El propósito principal del módulo es controlar
motores sin escobillas sincrónicos (BLDC, BLAC, PMSM ...) con una
forma de voltaje
trapezoidal o
sinusoidal ,
con sensores de posición de velocidad o
sin sensores . Además, el módulo tiene pequeñas dimensiones, un rango bastante amplio de voltajes de suministro, una variedad de canales de depuración, comunicaciones por cable e inalámbricas.
La potencia de los motores controlados por el módulo puede estar dentro de unos pocos cientos de vatios y un voltaje de hasta 30V. Estos son motores de varios mecanismos y dispositivos, tales como: impresoras 3D, puertas automáticas, persianas automáticas, bombas independientes, ventiladores, cerraduras, herramientas eléctricas, estabilizadores, motores y servomecanismos de modelos RC, robots, etc.
Pero esto no se limita al uso del módulo. Se puede usar con pequeñas adiciones para controlar solenoides, motores paso a paso, controlar la iluminación, como un potente cargador, como un regulador de voltaje, como una potente fuente de señales de audio, como un interruptor de alto amperaje con un medidor de corriente, y simplemente como una plataforma de depuración.
En una palabra, dicho módulo en el hogar de un ingeniero puede ser muy útil.
Todas estas propiedades del módulo se obtienen gracias al clásico circuito de medio puente trifásico con sensores de corriente y voltaje y un potente microcontrolador.
(Click para ampliar)Para acelerar el proceso de desarrollo del circuito de la unidad de potencia, se tomó como base uno de los diseños estándar propuestos por TI.
Me decidí por el diseño de la
placa TIDA-00901 .
(Click para ampliar)La placa tiene buenas características: corriente de hasta 20 A, potencia del motor de hasta 200 W, voltaje nominal de 12 V. Diseñado para funcionar en un automóvil.
Como controlador de las teclas de encendido, se
utiliza el chip
DRV8305 . Algunas búsquedas han llevado a la conclusión de que este es uno de los mejores chips controladores para tales aplicaciones.
Un documento de desarrollo muy útil es el
diseño de referencia de accionamiento del motor BLDC de 12 V 200 W (20 A) para automóviles .
La placa tiene una forma redonda específica, el controlador C2000 LaunchPad se utiliza como elemento de control. Desafortunadamente, el software no está completamente abierto con respecto a las bibliotecas de control de motores. C2000 LaunchPad se basa en la familia de procesadores DSP F2802x Piccolo. Esta familia de procesadores está especializada para el desarrollo de convertidores de energía simples, y no difiere en gran universalidad y recursos.
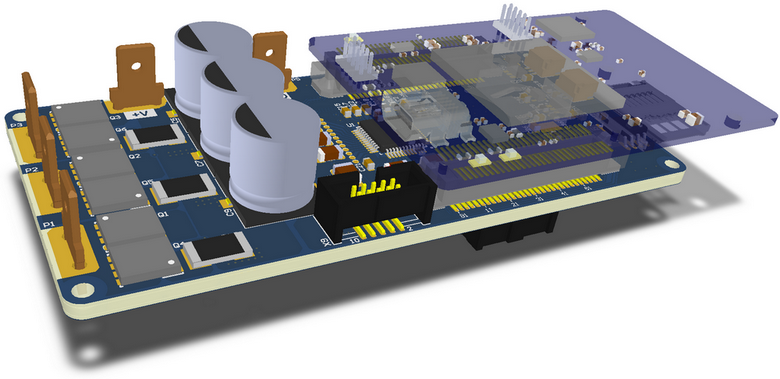
Módulo de arquitectura.
