Hoy quiero contarles un poco sobre lo interesante que sucedió desde que
se publicó el
último artículo , donde conté cómo los tres hicimos GPS submarino en un año.
Decidimos en tiempo real evaluar la discrepancia entre nuestro GPS subacuático y el GPS real. Y no solo con GPS, sino con datos combinados de GPS / GLONASS. Si estás interesado en lo que pasó, ¡bienvenido a cat!
En general, ya lo hemos comprobado de alguna manera, pero en buenas condiciones "marinas". Ahora surgió la idea de verificar todo, de hecho, en un charco. Aquí debo explicar que para cualquier hidroacústica, los cuerpos de aguas poco profundas se consideran (y no en vano) los más difíciles. Algunos fabricantes no trabajan en aguas poco profundas, dicen que hay una capa superficial terrible con gas disuelto y reflejos múltiples, etc.
En general, hay un
charco maravilloso cerca de nosotros.
Así se ve desde la orilla:

La profundidad máxima es de aproximadamente 2-2.5 m, es decir, un cuerpo de agua más poco profundo en el que se puede requerir navegación, es difícil de imaginar.
Especialmente para los próximos experimentos, se compró un barco cebo controlado por radio chino, ideal para nuestros propósitos: es suficiente (a veces me parece que es demasiado) un barco espacioso, de baja velocidad, que puede modificarse fácilmente.
Así se veía originalmente el barco:

Luego llevamos a cabo una serie de mejoras. La electrónica nativa se mantuvo casi en su totalidad y solo se movió ligeramente, con la excepción del mecanismo para restablecer el cebo; como innecesario, se desmanteló por completo.
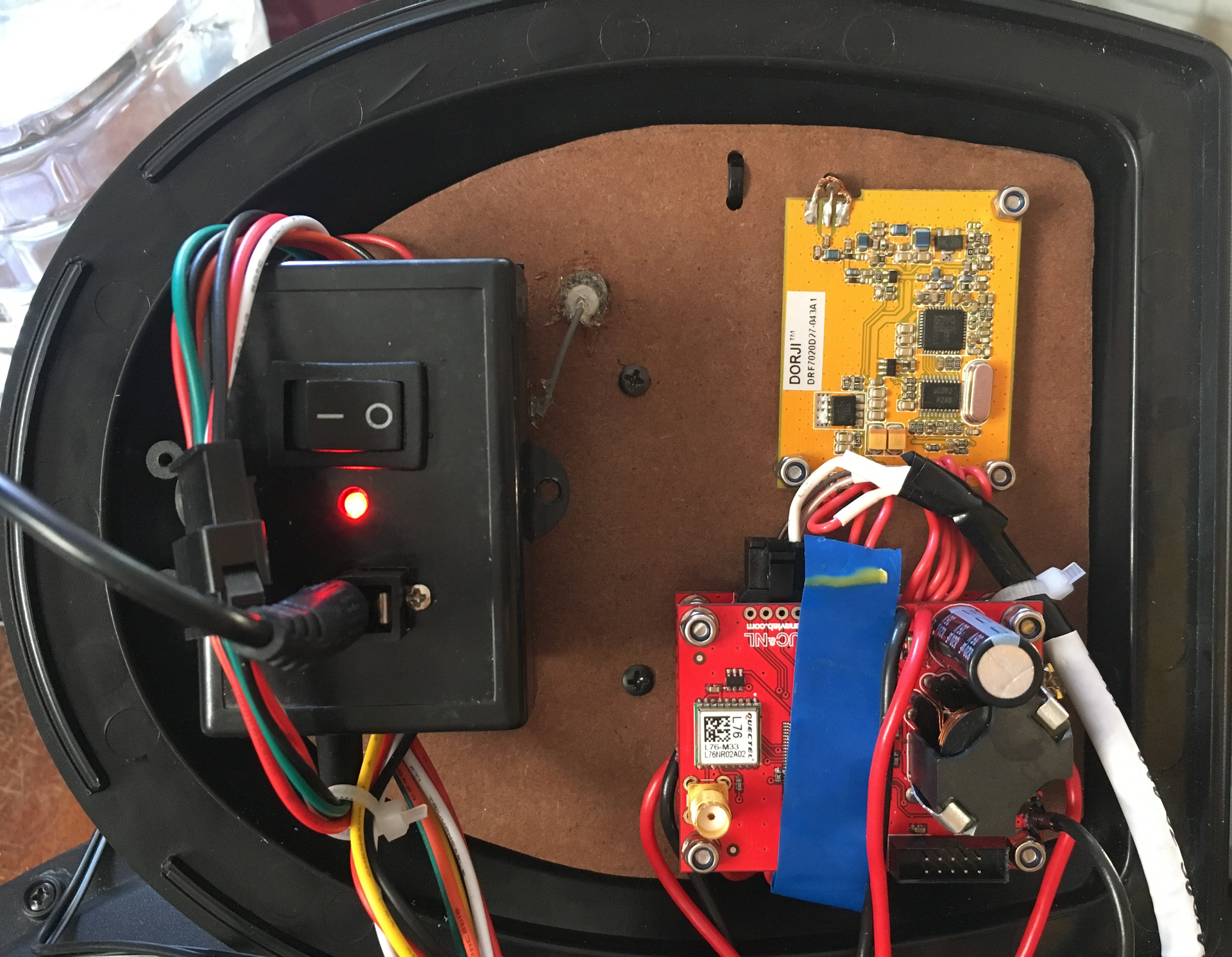
Además instalado en el barco:
- una placa con un receptor GPS / GLONASS patentado (no visible en la foto, debajo del panel de panel duro);
- Módulo de radio DORJI de 433 MHz + antena;
- nuestra placa con un procesador que analiza la salida del módulo GPS, receptor de navegación acústica y envía todo por el aire;
- una batería de plomo adicional de 1.5 Ah * de la cual se alimentan todos nuestros consumidores;
