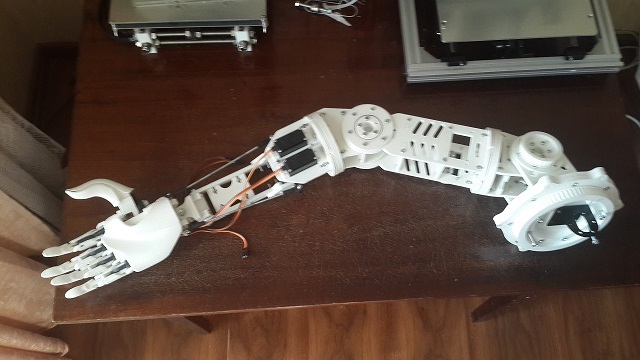
Hoy queremos hablar sobre el dispositivo del robot manipulador promocional Oscar. Aunque inicialmente no se hicieron requisitos industriales estrictos para el manipulador, nuestro objetivo era hacer una solución práctica y estética, aunque no muy costosa y relativamente simple de hacer en casa.
La longitud del manipulador desde el hombro hasta la punta de los dedos es de 0.6 metros, peso - 2.25 kg. Materiales de fabricación - PLA. El manipulador se puede dividir condicionalmente en 3 componentes:
- Cepillo biónico
- Muñeca (2 grados de libertad)
- Articulaciones de codo y hombro (5 grados de libertad)
Esto se debe al hecho de que cada uno de los componentes tiene su propia solución técnica.
Cepillo biónico
Para un inicio rápido y fácil, se decidió tomar como base el proyecto Hackberry de código abierto. El diseño del pincel se modificó ligeramente para adaptarse a sus necesidades.
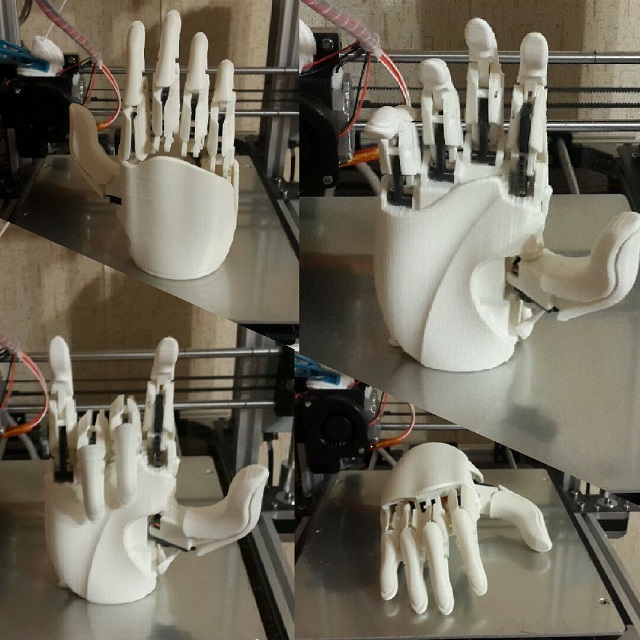
Las unidades de control de dedo se encuentran en el propio cepillo. Hay tres de ellos. Uno en el pulgar, uno en el dedo índice y uno en el resto.
Con la ayuda de un agarre tan inteligente, el robot puede tomar algún objeto voluminoso, por ejemplo, una botella de agua mineral, así como darle la mano a una persona o agarrar un objeto más pequeño / delgado, sosteniéndolo entre el pulgar y el índice.
Muñeca
La muñeca tiene un accionamiento diferencial y está controlada por un par de barras. Un extremo de la barra está unido a la base del cepillo, el otro a la palanca del servo. Así, se obtienen 2 grados de libertad.
Para una mayor estética, los modelos maestros para el cuerpo del antebrazo se diseñaron e imprimieron en una impresora 3D.

Y el caso fue hecho por moldeo al vacío. El resultado es una mano antropomórfica.

En mi opinión, se ve bonito.
Articulaciones de codo y hombro
Aquí, en mi opinión, comienza la diversión. Con el fin de lograr un comportamiento aceptable de estas articulaciones, en contraste con la etapa muy suave de desarrollar una muñeca con una muñeca, tuvimos que jugar bastante con la mecánica y los controles.
