Las prótesis biónicas de la generación pasada generalmente se controlan con la ayuda de señales mioeléctricas, que surgen como resultado de las contracciones musculares de la mano humana. Manejar una prótesis de este tipo no es fácil: requiere una cierta concentración, y la efectividad de las acciones exitosas deja mucho que desear. No es fácil hacer lo que quieres la primera vez. En cuanto a la precisión de las acciones, estas prótesis están lejos de las acciones "intuitivas" de una mano real viva.
En los últimos años, los investigadores se han centrado principalmente en la precisión del reconocimiento de señales mioeléctricas, y la precisión del reconocimiento de los movimientos de los dedos individuales ha alcanzado el 90%. Pero por varias razones técnicas, el uso masivo de estas prótesis "inteligentes" es muy limitado.
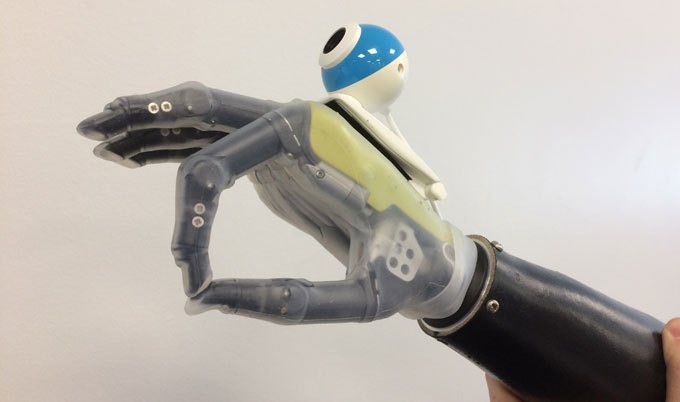
Un nuevo desarrollo de ingenieros de la Universidad de Newcastle (Reino Unido) ofrece un enfoque fundamentalmente diferente. Una mano equipada con una cámara de video reconoce un objeto frente a él y determina la mejor manera de agarrarlo. Actúa de forma automática y casi instantánea, sin esfuerzo adicional por parte del hombre. De hecho, la mano biónica tiene su propia visión.
Anteriormente, los científicos experimentaron con cámaras estéreo y varios algoritmos de reconocimiento de objetos. Paralelamente, se crearon nuevos modelos de manipuladores para robots; allí, las tecnologías de visión por computadora son muy similares a las prótesis biónicas para las personas. Fue en el campo de la robótica que se probaron las tecnologías más prometedoras de visión artificial y aprendizaje profundo.
Los ingenieros de la Universidad de Newcastle utilizaron estos desarrollos de sus predecesores y apuntaron al sistema de visión artificial para reconocer el
tipo de captura de objetos de varios tipos, y no en función de una medida específica de su tamaño. Es decir, los objetos después de entrenar la red neuronal se clasifican precisamente por el tipo de captura, y no por el tipo o categoría del objeto. Los autores creen que debido a un enfoque tan fundamentalmente nuevo, pudieron mejorar significativamente la velocidad del sistema, ya que ignora detalles innecesarios.
