deseable instalar MultiWii en el marco a través de la plataforma (lo hice
yo mismo , pero puede comprarlo) para evitar cortocircuitos en la carcasa y para la precisión de los datos; También hice una pequeña "granja colectiva" para el barómetro: la cerré con goma espuma para reducir el error en los datos.
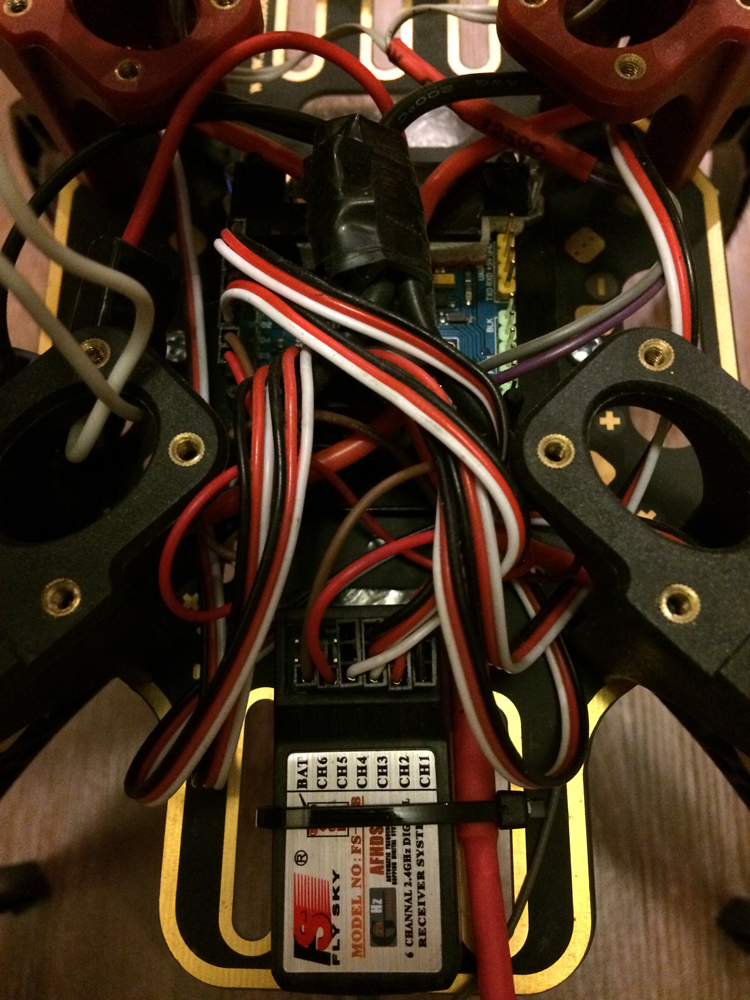
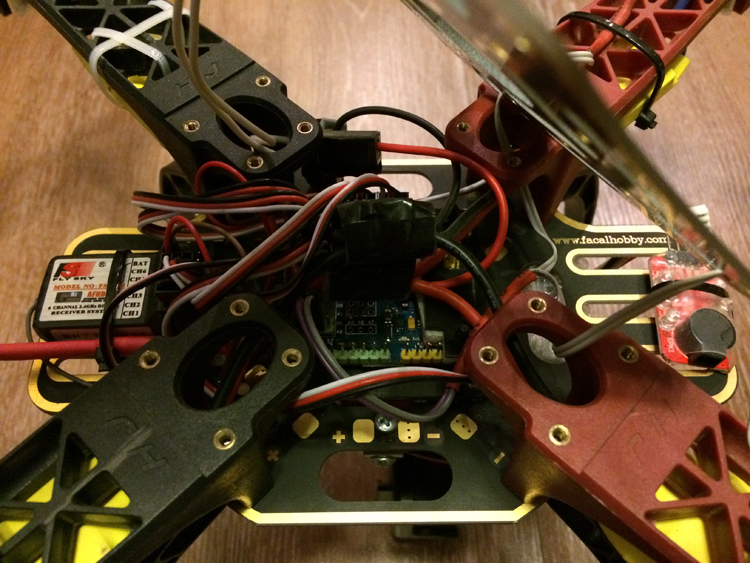
Los canales adicionales CH5 y CH6 se pueden usar para habilitar funciones: mantenga la altura, regrese a casa, controle el cardán de la cámara, etc., puede leer más en este
artículo . Mis diodos están conectados a "+" y "-" en A2. El programador FTDI está conectado al conector FTDI correspondiente en la placa.






Después de haber ensamblado y conectado todo, debe completar el firmware en MultiWii, debe hacerlo a través del programa Arduino IDE (puede descargar la versión actual
aquí ). Conectamos MultiWii a la PC a través del programador FTDI, iniciamos el IDE de Arduino, seleccionamos el puerto COM al que está conectada la placa en el menú, también seleccionamos el tipo de placa en el menú, abrimos el firmware (enlace al final del artículo), abrimos el archivo MultiWii.ino, verán más arriba varias pestañas, solo nos interesará config.h, en él debemos configurar el firmware, dependiendo de la configuración necesaria, debe descomentar (eliminar "//") una de las líneas en la sección deseada (enlace al archivo config.h con mi configuración al final artículo), después de la configuración, complete el firmware en MultiWii.
