Todos están familiarizados con el sistema Raspberry Pi, que legítimamente ha ganado reconocimiento, no solo de la fraternidad profesional, sino también de los singles hechos a sí mismos. Ahora hablaremos de otro proyecto interesante en el campo de la robótica.
Veterobot es un pequeño robot todo terreno cuya característica especial es la apertura de la tecnología y el software de fabricación.

Un robot pequeño y ordenado está literalmente repleto de sensores y tiene una unidad de procesador bastante potente. El núcleo de este último es la computadora de a bordo BeagleBoard-xM. Este es un sistema abierto con procesador ARM de Texas Instruments. Su potencia es suficiente para controlar periféricos, ejecutar algoritmos complejos e incluso comprimir video en formato H-264 en tiempo real (usando DSP). Esto último es muy necesario en vista del hecho de que a bordo del dispositivo hay dos cámaras de video que pueden usarse para controlar el movimiento.
En general, el llenado del robot inicialmente ya tiene cuatro telémetros ultrasónicos, una brújula digital, GPS y cámaras de video. La administración se puede realizar a través de WLAN o 3G (mientras está en modo de prueba), y también existe la posibilidad de controlar de forma remota el robot a través de Internet (para esto solo necesita cámaras incorporadas).
Todos los componentes del dispositivo están abiertos y accesibles para todos los interesados. Por lo tanto, las capacidades de este robot están limitadas solo por la imaginación del usuario.
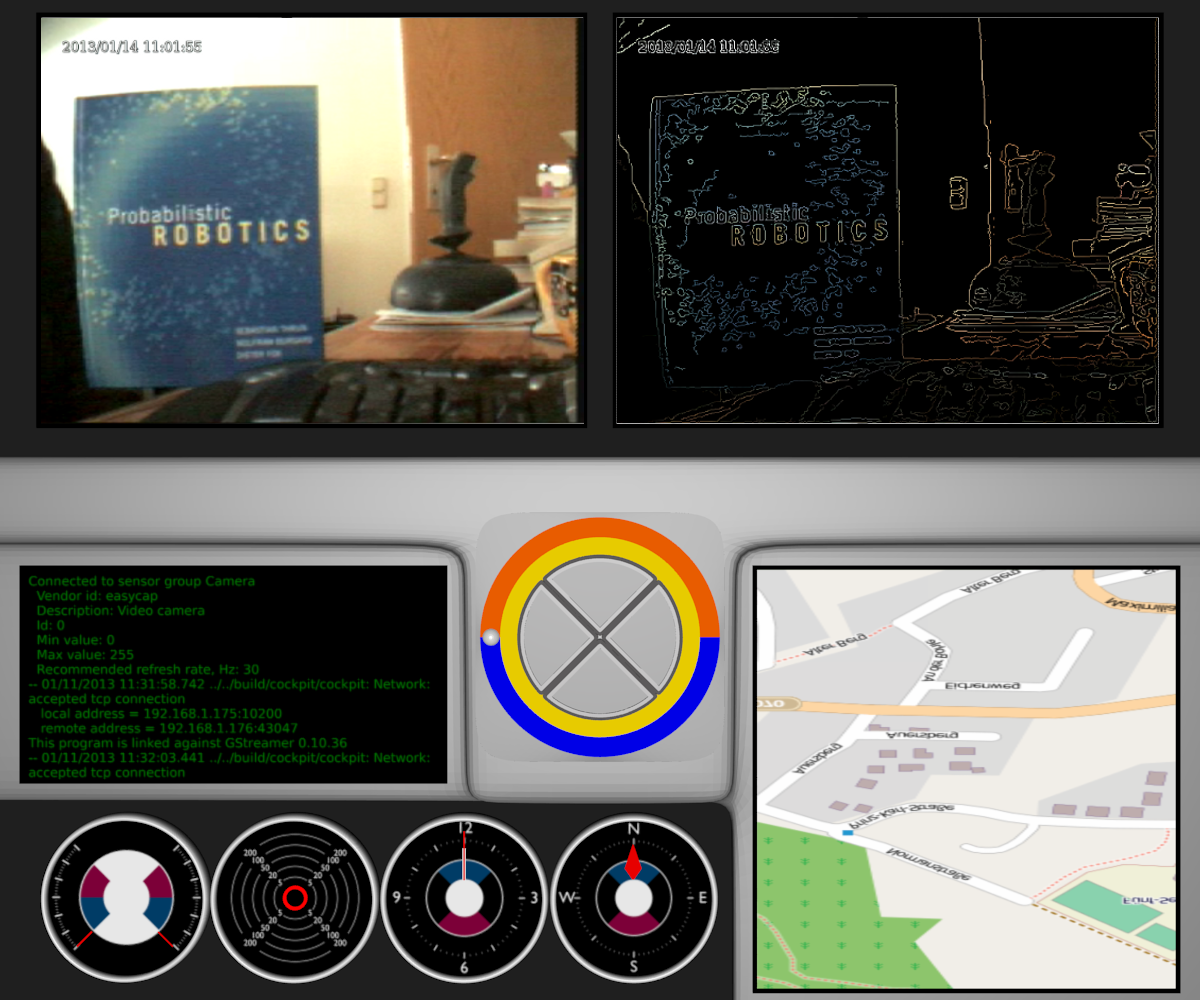
El software de relleno del robot consiste en una mezcla de Angstrom Linux, Xenomai, ZeroC's Ice y otros componentes. También se incluye un programa especial que le permite controlar el dispositivo y controlar las lecturas de los sensores. Su ventana de trabajo está en la captura de pantalla a continuación.
La tecnología de impresión tridimensional se utiliza para crear el caso de Veterobot, y los modelos mismos se ejecutaron en el programa Blender. Una excepción es el chasis Dagu Rover 5 terminado, que está equipado con dos motores con sensores de ángulo. Pero es probable que otros componentes puedan estar conectados al dispositivo. Al menos en la
presentación 3D del robot existe la posibilidad de cambiar el chasis, aunque no encontré la mención de esto en el sitio. La aplicación en sí también se realizó utilizando el motor 3D gratuito Blend4Web (la presentación se abre en un navegador web y usa WebGL), y las fuentes se encuentran en el grupo general del proyecto.

Como resultado, obtuvimos un dispositivo interesante que a los investigadores o entusiastas de la robótica les puede gustar. Aunque el costo del dispositivo es bastante alto, sus componentes, esquemas, modelos 3D, etc. están disponibles para descargar en el repositorio de
git-hub , y el sitio en sí tiene instrucciones para el autoensamblaje.
PD: El autor del artículo no tiene nada que ver con los desarrolladores del dispositivo.