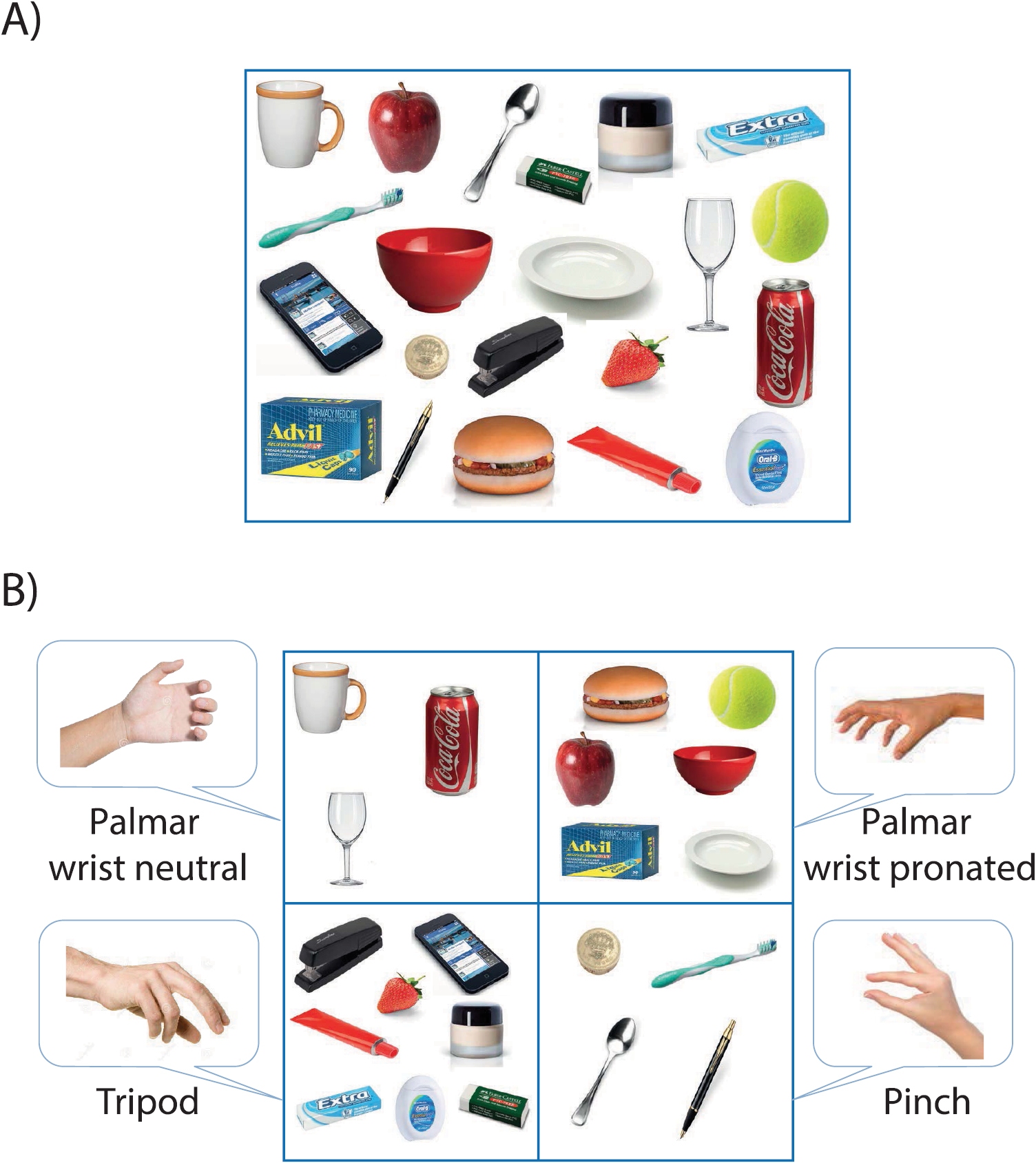 A modo de comparación: clasificación por categoría de objeto (arriba) o por uno de los cuatro tipos de captura (abajo)
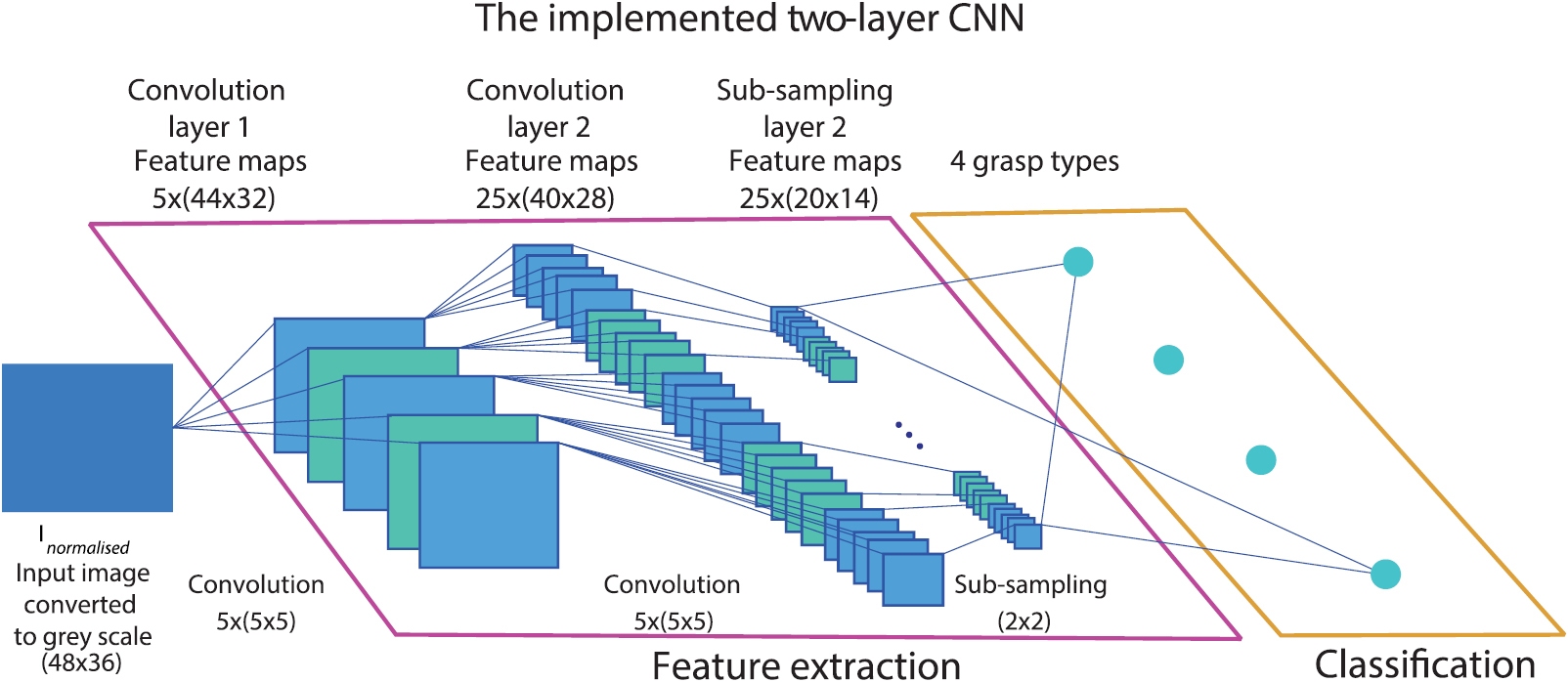
A modo de comparación: clasificación por categoría de objeto (arriba) o por uno de los cuatro tipos de captura (abajo)Se utilizó una red neuronal convolucional para entrenar el sistema. Resultó que su arquitectura es perfecta para este tipo de tarea, es decir, para prótesis biónicas de la mano. Por ejemplo, otros métodos de visión artificial experimentaron problemas cuando se encontraron con objetos que no entraban en ninguna de las categorías conocidas. Pero la identificación de objetos desconocidos es una de las cualidades más importantes de una prótesis biónica con visión artificial. Por lo tanto, la red neuronal convolucional es ideal para tal tarea.
El sistema fue entrenado en el
banco de imágenes de Amsterdam , donde hay una gran cantidad de objetos domésticos.
La arquitectura de una red neuronal convolucional de dos capas para la extracción y clasificación de características se muestra en la siguiente ilustración.
