El primer sistema UKB de navegación acústica subacuática doméstica disponible comercialmente
No perdemos el ritmo. Desde la publicación de nuestro artículo anterior,
GPS subacuático: la continuación ha sido casi un verano, y hoy les contaré lo que hicimos todo este tiempo.
En el primer artículo sobre nuestro
GPS subacuático, hicimos una breve revisión de los sistemas de posicionamiento existentes y la acústica subacuática en particular.
Debajo del corte, hablaré sobre cómo hicimos un sistema de base ultracorta.
Entonces, en el año 2015, prometimos participar en sistemas UCB (USBL - línea de base ultracorta). La esencia de estos sistemas es la presencia de una fuente de señal (transpondedor de baliza, por ejemplo) y una antena que determina la dirección de llegada de la señal. Matriz escalonada o simplemente: antena de dirección.
Muchos de nuestros usuarios de una forma u otra hablaron sobre los inconvenientes relativos del procedimiento de colocación del flotador, y que las coordenadas se resuelven "a continuación" (como en nuestro GPS subacuático).
A veces,
siempre desea sujetar una baliza a un objeto posicionado (un buzo o TNPA / ANPA) y determinar la ubicación en relación con el punto de control de la superficie (bote, muelle, etc.) bajando la antena USBL al agua. En términos de facilidad de implementación, es el sistema más conveniente y simple. Por ejemplo, el MicronNAV mencionado en nuestro primer artículo es un sistema USBL típico, así como
este . El infame y fabuloso NaviMate, en teoría, también fue planeado como un sistema UKB: una boya flotante debería dirigir a los buzos, calcular su ubicación absoluta y devolvérsela.
Dirección encontrar antena es bastante común. Por ejemplo, los submarinos tienen conjuntos de antenas conformales que contienen miles de transductores individuales. Por supuesto, no se puede decir que nadie haya hecho sistemas UKB antes que nosotros en Rusia. Sin embargo, hasta donde sabemos, el nuestro es el primer sistema doméstico disponible comercialmente (¡y generalmente el más económico!).
Pero nada en este universo es gratis. Por conveniencia hay que pagar. Según nuestro colega, que desarrolló el algoritmo de operación del sistema de búsqueda de dirección y es el autor del firmware de la antena de búsqueda de dirección:
"El usuario de UXB disfrutará de la facilidad de implementación ... Los primeros 10-15 minutos. Tanto como se requeriría para la colocación de boyas de un sistema de base larga en el área del agua ".
El hecho es que un error al estimar el tiempo de llegada en 1-2 metros en un sistema de base larga no hará mucho tiempo, ya que ± 1 metro es un error perfectamente admisible en las tareas de posicionamiento de buzos o robots.
El error en la definición del rayo "primero" o "directo", en el caso del sistema UHF, conducirá a la determinación de la dirección de llegada de alguna reflexión (o la suma de las reflexiones - "rayos"), pero puede venir de cualquier parte, todo depende del área específica del agua. Esto afecta especialmente la determinación del ángulo vertical. Capture un reflejo desde la superficie o desde la parte inferior y ahora tiene un rango de valores en el rango de 90 grados, y este es un sistema de navegación regular.
En los sistemas modernos (y el nuestro también) el ángulo vertical no se tiene en cuenta. En cambio, la baliza del transpondedor tiene un sensor de profundidad incorporado y puede transmitir su profundidad a pedido de la antena de búsqueda de dirección. Además, conociendo la diferencia en las profundidades y el rango de inclinación, la distancia a lo largo de la superficie se determina trivialmente a partir del teorema de Pitágoras.
Además, la tarea de colocar la antena en sí es independiente. Al ser bajado en un cable desde un recipiente de soporte o desde un muelle, cuelga y se retuerce en olas y corrientes. En consecuencia, si el ángulo de llegada de la señal se determina en el sistema de coordenadas de la antena, y es inestable, entonces esta inestabilidad pasa a la ubicación calculada del objeto posicionado.
A menudo, para evitar tales problemas, la antena está montada en un poste. Hacemos esto también, aunque nuestra antena tiene un AHRS integrado.
Llamamos a nuestro sistema Zima.
en un futuro próximo planeamos lanzar una versión mejorada llamada Zima blizkoNuestro sistema consta de la antena transceptora Zima-B (ase) con la mayoría de los buscadores de dirección. Se puede ver en la foto de abajo.