Gestión, se decidió implementar servos sobre la base del 37Tx70L DPT habitual, que teníamos en la cantidad correcta de proyectos anteriores.
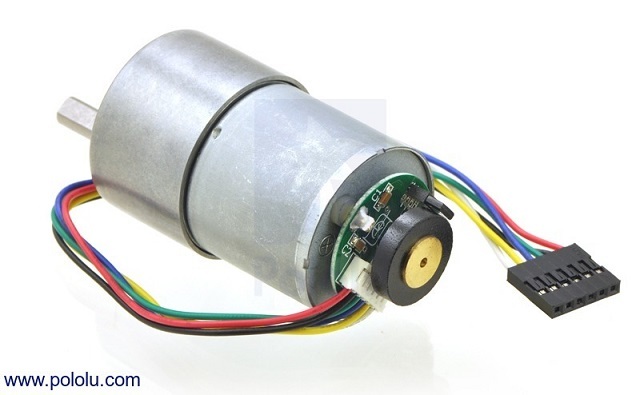
En general, nos gustaron los datos del DPT, pero tienen un inconveniente, a saber, el nivel de ruido. En el futuro planeamos reemplazarlos por otros idénticos, pero menos ruidosos.

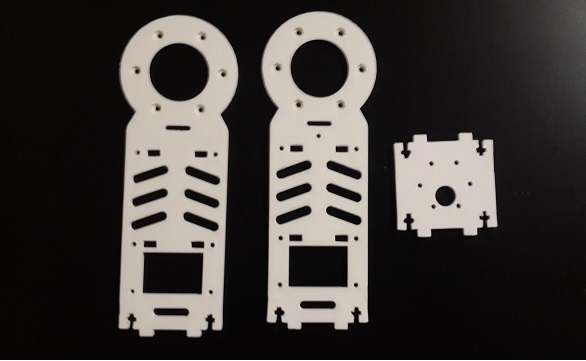
Los rodamientos y perfiles impresos en una impresora 3D forman la base de la construcción de rodamientos de las juntas. El rodamiento consiste en cuatro medias ranuras juntas en pares, y bolas de metal de 4, 6 y 8 milímetros.
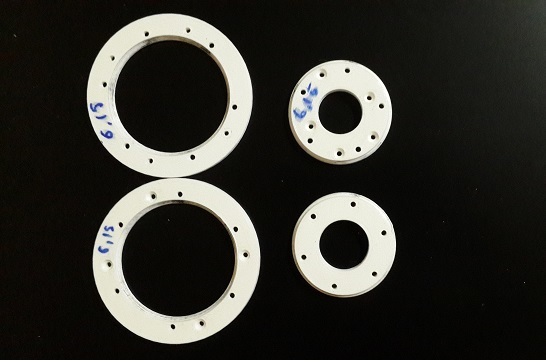
Los perfiles tienen ranuras para la interconexión; también se usan refuerzos adicionales. Toda esta felicidad se une mediante rayos.
Inicialmente, en algunos grados, el eje del motor estaba unido al rodamiento por medio de un acoplamiento.
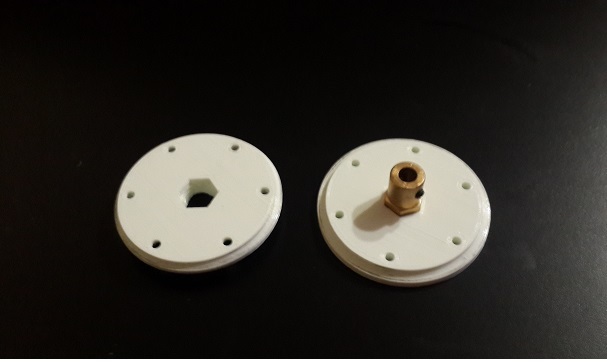
Pero por falta de unidades con las velocidades y el esfuerzo correctos, rediseñamos el diseño para transmisiones por correa.
