Los endoscopios flexibles están diseñados para subir a los lugares más inaccesibles del cuerpo humano. No por curiosidad, sino por el beneficio del paciente. Pero no importa lo que el cirujano vea usando un endoscopio, no puede extraerlo ni cortarlo con el mismo endoscopio. Por lo tanto, tienes que ir del otro lado, tanto en sentido literal como figurado, subiendo al cuerpo humano a través de cortes en su cuerpo.
Un grupo de científicos de Harvard decidió combinar el endoscopio con un brazo robótico para poder realizar operaciones directamente "en su lugar", por así decirlo. El manipulador tiene varios modos de libertad, así como la capacidad de eliminar ciertos objetos o tejidos. El manipulador se esconde en el endoscopio mientras camina hacia el objetivo. Y tan pronto como se alcanza el lugar correcto, llega el papel del roboruk.
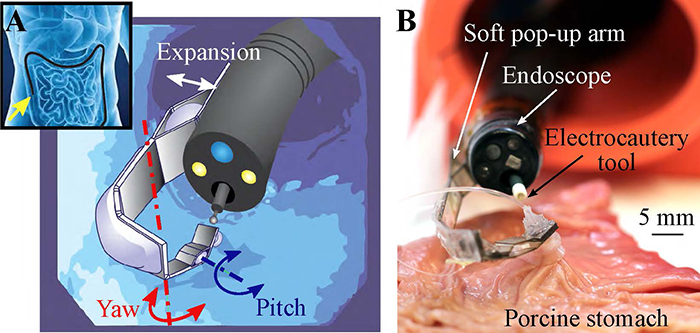 Ilustración para la descripción del concepto del manipulador y una fotografía del brazo del robot. A la derecha, el manipulador realiza una operación directamente en el tracto gastrointestinal. Estas son solo "pruebas de campo", pero aún se ven impresionantes.
Ilustración para la descripción del concepto del manipulador y una fotografía del brazo del robot. A la derecha, el manipulador realiza una operación directamente en el tracto gastrointestinal. Estas son solo "pruebas de campo", pero aún se ven impresionantes.En términos generales, los robots blandos encuentran su aplicación en muchas ramas de la ciencia, la tecnología y la medicina. Las características de su diseño son tales que un médico (después de todo, estamos hablando de médicos) puede usarlos con un alto grado de eficiencia dentro del cuerpo humano. Es cierto que las capacidades de los robots son limitadas.
“A nivel milimétrico, los dispositivos blandos realmente se vuelven blandos, de modo que no pueden dañar algún tipo de tela, pero tampoco pueden realizar operaciones con esta tela. Esto limita la aplicación de microsistemas blandos para el trabajo médico. La pregunta es si podemos crear robots blandos que puedan desarrollar esfuerzos suficientes sin poner en peligro la seguridad ”, comentó Tomazzo Rantsani, uno de los desarrolladores del proyecto.
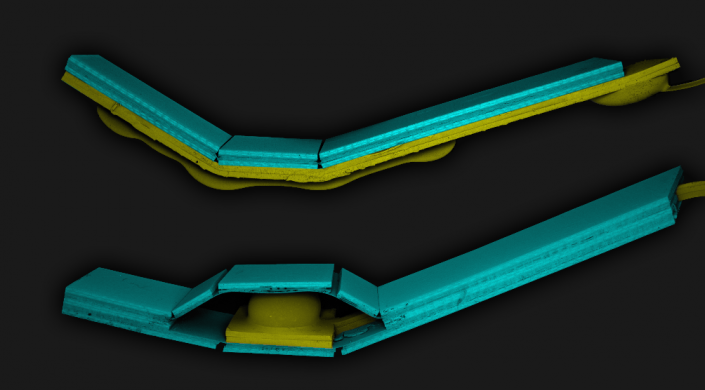
El equipo logró crear un modelo de trabajo del manipulador utilizando un "esqueleto" suficientemente fuerte y elástico rodeado de materiales blandos. Los científicos dicen que al crear su roborouki se guiaron por los principios de crear origami: figuras de papel. Como se mencionó anteriormente, el manipulador puede llegar a la meta, allí toma una forma completamente diferente, empujando, de hecho, el manipulador. Después de eso, el cirujano puede realizar las operaciones que necesita.
Para poner en marcha todo el sistema, los científicos decidieron usar actuadores que funcionan en el agua. Se conectan a los componentes fuertes del esqueleto mediante enlaces químicos, por lo que no se necesitan sujetadores adhesivos adicionales (u otros tipos de sujetadores). Hay un manipulador y una ventosa en la lista de herramientas, que funciona según el mismo principio que los retoños de los cefalópodos. Los científicos realizaron una operación de prueba en un esófago artificial utilizando tejido de cerdo. El experimento fue exitoso, el manipulador, sin dañar el delicado tejido, realizó la operación, todo se hizo de la mejor manera posible.
La última versión del manipulador pudo realizar operaciones con objetos en miniatura, cuyo tamaño no excede varios milímetros. Además de otros elementos, el roboruk está equipado con un sensor de retroalimentación para que el cirujano, al realizar una operación o examen del paciente, pueda tener una idea del esfuerzo requerido para realizar cualquier procedimiento. Y esta puede ser una de las condiciones para una operación exitosa.
En el futuro, los especialistas planean llevar a cabo la operación ya en condiciones reales, pero probablemente no en una persona, sino en un animal. "Nuestra tecnología nos permite desarrollar robots blandos de pequeño tamaño que se necesitan en medicina".
Los robots blandos son necesarios no solo en medicina, sino también en producción. Más recientemente, científicos de la Universidad Científica y Técnica de China
mostraron un manipulador neumático suave que se parece a una oruga. Por cierto, este sistema también se desarrolló en colaboración con científicos de Harvard.
Este tipo de robot puede capturar y transportar varios objetos, incluso pesados, seguir el puntero y realizar otras tareas. En el futuro, los chinos planean entrenar a su robot no solo para capturar, sino también para usar herramientas, transfiriéndolas a cierta distancia.