Hola a todos Hoy hablaremos sobre el jefe del robot promocional de los Oscar. A menudo, las personas están interesadas en comunicarse con el robot como si fueran de su propia especie: mirar a la cara y buscar una respuesta emocional durante el diálogo. Por lo tanto, el jefe de nuestro robot promocional debe convertirse en uno de los elementos principales que atraen la atención humana.
Para que la cabeza realmente "cobre vida", identificamos los siguientes requisitos:
- La cabeza debe tener dos grados de libertad: inclinación y rotación.
- Debe estar presente rastreando la cabeza del interlocutor
- Los ojos del robot deben responder al interlocutor.
Estructuralmente, la cabeza se dividió en dos partes:
Diseño de la cabeza
En primer lugar, comenzamos con el diseño de la cabeza para comprender cuál será el factor de forma y cómo colocar todo lo que se desea en la cabeza. En general, este proceso es iterativo y, a veces, muy difícil, especialmente para los ingenieros que previamente solo diseñaron engranajes.
Después de un par de iteraciones, obtuvimos un boceto, que tuvo en cuenta aproximadamente la ubicación de los servos y la mecánica de los ojos.
Cuello
La cabeza del robot está equipada con dos grados de libertad: inclinar y girar la cabeza. La base del diseño del cuello son los perfiles y las costillas, que ya hemos usado en el
manipulador .
Para controlar los grados de libertad, se utiliza nuestro servidor personalizado. Rotaremos nuestra cabeza a través de la velocidad, es decir la velocidad de rotación de la cabeza dependerá de la posición en el marco de la persona que se está rastreando, ya que el servidor puede controlar la velocidad. Cuanto más lejos esté la cara del centro, más rápido girará la cabeza. A medida que se acerque al centro, la velocidad disminuirá a cero. Por lo tanto, obtienes una rotación bastante suave de la cabeza.
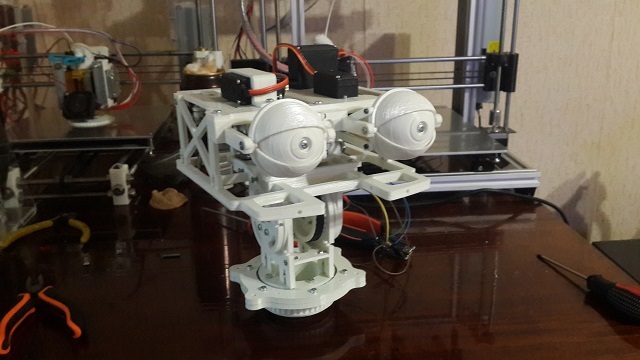
Ojos
Aquí también, no queríamos pasar mucho tiempo, así que decidimos buscar proyectos existentes de ojos animatrónicos, es bueno que tales proyectos sean un carro y un carrito pequeño. De los que encontramos, especialmente quiero señalar
un proyecto .
Lo tomamos como base. Y todo estuvo bien hasta que empezamos a tratar de combinar la mecánica de los ojos, el diseño de la cabeza existente y la mecánica del cuello. Al final, tuve que desarrollar mi propia "bicicleta". El resultado fue un diseño de ojo:

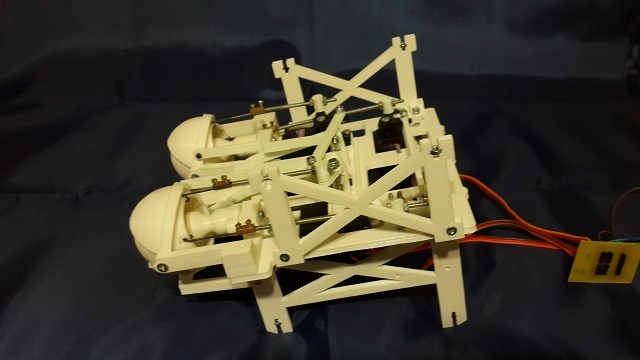
Los ojos son impulsados por arduino_nano. Para controlar el serv, tomaron la
biblioteca estándar. Las Servas se alimentan de una fuente de energía separada, Arduino no puede dar suficiente corriente. Al principio hubo problemas menores con el "rebote" que arruinó toda la estética. Luego encontraron la razón: un regulador de potencia de baja calidad, que lo reemplazó por
otro similar , el problema desapareció. Y aquí hay otra cosa, a los servos de pasatiempos no les gustan los cables largos, por lo que eliminamos la longitud adicional entre los servos y el controlador. El movimiento del ojo se implementa configurando el ángulo de rotación del servo.
Como prueba, utilizaremos a la segunda persona de nuestro estado: Dmitry Anatolyevich Medvedev. De repente, por el arduo trabajo, una subvención para el desarrollo del proyecto "caerá" sobre su cabeza.
Como funciona
Todo esto funciona de manera bastante simple, porque la cabeza y los ojos deben responder a una persona, entonces la fuente de información será idéntica para ellos: una cámara de video ubicada en la cabeza del robot. Cámara usada de Raspberry. Por cierto, aquí hicimos un pequeño defecto: tomamos una cámara con un ángulo de visión pequeño. Durante las pruebas, quedó claro que es necesario colocar cámaras de gran angular; luego, las expresiones faciales pueden ser más animadas, porque será posible mirar hacia otro lado desde un ángulo mayor.
Raspberry Pi 3 se utiliza como procesador de imágenes. Me gustaría decir que Malinka hace frente a esta tarea con confianza, pero es cierto a baja resolución, mientras que proporciona una carga notable en los 4 núcleos.
La detección de rostros se lleva a cabo mediante un instrumento clásico: la cascada Haar. Además, la frecuencia de detección de rostros es de 9 a 12 FPS.
Por analogía con una persona, el robot primero mira al interlocutor y luego vuelve la cabeza hacia él. A pesar de la velocidad de rotación de la cabeza relativamente alta disponible, la ralentizamos. Trayendo la velocidad de rotación de la cabeza de acuerdo con la velocidad de detección de rostros, obtuvimos movimientos suaves y elegantes.
Estábamos satisfechos con nuestra cabeza ensamblada. Que piensas ¿Qué más puedo agregar o hacer?
Que sigue
Ahora estamos completando el ensamblaje del segundo manipulador, después de lo cual pasaremos a la fabricación de una plataforma con un tronco. Y todo esto deberá exponerse en un edificio decente. Esperemos que en el próximo artículo presentemos nuestra creación en toda su gloria.
¡Quédate aquí, todo lo mejor para ti, buen humor y salud!