Como prometí en una
publicación anterior , llegué al lugar de ensamblaje del robot Kiki y examiné todas las etapas del trabajo. Por lo tanto, realizaré un breve recorrido y hablaré sobre lo que logré descubrir por mí mismo. Y al mismo tiempo, solicité un desmontaje parcial del robot en funcionamiento para averiguar qué había dentro.
SpoilerAl final del artículo, encontrará un video con un ensamblaje parcial del robot.
Comenzaré, tal vez, con el hecho de que el robot puede trabajar de forma autónoma y bajo el control de un operador. Cuando fui al centro de desarrollo, me encontraron con 7-8 robots y algunos de ellos se movían periódicamente y respondían preguntas. Uno de los robots estaba en la etapa de los mecanismos de depuración y transmitió el
mensaje a todos los usuarios de Habr.

Pero comenzaremos con un modelo completamente funcional. Todos los robots tienen números de serie, ya se han lanzado 3 o 4 series y se está preparando un modelo más avanzado, aunque los robots reales pueden hacer mucho. Comencemos con la apariencia y la interacción con el mundo exterior.

El robot y el operador reciben la imagen de dos cámaras a la vez: una está en el lugar del tercer ojo y la segunda está al nivel de las rodillas. Esta posición no fue elegida por casualidad: a través de la cámara superior, el operador y el robot reciben la imagen principal para interactuar con cualquier visitante. Además, la imagen de esta cámara es procesada por el módulo de software de reconocimiento facial y determina el sexo, la edad y el estado de ánimo. La cámara inferior se necesita exclusivamente para el movimiento y el movimiento del robot alrededor del sitio o a través del laberinto de stands en las exposiciones, porque está rígidamente fija y siempre mira el movimiento. También hay un micrófono en el nivel del pecho, por lo que el sistema de reconocimiento de voz y el operador escuchan el diálogo de una persona con el robot.

En general, en el robot hay tantos servos y grados de libertad que te preguntas. Por ejemplo, 6 motores proporcionan el trabajo de la mano.
Por cierto, uno de los pasatiempos más populares en la exposición es un apretón de manos. Los desarrolladores limitaron deliberadamente la fuerza con la que el robot puede apretar la mano. Además, Kiki mueve sus dedos en una combinación 4 + 1. Pero, si lo desea, puede reconstruir este nodo y hacer que mueva cada dedo por separado.


En general, los ingenieros trabajaron muy bien en la mecánica. La cabeza puede girar e inclinarse. El cuerpo se inclina hacia adelante y hacia atrás, y la propia Kiki puede girar literalmente en un parche.
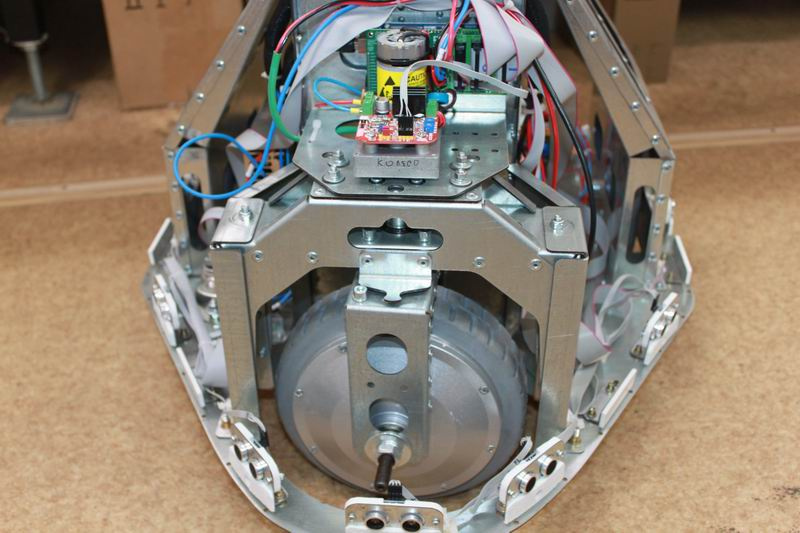
La foto muestra claramente que la rueda giratoria puede girar 180 grados. En la misma imagen, los sensores ultrasónicos son visibles a lo largo del perímetro de la base. Entonces, el robot ve un obstáculo cuando se mueve y puede detenerse o rodearlo: así es como lo programará el programa.
Todos los movimientos del robot se llaman animaciones. Cualquier acción se implementa escribiendo un script en el menú del robot, por lo que no llevará mucho tiempo enseñar algo nuevo. Simultáneamente con los movimientos, el robot puede moverse y hablar.