Ahora necesitamos continuar configurando el helicóptero a través de la GUI, para esto utilizaremos el programa MultiWiiConf (enlace al final del artículo). Conectamos MultiWii a la PC a través del programador FTDI, iniciamos MultiWiiConf, seleccionamos el puerto COM al que está conectada la placa en el menú, presionamos el botón INICIO (los valores deben aparecer en el gráfico), antes de editar los parámetros - presione LEER, para guardar los parámetros - presione ESCRIBIR. Después de seleccionar el puerto y presionar INICIO (ve que el gráfico ha cobrado vida, los datos están llegando), necesita calibrar los sensores: para calibrar el acelerómetro, establecer el helicóptero paralelo al horizonte y presionar el botón CALIB_ACC, la GUI se congelará por un tiempo, luego asegúrese de que los ejes ROLL y PITCH estén paralelos ; para calibrar el magnetómetro (brújula): presione el botón CALIB_MAG y gire el helicóptero en todos los ejes o, alternativamente, coloque el helicóptero en las costillas durante 30 segundos. Además, después de conectar con éxito el programa configurador a su helicóptero, en la parte superior derecha verá barras azules que muestran los canales de su control remoto, mueva las palancas para asegurarse de que todo funcione correctamente. La palanca en la posición mínima debe mostrar un valor de 1000, en el centro de 1500 y en un máximo de 2000; Si no es así, recorte el control remoto de acuerdo con las instrucciones (enlace al final del artículo). Recuerde que las tiras deben moverse de acuerdo con los movimientos de los palos, es decir Si levanta el acelerador, entonces la tira debe subir (de manera similar para otros canales), si no es así, invierta los canales de su control remoto. También en la GUI, puede configurar las funciones para agregar. canales, como la retención de altura (BARO). ¡La función de alineación horizontal (NIVEL) siempre debe estar habilitada! Aquí hay un
video adecuado para ilustrar el funcionamiento del programa MultiWiiConf.
Algunas digresiones sobre el tema
No espere que la función sostenga la altura (BARO) del desplazamiento constante en un punto, ya que para esto se usa un barómetro: el helicóptero seguramente intentará mantener la altitud a la que activó la función, pero nadará dentro de un radio de ± un par de metros, solo por la precisión de los datos del barómetro y para protegerlo de las influencias externas, hice una "granja colectiva" con espuma de goma. Recuerde, la retención de altitud debe activarse en el gas flotante, es decir luego, cuando use la barra de gas para asegurarse de que el helicóptero ± se mantenga a la misma altura y no es aconsejable tocar el gas después de activar la función. Para un vuelo estacionario más preciso en un punto, es mejor usar el módulo GPS opcional.
La función de retención del curso (MAG) es muy caprichosa y su uso para mí terminó de manera deplorable, después de la activación y el despegue, el helicóptero comenzó a girar como un trompo y rápidamente se alejó de mí, los intentos de determinar la nariz del helicóptero y devolverlo al curso no tuvieron éxito, no tuve otra opción cómo arrojar gas y correr hacia un punto que cae del cielo. Aquí hay un breve
video y una
foto después de la caída. Tal vez este comportamiento fue causado por una brújula calibrada incorrectamente o interferencia magnética, o algo más; en general, lea la información en Internet antes de usar y tenga cuidado.
Para el futuro, puede ser útil no llevar una computadora portátil con el programa MultiWiiConf en los vuelos: puede conectar el módulo Bluetooth HC-05 al controlador MultiWii (se conecta al conector UART) y a través de aplicaciones de Android (
Configuración MultiWii y
Estación Terrestre EZ-GUI ) a través de Bluetooth se conecta al helicóptero y realiza las configuraciones necesarias, similares a las de MultiWiiConf.
El procedimiento para arrancar los motores es el siguiente: encienda el helicóptero (chirriante), encienda la aplicación, tome la palanca de gas de la posición inferior a la derecha: los motores arrancan (alimentan) y gire en ralentí, ahora para despegar agregue gas suavemente; Para detener los motores, lleve el acelerador desde la posición inferior hacia la izquierda: los motores se han detenido, apague el helicóptero y apague la aplicación.
Eso es todo, espero que mi artículo te sea útil, pero ahora puedes instalar hélices y reenviar, en nuestro caso, arriba, buena suerte y menos caídas.
Un video corto de mis vuelos
Enlaces de descarga:
Archivo : firmware MultiWii + programa MultiWiiConf
Archivo config.h con mi configuración
Manual para FlySky FS-T6
PD: continúa aquí:
"Instalación de FPV y telemetría en un quadrocopter"