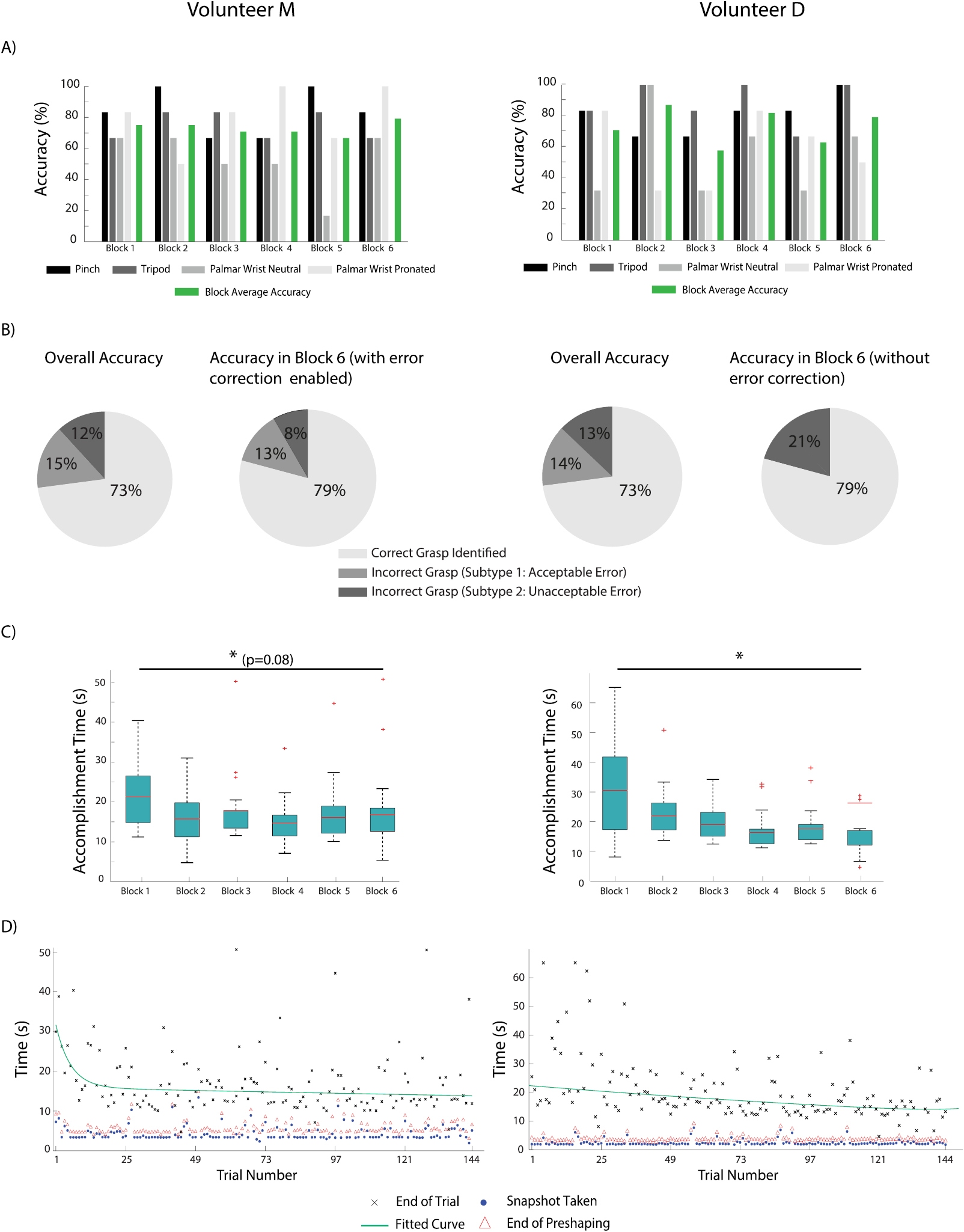
En pruebas en pacientes reales con prótesis, el sistema se probó en 8 objetos conocidos y 16 desconocidos en una posición aleatoria. Los resultados para los dos voluntarios se muestran en los gráficos a la izquierda y a la derecha. Teniendo en cuenta los errores permitidos, la precisión del reconocimiento y la captura de objetos fue del 88% y 87% para el primer y segundo voluntarios, respectivamente.
Lo más importante, una prótesis biónica de este tipo funciona en tiempo casi real: el tipo de captura se selecciona en milisegundos, en contraste con 0,75-24 segundos para los brazos biónicos, donde la visión artificial realiza la clasificación de los objetos. Incluso las mejores prótesis biónicas de este tipo,
CyberHand y
SmartHand, pueden manejar el reconocimiento en 4 y 1 segundo, respectivamente. Están ejecutando computadoras potentes y muestran una precisión de captura del 93% y 94%, respectivamente. Aunque la precisión es ligeramente mayor allí, la captura en tiempo real o con una pausa de un segundo es una gran diferencia, por lo que no se debe subestimar el logro de los ingenieros biomédicos británicos. Esta es la primera mano biónica que puede agarrar objetos "intuitivamente", como si no pensara. Una persona solo da una señal con un pequeño movimiento del músculo de que el objeto necesita ser capturado, y una mano inteligente con una red neuronal rápidamente hace el resto por sí misma.
El artículo científico fue
publicado el 3 de mayo de 2017 en la revista
Journal of Neural Engineering (doi: 10.1088 / 1741-2552 / aa6802).