En este proyecto, se decidió ejecutar el módulo en forma de una estructura compuesta de 2 tableros. La placa principal contiene un controlador de alimentación, un subsistema de alimentación y algunas funciones periféricas. La placa del procesador está instalada en la placa principal. Como procesador seleccionado
Placa del proyecto
K66BLEZ1 (más artículos sobre este proyecto:
1 ,
2 ,
3 ,
4 ) con un
microcontrolador de la familia
Kinetis NXP basado en el
núcleo ARM Cortex-M4 . (
180 MHz, 2 MB de memoria Flash, 256 KB RAM + tarjeta micro SD, reloj en tiempo real autoalimentado, dispositivo USB / host de alta velocidad, chip Bluetooth LE 4 / ZigBee separado )
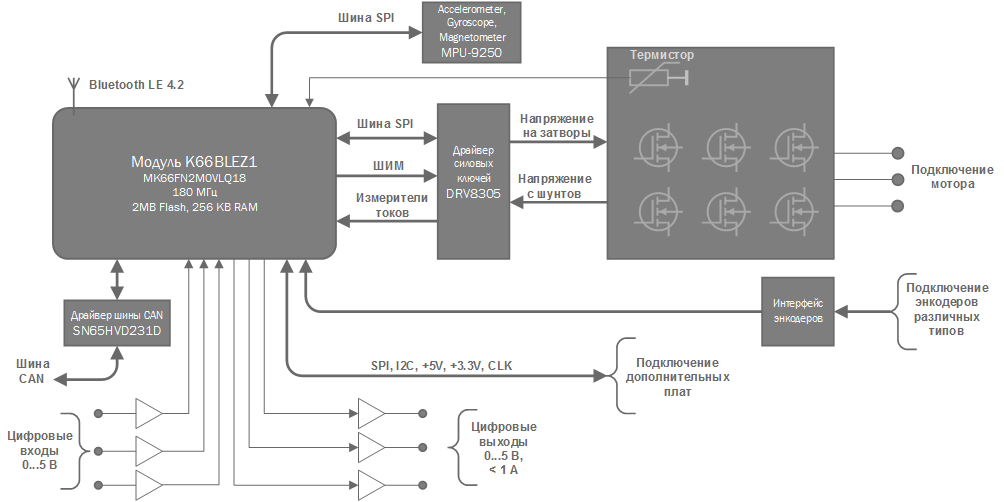
(Click para ampliar)El módulo se alimenta en el rango de voltaje
de 8,5 a 30 V. Varios sensores de temperatura: en el microcontrolador, cerca de los interruptores de alimentación y uno externo protegen el módulo y el motor del sobrecalentamiento peligroso. La base elemental completa se selecciona para operar a
temperaturas de hasta -40 grados. SLas teclas de encendido para controlar el motor están diseñadas para
una corriente de pulso de hasta 200 A. La medición de corriente se realiza mediante derivaciones resistivas con una resistencia de 0.001 ohmios. Gracias a los amplificadores ajustables integrados en el chip controlador DRV8305, el módulo es capaz de
medir corrientes de 300 A a 0.1 A.El bus CAN permite integrar muchos de estos módulos en una red sincronizada común.
El chip
MPU-9250 es útil si necesita controlar la orientación del módulo en el espacio y la navegación inercial, así como para controlar las vibraciones y los golpes.
Un convertidor con un voltaje de salida de 5 V integrado en el módulo DC-DC está diseñado para
corrientes de hasta 3.5 A. El módulo mismo consume de este convertidor no más de 150 mA, el resto del suministro de corriente se puede dar a una carga externa desde el conector X4. El conector X4 es conveniente para conectar elementos de iluminación e indicación, como tiras de LED RGB basadas en chips
WS2812B y similares. El procesador admite la formación de hardware de bits de protocolo de codificación digital en el formato
WS2812B , así como la codificación PPM, PCM, PWM. Del mismo modo, el módulo puede recibir señales PPM y PCM sin dificultad con una carga mínima del procesador.
Cálculo de la frecuencia de conmutación máxima y la justificación de la selección de transistores de potencia.
Verificamos la tabla de comparación de transistores propuesta en el
documento de TI . Todos los parámetros se reescriben de las hojas de datos.
(Click para ampliar)Aquí, como los especialistas de TI, elegí el CSD1854Q5B. En términos de corriente máxima, esta es la mejor opción. Y la frecuencia de conmutación de 122 KHz va mucho más allá del límite razonable que se puede lograr con el control de la familia Kinetis.
Cálculo de la ondulación de corriente máxima y justificación de la selección de condensadores de filtro.
Las ondas actuales afectan directamente la calefacción y la vida útil de los condensadores, especialmente los electrolíticos. Por lo tanto, es necesario seleccionar condensadores por tipo y clasificación, teniendo en cuenta la vida útil estimada y las corrientes máximas.
Con esta fórmula, debe verificar si el módulo puede controlar este motor sin exceder las corrientes máximas del condensador.