El marco de soporte es bastante potente, por lo que no teme a las cargas. La propia Kiki resultó ser bastante alta, algo así como unos 150-160 centímetros, por lo que para mantener la estabilidad, los ingenieros encontraron una excelente solución: el centro de gravedad se desplazó lo más bajo posible debido al uso de una batería de gel pesado. Esto logró lograr una alta capacidad de una batería libre de mantenimiento, un bajo precio por unidad de energía almacenada y un buen lastre para la estabilidad del robot. La duración total de la batería, sin recargar, es de aproximadamente 8-10 horas, lo que equivale aproximadamente a un día hábil. Al mismo tiempo, Kiki se puede conectar a una red de 220V en cualquier momento y se cargará automáticamente, manteniendo la operatividad, aunque con menos movilidad.
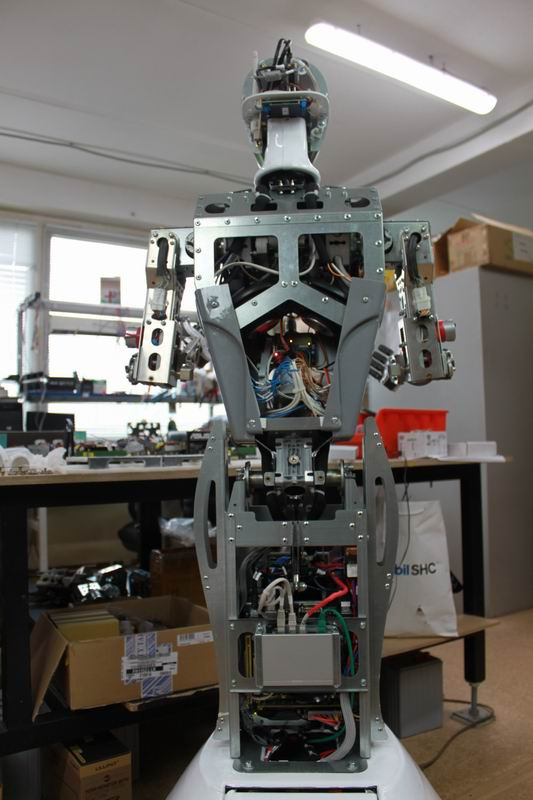
Es curioso que dentro del robot haya incluso una pequeña red de área local. Si observa de cerca, puede ver el interruptor, en el que 4 cables de conexión ya están atascados. Varias computadoras "a bordo" proporcionan su trabajo a la vez. Desafortunadamente, los ingenieros no dieron una imagen más detallada del hierro, citando el hecho de que no podían dejarme salir con vida.
Incluso una ama de casa puede manejarloEn cuanto a la gestión, es híbrido. Puede ejecutar el robot completamente fuera de línea e incluso establecer un mapa de movimiento, luego Kiki recorrerá el pasillo, hablará, mostrará fotos y videos en la pantalla, y también responderá preguntas de todos los interesados. La segunda opción: modo fuera de línea + operador. El operador controla los movimientos y, a veces, responde preguntas si uno no estaba en la base de datos. Por ejemplo, el robot de Kiki está preparado para encontrarse con los visitantes del banco, reconocerlos por sus caras y saludarlos por su nombre, notificando simultáneamente al gerente personal que el cliente ha llegado. Pero el cliente quería hablar sobre el significado de la vida, el futuro o las criptomonedas. En este punto, el operador entra en la conversación, simplemente ingresando los textos de las respuestas en el generador de sonido.
Agregue a esto que cada uno de los robots puede ser controlado tanto por el operador, dentro del radio de cobertura de Wi-Fi, como de forma remota a través de Internet. La velocidad mínima necesaria para el funcionamiento normal es de 10 Mbit / s, pero para un funcionamiento cómodo es mejor tener un canal de 30 Mbit / s. Además, todos los robots funcionan en un servidor grande, reponiendo la base de datos. Entonces, los robots en diferentes sucursales del banco reconocerán al cliente, donde quiera que vaya.
En cuanto al lugar del operador, es suficiente para él tener una computadora portátil y una toma de corriente a la mano.
Beneficio prácticoKiki a veces se llama un robot de telepresencia. Pero estas no son todas las capacidades del robot. El robot de telepresencia es necesario para transmitir la imagen y la voz, así como para transmitir la voz del operador a quienes están al lado del robot. Kiki es fundamentalmente diferente en que puede funcionar de forma independiente: moverse según una ruta determinada, responder a obstáculos, responder preguntas, mostrar presentaciones o videos en la pantalla incorporada. Es decir, el robot de Kiki está diseñado para la comunicación, publicidad e interacción. Esto es marcadamente diferente de todos los otros robots.
Cómo ganar dinero con un robotResultó que tal robot puede ser una buena herramienta para ganar. En muchas ciudades de Rusia y países vecinos, ya es posible alquilar un robot o comprarlo para su organización. Y si antes la anfitriona ofrecía banquetes
(con concursos interesantes), ahora los robots alquilados no están inactivos en absoluto. Por lo tanto, cada vez más se le pregunta al fabricante sobre la expansión de la red de distribuidores, y nuevos propietarios emprendedores en diferentes ciudades están escribiendo a la cola de las personas que desean alquilar un robot Kiki por un día o dos.
ConclusiónAl final resultó que, durante la exposición, se acerca periódicamente al robot y se le pide que venga a visitarlo: para un cumpleaños, abrir una tienda o celebrar un banquete y, a veces, incluso para una boda. Es decir, Kiki atrae tanto la atención y no se aleja con su comunicación, que muchos se alegrarán por la presencia de tal robot en eventos importantes en la vida. ¿Quizás esta es la introducción gradual de robots humanos en nuestras vidas? Espera y mira.
Puedes alquilar un robot o comprar una casa
aquí .