Serva
Se impusieron los siguientes requisitos en la gestión del "servidor":
- Control del eje de salida
- Ajuste de velocidad
- Ajuste de esfuerzo (condición con un asterisco)
Primero, buscamos proyectos similares en Internet: no somos los únicos tan "inteligentes". Basado en
uno de los proyectos que nos gustó, estábamos muy descontentos con el resultado. El posicionamiento del eje de transmisión fue muy mediocre.
Como resultado, nos quedamos satisfechos solo con el desarrollo de nuestra solución personalizada. En este asunto, el artículo
"Mantener la posición en el servoaccionamiento: regulación subordinada vs modo paso" ayudó mucho, ¡por lo que muchas gracias al autor!
El esquema de gestión general fue el siguiente (el esquema se tomó del artículo anterior):
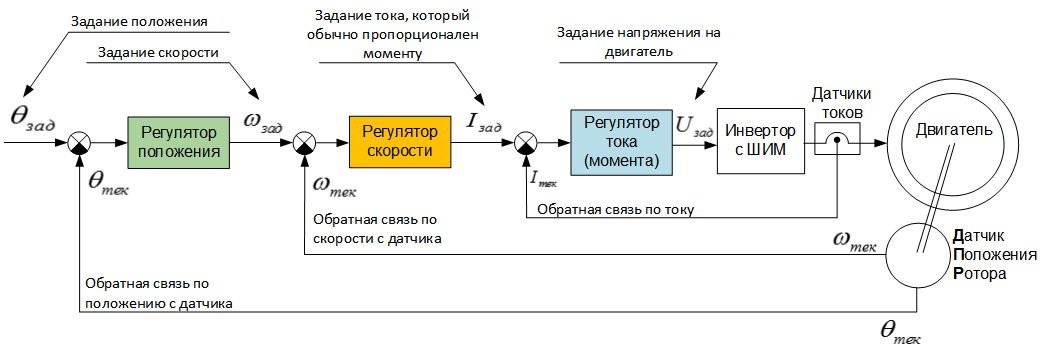
En nuestro circuito, el codificador magnético as5045 se usa como sensor de posición, y las lecturas de corriente se toman usando el sensor GY-712 5A.
Inicialmente, el Arduino Mega se usó para controlar las unidades, y aunque el resultado fue satisfactorio, finalmente cambiamos al STM32F4 más confiable y basado en tubos.
Aquí está el resultado de la unidad:
Habiendo logrado un resultado aceptable en el control del eje de salida del "servo" sin carga, se colocó en el brazo del manipulador. Y "de repente" resultó que controlar una unidad y un manipulador son dos cosas diferentes. El problema era que el manipulador "salchicha" en los puntos de destino, hubo un llamado "rebote de la sarga". Probamos diferentes coeficientes de los reguladores, pero todo fue en vano.
La causa de nuestros problemas fue la notoria gravedad. En la posición de suspensión (cuando el brazo se baja verticalmente hacia abajo), para regular 10 grados en la articulación del hombro, se necesitan coeficientes de un regulador y otros coeficientes para lograr la misma desviación en la posición horizontal. Porque el sistema no es demasiado dinámico, para determinar el nivel de influencia de la gravedad y, posteriormente, su compensación, utilizamos el acelerómetro de tres ejes habitual, que resolvió nuestro problema. Esta decisión no pretende ser una panacea, es solo nuestra manera. Quizás entre los lectores de nuestro artículo hay conductores eléctricos con experiencia que pueden aconsejar algo.
Aquí hay una prueba de video de uno de los grados del hombro (como resultó, el grado más difícil en términos de manejo).
Y, por supuesto, el video completo del manipulador:
Al final
En general, estamos satisfechos con la implementación de la primera versión del manipulador. El error promedio de todos los "servicios" varía en el rango de 0.2 - 1 grado (no haga esta cirugía con este manipulador). Realmente no me gustó el agarre, demasiado pesado (350 gramos). Lo más probable es que desarrollemos el nuestro. En el futuro, queremos aumentar la precisión de todos los grados, rehacer la mecánica de la muñeca, colocar nuestro servo "personalizado" allí y crear un sistema de seguridad.
Que sigue
Ahora estamos terminando el trabajo sobre la cabeza de Oscar-a, que se discutirá en el próximo artículo.
Gracias por su atencion! ¡Que tengan un buen día todos!