 Figura 1 - Zima-B - antena de búsqueda de dirección montada en una varilla
Figura 1 - Zima-B - antena de búsqueda de dirección montada en una varillaY los respondedores de balizas Zima-R (esponja), que pueden ser independientes, equipados con una batería (como en la foto) e interconectados con el operador.
En este caso, el usuario pone a disposición todas nuestras innovaciones y servicios:
- la capacidad de transmitir hasta 32 comandos de telecontrol
- medición mutua de la distancia a la antena de dirección
- transferencia de acimut a la estación base (si hay un dispositivo en los medios que determina la dirección hacia el norte - una brújula en la gente común)
La baliza del transpondedor tiene el mismo factor de forma que nuestro receptor GPS subacuático, RedNODE. Como ya se mencionó, tiene un sensor de presión / temperatura incorporado para un rango de 0-30 bar y permite obtener una precisión de hasta 0.05 m de profundidad y hasta 0.1 grados de temperatura. La antena, por cierto, también está equipada con el mismo sensor, porque de alguna manera no es innovador medir la profundidad por cable.
 Figura 2 - Zima-R - transpondedor de baliza (con batería)
Figura 2 - Zima-R - transpondedor de baliza (con batería)Realizamos las pruebas generales del sistema el 3 de agosto de este año en el río Pichuga en la región de Volgogrado, cerca del lugar donde desemboca en el embalse de Volgogrado. Este es nuestro "campo de entrenamiento" favorito, conocemos todos los hoyos y elementos de perfil en persona.
A finales de julio y principios de agosto, el clima suele ser muy caluroso. Aparece una capa superior calentada en los depósitos (se produce una
termoclina ), el agua comienza a florecer, en general, las condiciones se vuelven difíciles. Solo en tal y necesidad de probar el equipo. Después de todo, a nadie le interesan las características que obtuvo en una piscina de medición perfectamente ahogada, todos trabajan en cuerpos de agua reales.
Foto del momento de trabajo para la atmósfera:
 Figura 3: Director de ingeniería, Jefe de diseño de sistemas USBL, Director de I + D (de izquierda a derecha) =)
Figura 3: Director de ingeniería, Jefe de diseño de sistemas USBL, Director de I + D (de izquierda a derecha) =)Una antena puede funcionar con 23 transpondedores (aunque para mí es difícil imaginar tal tarea, pero aún así). Las balizas están separadas por código, y el trabajo con cada una de ellas ocurre secuencialmente.