Como calcularon los expertos de TI, con los condensadores indicados en el diagrama, un módulo a una frecuencia PWM de 40 KHz puede suministrar durante mucho tiempo un motor bloqueado con una corriente a través de los devanados de más de 80 A.
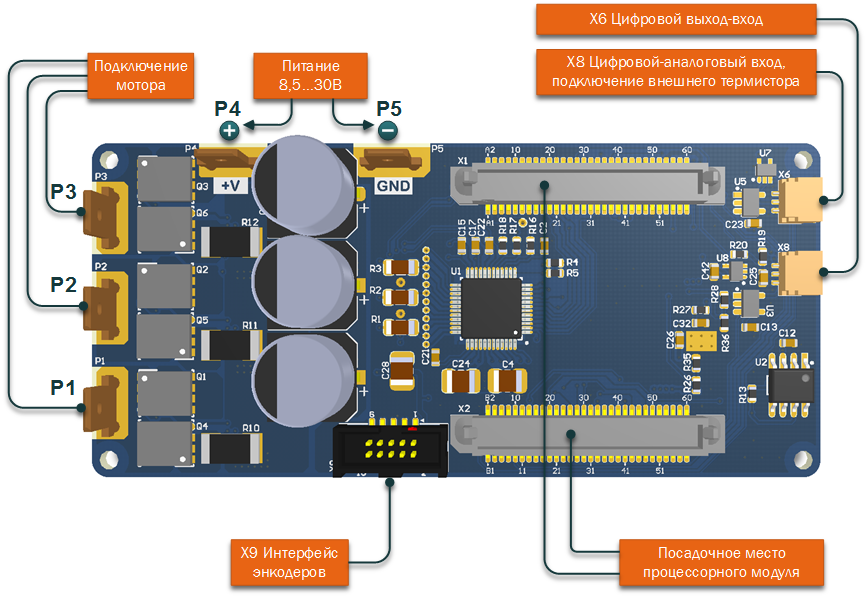
Diagrama de la placa principal del módulo
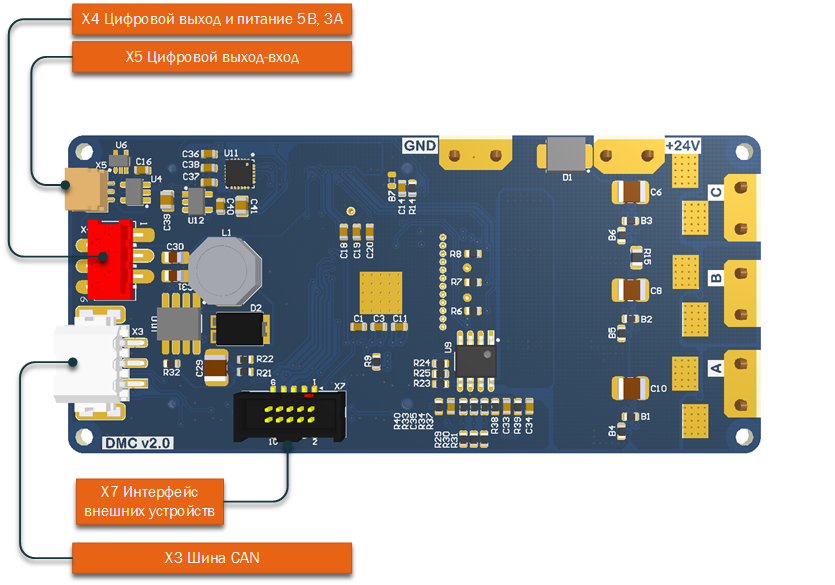
(Click para ampliar)(Click para ampliar)Ubicación del conector
Vista superior del tablero principal:
(Click para ampliar)Vista del tablero principal desde abajo
(Click para ampliar)Dimensiones
(Click para ampliar)Repositorio de proyectos
Todos los materiales relacionados con el proyecto
se almacenan aquí .
El circuito y la placa de circuito se desarrollan en Altium Designer 17.0.6.
En el repositorio, puede encontrar el
modelo de ensamblaje
3D en formato STEP.
También hay
un archivo de cálculo para el convertidor DC-DC en el A8586 en el formato Mathcad.
La parte del programa del proyecto se considerará en el próximo artículo.