- Conector de carga Bulgin Bucaneer para ello;
- un interruptor de palanca con una tapa de goma (como en nuestras boyas), que incluye todos nuestros sistemas;
- un par de entradas de cable simples a través de las cuales se inserta el cable del receptor de navegación RedNODE en la embarcación y se emite el cable del emisor acústico (utilizado en otro experimento).
En la foto se ve otro tablero, esto es solo de otro experimento.
Como dije en un artículo anterior, nuestro GPS submarino es un sistema de navegación de base larga, y para su funcionamiento en un estanque, se deben instalar cuatro boyas de relé de señal de navegación por satélite flotante. Este es el principal inconveniente de la base larga: aún debe poner algo en el estanque, lo que significa que necesita un bote. Pero esta vez queríamos mostrar cómo se puede hacer todo exclusivamente desde la orilla.
Éramos cuatro (sí, ¡ya no somos tres!), Y según la idea, todos tomaron una boya con él y fueron a su punto en la orilla del estanque, donde colocó su boya desde la orilla en una cuerda (para que no navegaran, no tomaron el bote) .
Aquí en mi punto (Boya No. 4) se parecía a esto:

En la orilla donde estaba ubicado, había dos enfoques convenientes. Mis dos colegas en la orilla opuesta fueron menos afortunados: simplemente hay una playa bastante suave, cubierta de juncos, pisoteada por pescadores en algunos lugares. Como resultado, como se verá desde la ubicación, la boya No. 3 tuvo que ser movida muy lejos del resto, simplemente porque en ese lugar era bastante difícil acercarse al agua.
La captura de pantalla a continuación muestra cómo se colocaron (distribuyeron) las boyas durante el experimento:

Por cierto, mirando hacia el futuro, diré que las coordenadas de las boyas se obtienen del receptor de navegación y no se miden directamente en tierra.
La foto muestra muy claramente que a la izquierda de la línea condicional entre las boyas No. 1 y No. 2 es poco profunda. De tal manera que una garza camina allí a pie (tiene alrededor de una rodilla allí), que esta vez no funcionó.