La siguiente imagen muestra una captura de pantalla del host (software de control remoto):
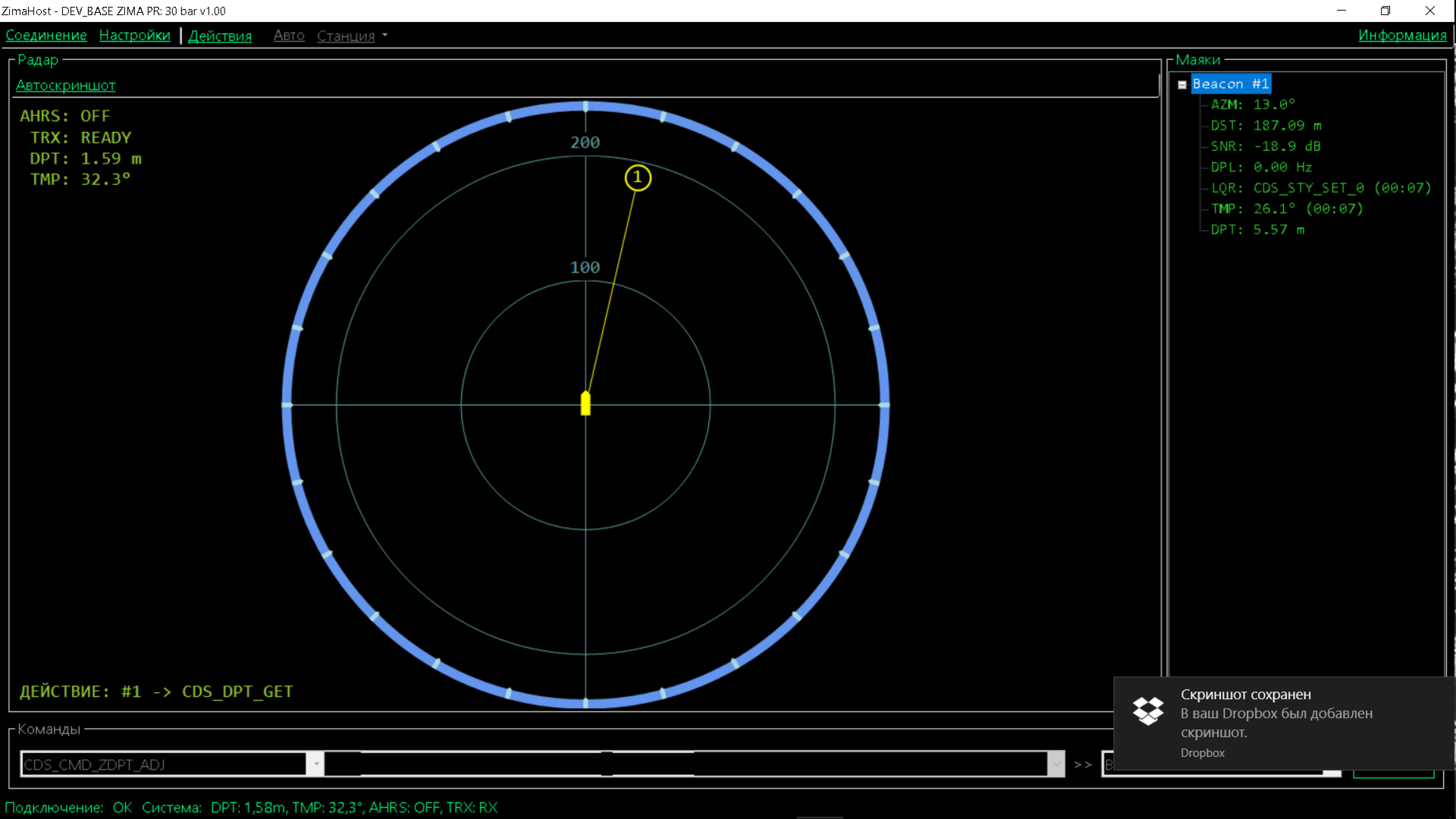
Figura 4: captura de pantalla del host Zima USBL
La antena está conectada a la PC a través del adaptador UART-USB. Por tradición, utilizamos el protocolo NMEA0183 (abierto) y todos los códigos fuente de los hosts están abiertos en
github .
Tenga en cuenta: la captura de pantalla muestra que el faro está a una profundidad de 5.5 metros, la temperatura del agua en su sensor es de 26.1 ° C (!), Y en la antena, que cuelga a un metro y medio de la superficie, está a 32.3 ° C (CARL!), A La profundidad del lugar en esta área es de unos 15-20 metros.
Desde configuraciones externas, el sistema solo necesita salinidad (a partir de la cual la velocidad del sonido está determinada por las lecturas de profundidad y temperatura) y la distancia máxima (el tiempo de espera máximo para la respuesta de la baliza se calcula a partir de ella). Según nuestro método (para el cual hay una patente pendiente), el faro también puede determinar la distancia a la antena y admite la función de establecer remotamente la salinidad del agua desde la estación base.
Y finalmente, lo más valioso que obtuvimos en este experimento (excepto el bronceado) es un video de 7 minutos (captura de pantalla) del host:
ZimaHost - videoPermítanme explicar que el faro estaba inmóvil, estirado entre el ancla y la boya, y la antena montada en la barra colgaba del costado del bote (de goma). Relatividad de movimiento, por así decirlo, en persona: el faro da una vuelta rápida de honor con un radio de más de 100 metros, que en realidad es causado por la rotación del barco y, en consecuencia, la antena.
Siempre tenemos algo que contar. Si algo parecía incomprensible o mal revelado, bienvenido en el comentario. Mis colegas y yo resolveremos las cosas.
PD: En estas pruebas, probamos no solo el sistema Zima, sino también varios otros dispositivos interesantes, sobre los que intentaré escribir lo antes posible.
Esperando por ti
- La voz del presidente después de 700 metros de cianobacterias
- caso para llamar a buzos
- imagen de acertijo (¡ahora mismo!)
Intenta adivinar en la foto qué tipo de dispositivo es y por qué es necesario: