Motor
Stirling : un motor con un suministro externo de calor. El suministro de calor externo es muy conveniente cuando existe la necesidad de utilizar combustibles no orgánicos como fuente de calor. Por ejemplo, puede usar energía solar, energía geotérmica, calor residual de varias empresas.
Una buena característica del ciclo de Stirling es que su eficiencia es igual a la eficiencia del ciclo de Carnot [1]. Naturalmente, los motores Stirling reales tienen menor eficiencia y, a menudo, mucho más. El motor Stirling comenzó su existencia con un dispositivo que tiene muchas partes móviles, como pistones, bielas, cigüeñal, cojinetes [2]. Además, el rotor del generador estaba girando (Figura 1).
Figura 1 - Tipo alfa del motor StirlingMira el motor tipo Stirling Alpha. Cuando el eje gira, los pistones comienzan a destilar el gas del cilindro frío al caliente, o viceversa, del caliente al frío. Pero no solo destilan, sino que también se comprimen y expanden. Se está produciendo un ciclo termodinámico. Se puede imaginar en la imagen que cuando el eje gira de manera que el eje en el que se montan las bielas se encuentra en la parte superior, este será el momento de mayor compresión del gas, y cuando está debajo, la expansión. Es cierto que esto no es del todo cierto debido a las expansiones térmicas y las contracciones de gas, pero aproximadamente todo esto es cierto.
El corazón del motor es el llamado núcleo, que consta de dos intercambiadores de calor, caliente y frío, y entre ellos hay un regenerador. Los intercambiadores de calor generalmente se hacen lamelares, y el regenerador suele ser una pila de malla metálica. ¿Por qué necesitamos intercambiadores de calor? Está claro: calentar y enfriar el gas, y ¿por qué necesitamos un regenerador? Y el regenerador es un verdadero acumulador de calor. Cuando el gas caliente se mueve hacia el lado frío, calienta el regenerador y el regenerador almacena energía térmica. Cuando el gas se mueve del lado frío al lado caliente, el gas frío se calienta en el regenerador, por lo que se ahorra este calor, que sin el regenerador se gastaría irrevocablemente en calentar el medio ambiente. Entonces, un regenerador es algo absolutamente necesario. Un buen regenerador aumenta la eficiencia del motor en aproximadamente 3,6 veces.
Los fanáticos que quieran construir un motor de este tipo por su cuenta, quiero contarles más sobre los intercambiadores de calor. La mayoría de los motores Stirling de fabricación propia, de los que vi, no tienen intercambiadores de calor (estoy hablando de motores de tipo alfa). Los intercambiadores de calor son los pistones y cilindros mismos. Un cilindro se calienta, el otro se enfría. Además, el área de la superficie de intercambio de calor en contacto con el gas es muy pequeña. Por lo tanto, es posible aumentar significativamente la potencia del motor colocando intercambiadores de calor en la entrada de los cilindros. E incluso en la Figura 1, la llama se dirige directamente al cilindro, lo cual no es tan cierto en los motores de fábrica.
Volvamos a la historia del desarrollo de los motores Stirling. Por lo tanto, deje que el motor sea bueno de muchas maneras, pero la presencia de anillos rascadores de aceite y cojinetes redujo la vida útil del motor y los ingenieros trabajaron duro pensando en cómo mejorarlo, y se les ocurrió.
En 1969, William Bale investigó los efectos de resonancia en el funcionamiento del motor y luego fue capaz de hacer un motor para el que no se necesitan una biela ni un cigüeñal. La sincronización del pistón se produjo debido a los efectos de resonancia. Este tipo de motor se conoció como el motor de pistón libre (Figura 2).
Figura 2 - Motor de pistón libre StirlingLa Figura 2 muestra un motor de pistón libre de pistón beta. Aquí el gas pasa de la región caliente a la fría, y viceversa, gracias al desplazador (que se mueve libremente), y el pistón de trabajo hace un trabajo útil. El desplazador y el pistón oscilan en los muelles helicoidales, que se pueden ver en el lado derecho de la figura. La dificultad es que sus vibraciones deben estar en la misma frecuencia y con una diferencia de fase de 90 grados, todo debido a los efectos resonantes. Esto es bastante difícil de hacer.
Por lo tanto, se redujo el número de piezas, pero al mismo tiempo, se ajustaron los requisitos para la precisión de los cálculos y la fabricación. Pero la confiabilidad del motor ha aumentado indudablemente, especialmente en diseños en los que se utilizan membranas flexibles como desplazador y pistón. En este caso, el motor no tiene piezas de fricción. La electricidad, si se desea, puede eliminarse de dicho motor utilizando un generador lineal.
Pero esto no fue suficiente para los ingenieros, y comenzaron a buscar formas de deshacerse no solo de las partes frotadas, sino también de las piezas móviles. Y encontraron tal manera.
En los años setenta del siglo XX, Peter Zeperli se dio cuenta de que las oscilaciones sinusoidales de la presión y la velocidad del gas en el motor Stirling, así como el hecho de que estas oscilaciones están en fase, recuerdan increíblemente las fluctuaciones en la presión y la velocidad del gas en una onda de sonido de viaje (Fig. 3 )
Figura 3 - Gráfico de presión y velocidad de una onda acústica viajera en función del tiempo. Se muestra que las fluctuaciones de presión y velocidad están en fase.Esta idea le llegó a Zeperli no por casualidad, ya que antes de él había mucha investigación en el campo de la termoacústica, por ejemplo, el propio Lord Rayleigh en 1884 describió cualitativamente este fenómeno.
Por lo tanto, propuso abandonar por completo los pistones y los desplazadores, y usar solo una onda acústica para controlar la presión y el movimiento del gas. Esto da como resultado un motor sin partes móviles y teóricamente capaz de lograr la eficiencia del ciclo Stirling y, por lo tanto, Carnot. En realidad, los mejores indicadores son 40-50% de la eficiencia del ciclo de Carnot (Figura 4).
Figura 4 - Diagrama de un motor termoacústico con una onda de desplazamiento.Puede ver que un motor termoacústico de onda de marcha es exactamente el mismo núcleo, que consiste en intercambiadores de calor y un regenerador, pero en lugar de pistones y bielas, solo hay un tubo en bucle llamado resonador. Pero, ¿cómo funciona este motor si no tiene partes móviles? ¿Cómo es esto posible?
Primero, responda la pregunta, ¿de dónde viene el sonido? Y la respuesta es que surge por sí solo cuando se produce una diferencia de temperatura suficiente entre los dos intercambiadores de calor. El gradiente de temperatura en el regenerador le permite mejorar las vibraciones del sonido, pero solo una cierta longitud de onda igual a la longitud del resonador. Desde el principio, el proceso se ve así: cuando se calienta un intercambiador de calor caliente, se produce un micro crujido, posiblemente incluso grietas por deformaciones térmicas, esto es inevitable. Estos susurros son ruidos que tienen una amplia gama de frecuencias. De todo este rico espectro de frecuencias de sonido, el motor comienza a amplificar esa vibración de sonido, cuya longitud de onda es igual a la longitud del tubo - resonador. Y no importa cuán pequeña sea la fluctuación inicial, se amplificará al máximo valor posible. El volumen de sonido máximo dentro del motor ocurre cuando la potencia de amplificación de sonido por medio de intercambiadores de calor es igual a la potencia de pérdida, es decir, la potencia de amortiguación de las vibraciones de sonido. Y este valor máximo a veces alcanza valores enormes de 160 dB. Entonces dentro de un motor así es muy ruidoso. Afortunadamente, el sonido no puede salir, ya que el resonador está apretado y, por lo tanto, parado al lado del motor en funcionamiento, apenas es audible.
La amplificación de una cierta frecuencia de sonido se produce debido al mismo ciclo termodinámico: el ciclo de Stirling, que se lleva a cabo en el regenerador.
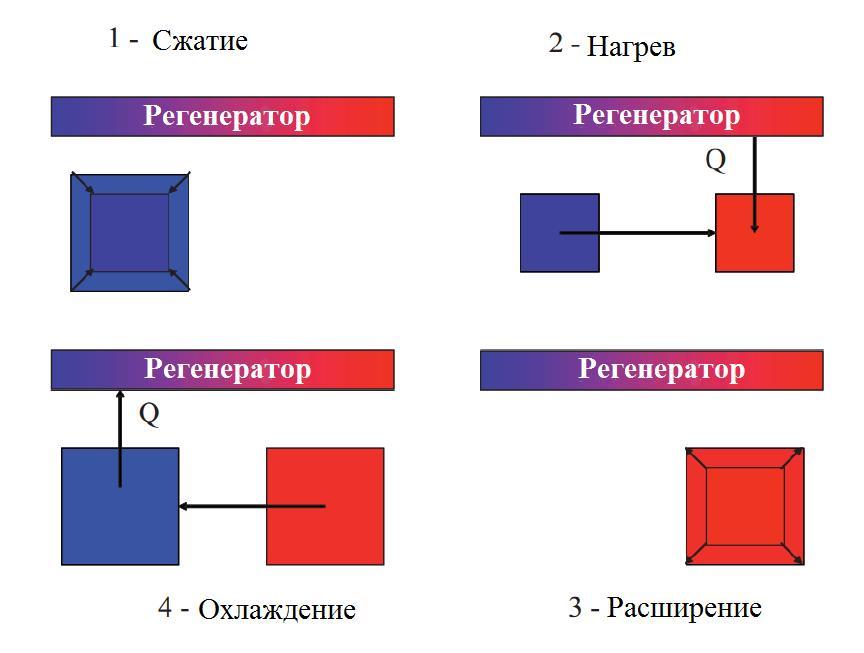 Figura 5 - Las etapas del ciclo son aproximadas y simplificadas.
Figura 5 - Las etapas del ciclo son aproximadas y simplificadas.Como ya escribí, en un motor termoacústico no hay partes móviles en absoluto, genera solo una onda acústica dentro de sí mismo, pero, desafortunadamente, es imposible eliminar la electricidad del motor sin partes móviles.
Típicamente, la energía se genera a partir de motores termoacústicos que usan generadores lineales. La membrana elástica oscila bajo la presión de una onda sonora de alta intensidad. Dentro de la bobina de cobre con el núcleo, los imanes montados en la membrana vibran. Se genera electricidad.
En 2014, Kees de Blok, Pawel Owczarek y Maurice Francois de Aster Thermoacoustics mostraron que una turbina de impulso bidireccional conectada a un generador es adecuada para convertir la energía de las ondas sonoras en electricidad [3].
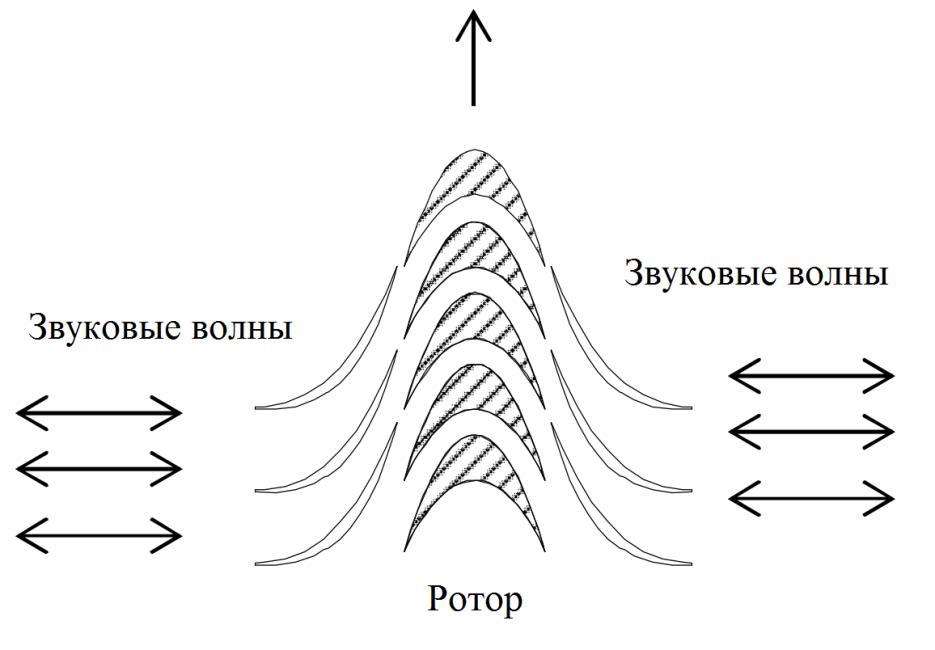 Figura 6 - Diagrama de una turbina de pulso
Figura 6 - Diagrama de una turbina de pulsoLa turbina de impulso gira en la misma dirección independientemente de la dirección del flujo. La Figura 6 muestra esquemáticamente las palas del estator en los lados y las palas del rotor en el medio.
Y así, la turbina se ve en realidad en ellos:
 Figura 7 - Vista externa de una turbina de impulso bidireccional
Figura 7 - Vista externa de una turbina de impulso bidireccionalSe espera que el uso de una turbina en lugar de un generador lineal reduzca significativamente el costo de construcción y aumente la potencia del dispositivo hasta la potencia de las centrales térmicas típicas, lo cual es imposible con los generadores lineales.
También desarrollo mi propio motor termoacústico, más sobre el cual se puede encontrar en el video a continuación, así como en este artículo:
"Creación y arranque de un motor termoacústico"Lista de fuentes utilizadas[1] M.G. Kruglov. Motores Stirling. Moscú "Ingeniería", 1977.
[2] G. Lector, C. Hooper. Motores Stirling. Moscú "Mir", 1986.
[3] Kees de Blok, Pawel Owczarek. Conversión de energía acústica a eléctrica, 2014.