Desde mi publicación, la orilla opuesta se ve en la siguiente foto, y la persona sentada a la izquierda es nuestra, sostiene la boya No. 1 en la cuerda.

En la misma foto, nuestro barco en sí es visible en el proceso de navegación.
Así es como se ve montado junto a una de nuestras boyas:

Los cables de la boya tenían que hacerse más cortos tirando de ellos hacia el ojo de carga de la boya con una regla de nylon, de lo contrario el emisor simplemente estaría acostado sobre un fondo fangoso. En la posición normal, la distancia desde el borde del agua hasta el transmisor acústico de la boya es de 1,5 metros. También puede ver que el receptor de navegación acústica está montado en un cable suficientemente largo. Su longitud es de 1,5 metros, recuerda esto, en el futuro explicará algunas de las características de los resultados.
La influencia de un cilindro que cuelga libremente sobre el movimiento del bote es muy significativa. De hecho, el radio de giro de los ya indecentes 3-4 metros se volvió aterrador: en aguas tranquilas se necesitan 10-15 metros para girar. Mis intentos de mantener el barco en curso con un ligero viento lateral serán visibles en las pistas resultantes.
Hablando de pistas. Antes del experimento, no había una certeza del 100% de que el sistema, en principio, funcionaría adecuadamente en tales condiciones. Sin embargo, vi el primer punto en la pantalla casi un minuto después de que el receptor se sumergió en agua.
Vi esto en la pantalla de nuestra aplicación tecnológica, algo así:
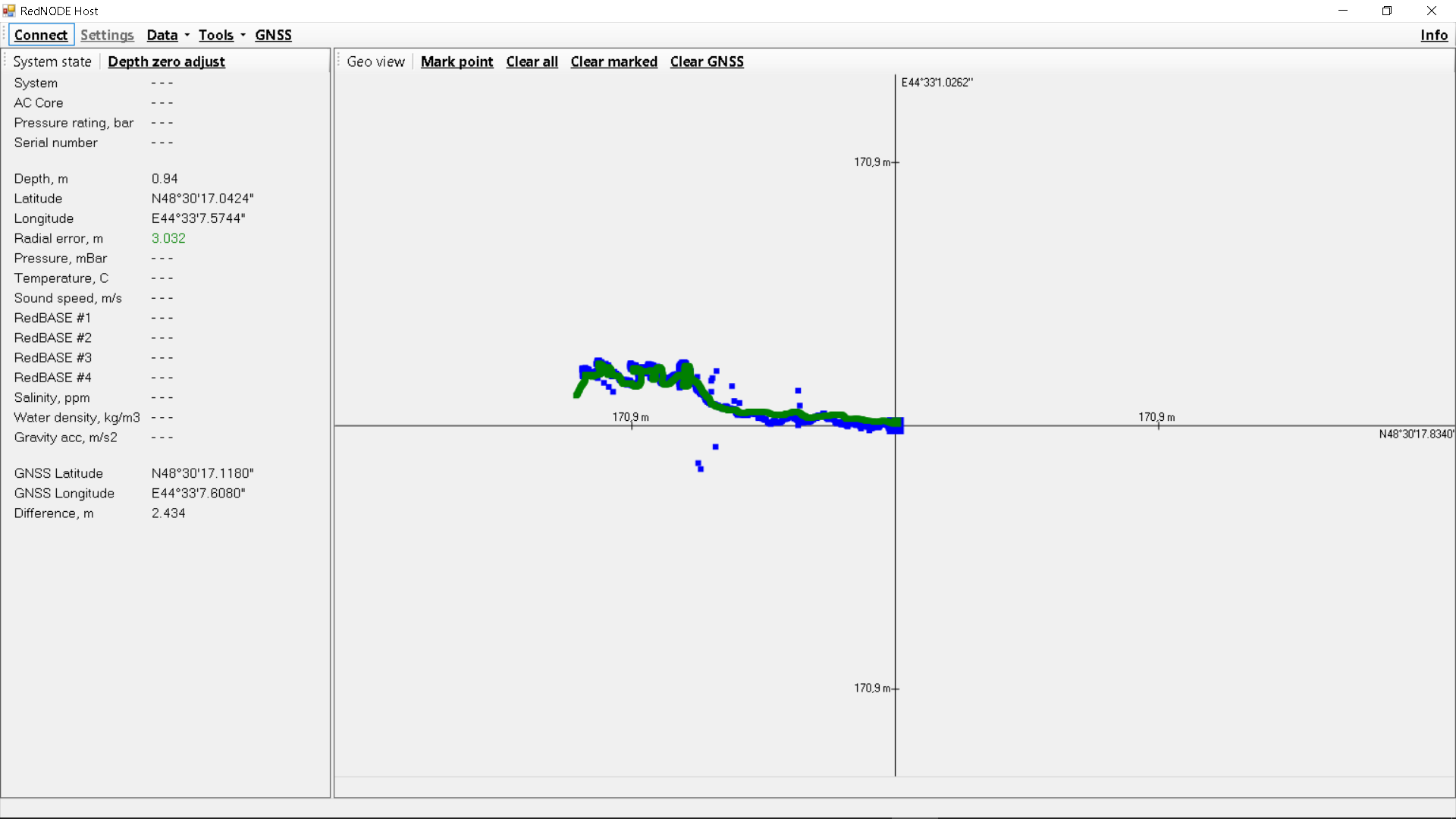
La pista del receptor GPS / GLONASS se muestra en verde, y la pista del receptor acústico se muestra en azul. La línea inferior en el panel izquierdo muestra el valor de la diferencia en metros entre la lectura actual de acuerdo con GPS / GLONASS y el sistema de navegación acústica. Debo decir de inmediato que el "combinador" de datos recopilados rápidamente seleccionó solo parte de la información que transmite el receptor de navegación y muchos campos permanecieron vacíos.
Y finalmente, las pistas resultantes en todo su esplendor:
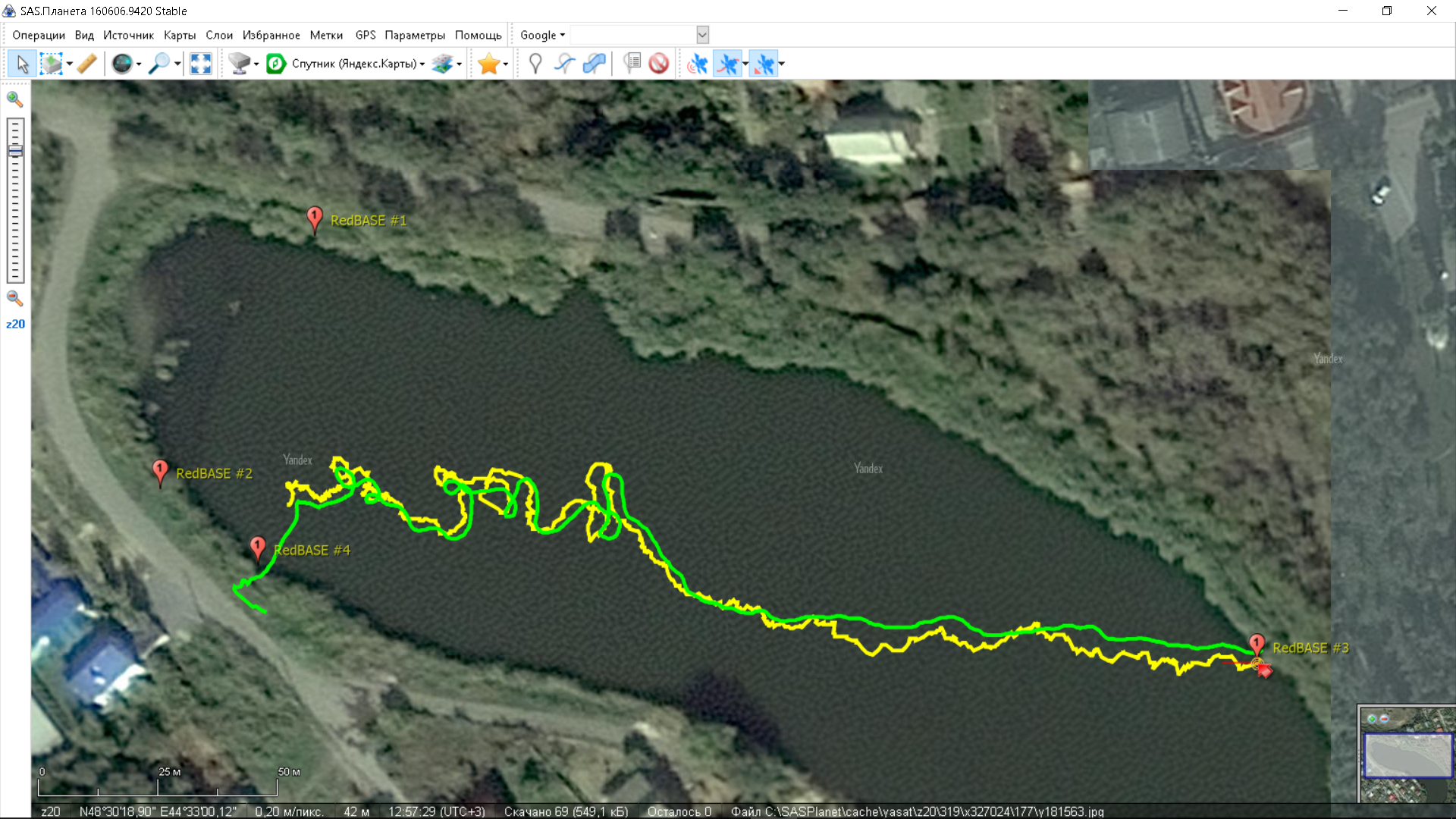
La diferencia máxima entre las trayectorias en diferentes lugares es de aproximadamente 3 metros, lo que se explica, en primer lugar, por el hecho de que el sistema de altavoces se ve mucho más afectado por el movimiento del objeto posicionado en la precisión de la posición calculada, simplemente porque entre la recepción de señales de las boyas se las arregla para moverse lo suficiente y, en segundo lugar, el hecho de que el receptor de navegación acústica colgaba de un cable de 1,5 metros detrás del bote con todas las consecuencias resultantes.
