Si antes de volar vuela sin parar por la ventana, no llegue a una conclusión prematura de que es estúpido. Quizás este es un robot en miniatura con un sistema de IA en modo de autoaprendizaje.
 Un UAV se estrelló 11 500 veces contra los objetos circundantes, volando por caminos seleccionados al azar
Un UAV se estrelló 11 500 veces contra los objetos circundantes, volando por caminos seleccionados al azar¿Cómo enseñar a un vehículo aéreo no tripulado a moverse a lo largo de una ruta determinada, esquivando obstáculos? ¿Es posible prescindir de un mapa digital en 3D cuando se trata de navegación interior? Para resolver este problema, existen varias tecnologías adecuadas, incluida la
capacitación en
simulación , en las que el "maestro" le enseña al dron a volar a lo largo de diferentes trayectorias, corrigiendo sus acciones si es necesario. Poco a poco, el UAV aprende rutas. Pero este enfoque está claramente limitado por el conjunto de datos de entrada: el maestro no puede acompañar sin cesar al dron.
En los últimos años, los sistemas de aprendizaje automático sin un maestro comenzaron a desarrollarse rápidamente (auto supervisados
aprendizaje) Probaron ser excelentes en una serie de tareas:
navegación ,
agarrar objetos (en robótica) y
tareas de "empujar / tirar" (física intuitiva). Pero, ¿son los sistemas de autoaprendizaje capaces de dominar una tarea tan compleja como la navegación en interiores y superar las limitaciones del entrenamiento de simulación?
Estudios anteriores han demostrado que tales sistemas son realmente capaces de aprender sin un maestro en un simulador, y que el conocimiento entrenado se puede transferir al mundo real. Pero en la práctica, otra pregunta es más relevante: ¿la autoeducación en el mundo real funciona en una sala arbitraria, sin un simulador y un mapa precompilado? Después de todo, es precisamente una tarea que cada uno de nosotros enfrentaremos cuando compre un robot y lo lleve a casa. Debe estudiar la situación de forma independiente y comenzar a navegar en cualquier casa (anteriormente es mejor eliminar todos los objetos frágiles de las habitaciones y esconderse también).
Investigadores de la Universidad Carnegie Mellon (EE. UU.) Establecieron la tarea más difícil al colocar un quadrocopter con una red neuronal para el auto entrenamiento en la sala más difícil de navegar con una gran cantidad de habitaciones y muebles. Los autores enfatizan que otros estudios intentan simplificar el ambiente para evitar colisiones. Ellos, por el contrario, querían llevar el UAV al máximo número de colisiones y accidentes, para que el robot pudiera aprender de esta experiencia. Los científicos han diseñado un sistema de autoestudio que tiene en cuenta esta experiencia negativa, así como la experiencia positiva de un vuelo exitoso a lo largo de las trayectorias.
El quadcopter AR Drone 2.0 bajo el control de un sistema de aprendizaje automático se probó en 20 habitaciones de la casa y, como resultado, aprendió a evitar efectivamente colisiones en cada una de estas habitaciones. Duración del entrenamiento: 40 horas de vuelo. Los investigadores dicen que el costo de las piezas de drones es pequeño y fácil de reemplazar, por lo que la probabilidad de accidentes catastróficos podría descuidarse.
Todas las colisiones fueron completamente al azar. Los UAV se colocaron en un punto arbitrario en el espacio, y él voló en una dirección aleatoria. Después del accidente, regresó al punto de partida, y nuevamente voló en una dirección aleatoria, hasta que nuevamente se estrelló en algún lugar.
La cámara quadrocopter dispara a 30 cuadros / s, y después del accidente, todos los cuadros se dividen en dos partes: los cuadros con una buena trayectoria se colocan en el grupo positivo y los cuadros tomados inmediatamente antes de la colisión se colocan en el grupo negativo. En el proceso de entrenamiento, el dron se estrelló contra los objetos circundantes 11.500 veces, y reunió una de las bases de accidentes de UAV más grandes del mundo. Esta "experiencia negativa" contiene información sobre todas las formas posibles en que un quadrocopter puede estrellarse en algún lugar.
Se transmitieron grupos de experiencias positivas y negativas como entrada a la red neuronal, que aprendió a hacer predicciones sobre si una experiencia positiva particular de la trayectoria actual conduciría a la aparición de experiencia negativa de la muestra de colisión. Es decir, la red neuronal comenzó a predecir dónde volar.
El diagrama de la red neuronal se muestra en la siguiente ilustración. El peso de las capas convolucionales (gris) se calculó de antemano de acuerdo con la clasificación de ImageNet, pero en las capas conectadas (naranja) los pesos se eligieron al azar, y los valores más óptimos se asimilaron durante el proceso de autoaprendizaje, basados completamente en datos de accidentes. La ilustración muestra los datos de entrada: cuadros de la cámara (izquierda) y los datos de salida de la red neuronal (la decisión de volar en línea recta, girar a la izquierda o derecha).

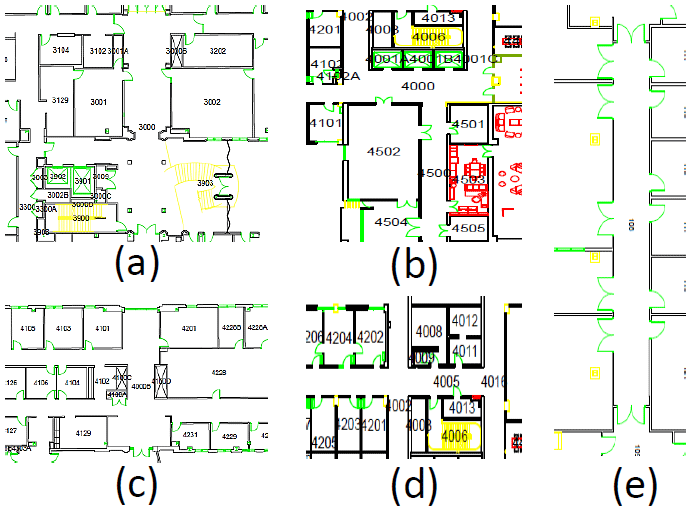
El siguiente diagrama muestra un campo de pruebas: un edificio de cuatro pisos donde se llevó a cabo un entrenamiento de autodonejo.
La salida fue un sistema de navegación sorprendentemente efectivo para drones. Un enfoque bastante simple para el autoaprendizaje es muy efectivo específicamente para habitaciones con una gran cantidad de obstáculos, incluidos obstáculos en movimiento como las personas.
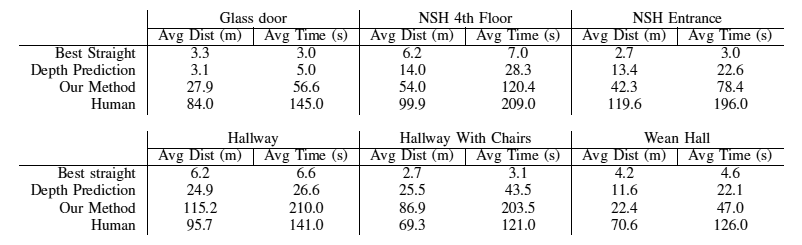
Las pruebas comparativas mostraron que este sistema de navegación es de 2 a 10 veces más efectivo que
los sistemas de
autoaprendizaje con una estimación de distancia monocular . Especialmente la diferencia aparece junto a las paredes de vidrio y paredes sin marcas de identificación, que tradicionalmente complican el trabajo de este último.
El trabajo científico fue
publicado el 19 de abril de 2017 en el sitio de preimpresión arXiv.org (arXiv: 1704.05588v2).