Las repeticiones de la trayectoria con cierto retraso obtenidas utilizando el sistema de navegación acústica en aquellas partes de la misma donde el barco estaba maniobrando intensamente parecen muy características.
En general, no planeamos una caminata tan larga por miedo a perder el bote en las cañas, pero en algún momento me di cuenta de que era poco probable que pudiera desplegar el barco de manera segura y decidí dirigirlo en el viento, lo que lo llevó a nuestra boya No. 3, donde estaba a salvo y atrapado por mi colega.
¿Qué tenemos de los resultados del experimento?
- el sistema funciona en un depósito monstruoso en términos de hidrología
- la precisión es comparable a la precisión del GPS terrestre
- no requiere ninguna calibración
- no se integra más complicado que un receptor GPS convencional
- el despliegue no lleva mucho tiempo (en nuestro caso, tres boyas estaban en el agua después de 5 minutos, y la cuarta después de otras 10, y luego, todo este tiempo se dedicó a moverse por el estanque)
Es inconveniente mostrar las pistas en detalle usando la imagen, por lo que subo las pistas por separado para que todos los interesados puedan analizarlas:
pistas RedWAVE 12-05-2017Gracias por su atencion
"¡Y eso es todo por hoy!" (C)
Atencion Actualización! Al final resultó que, si sigues el enlace a nuestro
charco , puedes ver que un avión no tripulado supuestamente voló justo por encima del lugar de nuestros experimentos al momento de disparar el área:
