La tecnología antigua inspiró la creación de un futuro vehículo todo terreno capaz de operar a 500 ° C durante años.
El tiempo más largo que la nave espacial podría aguantar en la superficie de Venus es de 127 minutos. El 1 de marzo de 1982, la sonda soviética
Venus-13 descendió perfectamente en paracaídas y pudo funcionar durante un poco más de dos horas debido al hecho de que todos los componentes de la computadora estaban ocultos en una carcasa de titanio sellada, previamente enfriada en órbita. La temperatura en la superficie de Venus promedia 464 ° C; es más alta que en la superficie de Mercurio (el planeta más cercano al Sol) y lo suficientemente caliente como para que la electrónica convencional no pueda funcionar.
No solo la temperatura hace de Venus un lugar desagradable para las computadoras: la presión en la superficie es de 90 atmósferas, lo que equivale a la presión a una profundidad de 900 m en el océano. Y si tiene la seguridad de que las lluvias de ácido sulfúrico que se originan en las partes superiores de la atmósfera de Venus no alcanzan la superficie, entonces sepa que está tan oscuro allí (como en el día más nublado de la Tierra) que la extracción de energía solar será extremadamente ineficiente.
 Fotos de la superficie de la sonda soviética "Venus-13", descendieron a Venus y trabajaron allí un poco más de dos horas
Fotos de la superficie de la sonda soviética "Venus-13", descendieron a Venus y trabajaron allí un poco más de dos horasLa atmósfera cargada que hace que la superficie de Venus sea tan desagradable hace un trabajo horrible al minimizar la cantidad de datos de superficie que podemos recopilar mientras estamos en órbita, por lo que sería realmente muy bueno si hubiera un robot allí abajo que nos buscara todo. La mayoría de las ideas relacionadas con el estudio de la superficie de Venus están en la misma línea que las sondas soviéticas: coloque la electrónica dentro de un contenedor aislado conectado a un sistema de aire acondicionado increíblemente potente y probablemente alimentado por un motor radiactivo Stirling con plutonio como combustible. . La investigación y el desarrollo de dicho sistema costará miles de millones.
El enfoque tradicional de un vehículo todo terreno para Venus es difícil, costoso y peligroso. Pero un equipo de ingenieros del Laboratorio de Propulsión a Chorro de la NASA, JPL, ubicado en Pasadena, PA. A California se le ocurrió una idea innovadora para estudiar la superficie de Venus. Si el problema está en la electrónica, ¿por qué no deshacerse de él y crear un vehículo mecánico todo terreno?
Con fondos del programa Conceptos de Innovación Avanzada (NIAC) de la NASA, el equipo de JPL quiere saber si es posible construir un vehículo todo terreno para explorar Venus sin sensores, computadoras y fuentes de alimentación tradicionales. Un Automaton Rover para entornos extremos, AREE] podría usar engranajes de reloj, resortes y otros mecanismos para proporcionar la mayor parte de la funcionalidad del vehículo, incluida la energía, el almacenamiento de energía, la detección, el movimiento y las comunicaciones, sin ningún dispositivo electrónico. Calentar
 Indicador de ubicación dentro del globo utilizado en la nave espacial Voskhod
Indicador de ubicación dentro del globo utilizado en la nave espacial VoskhodEn un mundo electrónico sobrecargado, la mayoría de nosotros no entendemos qué se puede hacer con las computadoras mecánicas. Hace dos mil años, más o menos un siglo, los antiguos griegos construyeron el
mecanismo Antikythera , capaz de calcular la posición del Sol y la Luna, mostrar las fases de la Luna, predecir eclipses, rastrear ciclos de calendario y probablemente mostrar la posición de cinco planetas usando un conjunto de 30 bronces calibrados con precisión. engranaje accionado por un eje con un mango.
Entre los siglos XVII y XIX, Blaise Pascal, Gottfried Leibniz y Charles Bebbage desarrollaron computadoras mecánicas capaces de realizar varios cálculos aritméticos. Más cerca de los tiempos modernos, en la década de 1940, las computadoras mecánicas se usaban activamente para fines prácticos tan duros como manejar el fuego de artillería y lanzar bombas.
Los rusos usaron la
computadora mecánica Globus para calcular la ubicación de su nave espacial hasta 2002, pero en general, todo se está haciendo en electrónica. Y está bien, pero no en Venus, donde el uso de la mayoría de los dispositivos electrónicos no será práctico.
El concepto JPL para AREE es crear un robot con un conjunto mínimo de componentes electrónicos y, en su mayor parte, confiar en sistemas mecánicos que puedan funcionar con altas temperaturas durante semanas, meses o incluso años sin problemas. Jonathan Sauder es tecnólogo e ingeniero en mecatrónica en el grupo de introducción de tecnología en JPL, y el jefe del proyecto AREE. Hablamos con él para comprender mejor cómo comenzó este proyecto y cómo funcionará todo.
¿Cómo se te ocurrió la idea de AREE?
Jonathan Sauder: Nos sentamos con un grupo de ingenieros y trabajamos en una reunión de desarrollo concurrente. Durante una de las pausas para el café, hablamos sobre mecanismos y componentes geniales, y lo genial que sería hacer una nave espacial completamente mecánica, cómo se vería y dónde podría usarse. Nos dimos cuenta de que sería significativo usar algo como esto en dos lugares donde la electrónica no sobrevivirá: uno es Venus, ya que el más largo que podríamos sobrevivir en la superficie de Venus es dos horas, y el segundo es Júpiter, debido al entorno radiactivo entorno que interrumpe el funcionamiento de la electrónica.
¿Es posible construir un vehículo todo terreno robótico sin electrónica?
En la fase I del proyecto NIAC, propusimos nuestra idea de construir un vehículo todoterreno completamente mecánico que no utilice electricidad o electrónica, y reemplazar todos los subsistemas electrónicos estándar con computadoras mecánicas. Comenzando a estudiar este problema, nos dimos cuenta de que no podemos construir un vehículo tradicional todo terreno como Curiosity con un procesador centralizado. Necesitábamos concentrarnos en una arquitectura más distribuida, en la cual en un dispositivo hay muchos mecanismos simples que lo controlan, lo señalan y le dicen a dónde ir.
Al principio, queríamos llevar a cabo una serie de mediciones científicas utilizando la mecánica. Comenzamos a tratar este problema y nos dimos cuenta de que no podíamos producir datos con suficiente precisión para crear imágenes o medir parámetros como la temperatura y la presión. Existen varias opciones para la electrónica de alta temperatura, basada en carburo de silicio y galio, que funcionan a altas temperaturas. El problema es que son muy difíciles de integrar. Resultó que con su ayuda es imposible organizar un sistema eléctrico tradicional, y no se puede hacer nada que al menos se acerque a los requisitos necesarios para crear un vehículo todo terreno. Por lo tanto, decidimos crear una plataforma móvil capaz de moverse, explorar nuevos lugares y poder trabajar mucho más tiempo que los sistemas existentes.
 Concepto AREE temprano con patas
Concepto AREE temprano con patas¿Qué inició el desarrollo de AREE?
El objetivo principal es crear la arquitectura móvil de la mayor fiabilidad posible. Y ya el segundo objetivo es utilizar tantos mecanismos simples y distribuidos que puedan responder a las influencias externas que pueden dirigir un vehículo todo terreno a lo largo de la superficie de Venus. Tenga en cuenta que en las primeras imágenes, el vehículo todo terreno era muy similar al Strandbeest: los "animales que caminan" de
Theo Jansen , esculturas cinéticas que caminaban por las playas de los Países Bajos. Strandbeest funciona con un par de sensores simples que controlan el movimiento de las piernas hacia adelante o hacia atrás, y una lógica incorporada para ayudar a evitar la arena y el agua blandas.
En las primeras etapas de desarrollo del concepto, trabajamos directamente con Jansen: vino a JPL para una colaboración de dos días, y obtuvimos de él la experiencia adquirida durante 30 años trabajando con Strandbeest. Uno de sus primeros consejos fue renunciar a las piernas. Y, ya sabes, cuando la persona que creó Strandbeest te dice que un vehículo todo terreno en Venus no necesita piernas, significa que realmente necesitas encontrar otra cosa. El problema clave es que las piernas que funcionan perfectamente en playas planas y suaves se vuelven inestables cuando las mueves a una superficie más diversa, como un entorno venusiano desconocido, lo que aumenta la probabilidad de un golpe y daño al vehículo todo terreno.
Como resultado, nuestra arquitectura pasó de la fase I a la fase II, de un vehículo todo terreno de aspecto atractivo con patas a una versión menos fría, pero más confiable y práctica de un vehículo todo terreno que parece un tanque de la Primera Guerra Mundial.
 Concepto de fase II, con pistas y una turbina eólica integrada. Con un posible golpe, el vehículo todo terreno aún puede moverse.
Concepto de fase II, con pistas y una turbina eólica integrada. Con un posible golpe, el vehículo todo terreno aún puede moverse.¿Puedes describir cómo AREE puede moverse en la superficie de Venus?
Desarrollamos sistemas especializados para evitar obstáculos y determinar la cantidad de energía requerida para el movimiento, en lugar del sistema centralizado habitual que permite que el vehículo todo terreno realice varios procesos o reconfigure el vehículo todo terreno utilizando un software.
Estamos tratando de simplificar estos mecanismos tanto como sea posible para que todos realicen su tarea específica, pero la realicen bien. Quizás la colisión del vehículo todo terreno con el objeto arrojará la palanca, lo que hará que retroceda un poco, gire 90º y vuelva a avanzar. Solo podemos tener un sistema para evitar obstáculos, pero dicha acción puede repetirse muchas veces y, como resultado, puede usarse para sortear un obstáculo.
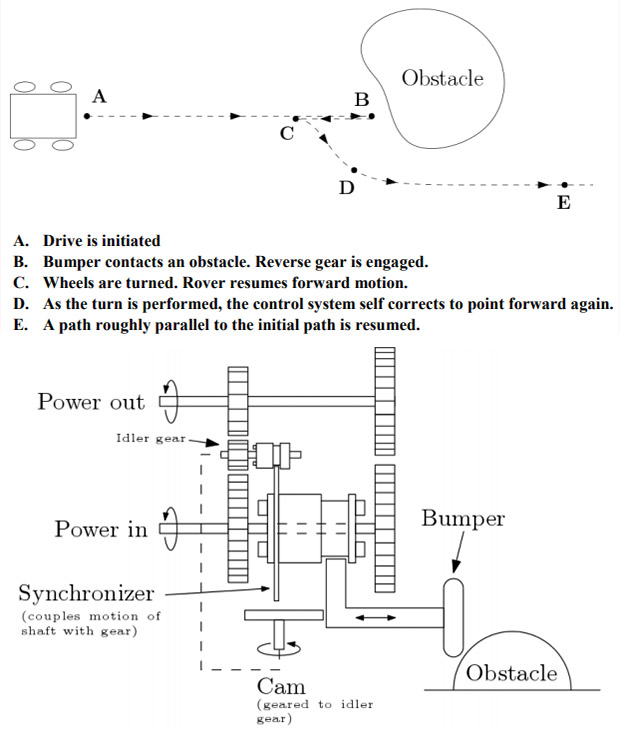
El sistema para evitar obstáculos utiliza un parachoques, engranajes con engranajes y un excéntrico. Ella puede retraer el vehículo todo terreno después de devolver el golpe, y luego volver a enganchar el parachoques y cambiar de marcha, y continuar avanzando. Durante el movimiento normal hacia adelante, la fuerza se transmite desde el eje de entrada a través de engranajes en el lado derecho del diagrama al eje de salida. Los engranajes restantes rotarán libremente. Cuando se enfrenta a un obstáculo, el sincronizador activa una marcha atrás, lo que conduce al efecto contrario. Después de que la leva esté completamente girada, moverá el parachoques a la posición delantera. Se puede usar el mismo excéntrico para girar las ruedas del vehículo todo terreno en marcha atrás del motor.
¿Qué características de AREE son únicas en comparación con otros proyectos de vehículos todoterreno de Venus?
Hoy en día, hay varios conceptos de misiones venusianas, cada una de las cuales costará una cantidad comparable a la curiosidad de Marte, y ofrece un aterrizaje en uno o dos lugares. La mayoría de las propuestas son muy complejas y están diseñadas para funcionar de 2 a 24 horas en la superficie. Planeamos trabajar durante un mes, y aquí es donde funciona nuestra innovación clave: la capacidad de explorar muchos lugares en la superficie de Venus y comprender cómo cambia con el tiempo.
¿Puedes describir cómo el AREE perfecto se ajustará a tus expectativas?
Un robot ideal podrá trabajar en las superficies más difíciles de Venus, llamadas
tessers , que son lava gruesa y pedregosa, en la parte superior similar al parquet o al azulejo. Nuestro objetivo es conducir un vehículo todo terreno en tal superficie, para tomar muestras geológicas que contribuyan a nuestra comprensión de la evolución de Venus. Un vehículo todo terreno ideal debe tener un tamaño de poco más de 1,5 m, ahora esta restricción está impuesta por un escudo térmico. Si pudiéramos, lo aumentaríamos a 2.5 m para que pudiera superar obstáculos más grandes y recibir más energía del viento.
Como resultado, debe hacer un vehículo todo terreno que pueda superar la mayoría de los obstáculos, que se arrastraría y arrastraría hacia adelante, lenta pero segura, para recolectar muestras y datos meteorológicos.
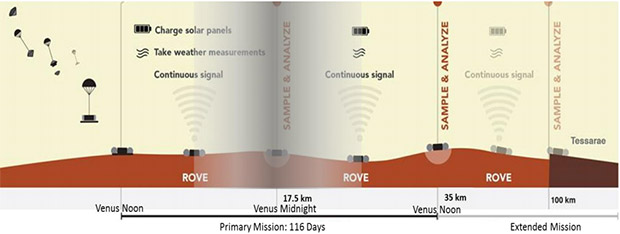 El concepto de viajar a través de las llanuras hacia Tesser. Durante la parte principal de la misión, que dura 116 días terrestres (un ciclo diario venusiano), el vehículo todo terreno cubrirá 35 km. La misión ampliada le permitirá cubrir una distancia de hasta 100 km en tres años.
El concepto de viajar a través de las llanuras hacia Tesser. Durante la parte principal de la misión, que dura 116 días terrestres (un ciclo diario venusiano), el vehículo todo terreno cubrirá 35 km. La misión ampliada le permitirá cubrir una distancia de hasta 100 km en tres años.* * *
En este punto, es posible que ya empiece a preguntarse: ¿por qué enviaríamos un vehículo todo terreno maravilloso para estudiar la superficie de Venus, si no podemos recibir noticias de él, porque sin dispositivos electrónicos, cómo puede enviarnos datos? Hay maneras de almacenar datos mecánicamente: es bastante fácil almacenar números temporalmente, y se puede ingresar aproximadamente 1 megabyte de datos en un fonógrafo de metal. Bueno, que sigue?
Una de las ideas, no tan loca como parece a primera vista, es usar bolas de hidrógeno para elevar los registros de metal a la atmósfera superior de Venus, donde serán interceptados por un avión no tripulado a gran altitud, leerlos y transferir sus contenidos a un satélite ubicado en órbita Los investigadores también están considerando la opción de una radio con tubos electrónicos, pero aunque estas lámparas son capaces de funcionar a altas temperaturas, serán vulnerables en la atmósfera de Venus y se enfrentarán a una pérdida de estanqueidad.
Pero a los desarrolladores de AREE se les ocurrió otra idea: reflectores de radar. Se puede ver desde la órbita un reflector de radar montado en un vehículo todo terreno, y al colocar un obturador frente al reflector, será posible transmitir aproximadamente 1000 bits de información en cada pase de satélite. Al agregar varios reflectores con diferente reflectividad, así como obturadores que funcionan a diferentes frecuencias, puede transferir hasta 32 variables únicas por día. Además, en algunos casos ni siquiera será posible transmitir ciertos números; por ejemplo, al colocar un ventilador frente al reflector, será posible medir la velocidad del viento en diferentes lugares de la superficie.
Ahora, después de haber creado un vehículo todo terreno único en cuanto a capacidades y confiabilidad, capaz de sobrevivir en Venus, necesita comprender qué tipo de investigación científica puede llevar a cabo, y esta es una pregunta particularmente difícil para AREE, como se explica en la propuesta de la Fase I de la competencia NIAC:
Uno de los principales puntos débiles de un sistema puramente mecánico es el potencial de la investigación científica. Además de las comunicaciones, los instrumentos científicos sirven como un área clave donde la electrónica de alta temperatura sería útil. Las mediciones más complejas, especialmente geológicas, requieren soluciones electrónicas.
A fines del año pasado, la NASA anunció el programa HOTTech, un programa de tecnología de alta temperatura que financia "tecnología de punta para estudios automatizados de entornos de alta temperatura donde las temperaturas se acercan o superan los 500 grados Celsius". AREE espera que como resultado de HOTTech haya herramientas científicas que puedan sobrevivir en su vehículo todo terreno, pero para un resultado diferente, tienen algunas ideas interesantes para hacer ciencia sin ningún tipo de electrónica. Por ejemplo, medir la velocidad del viento usando una turbina, la temperatura y la presión usando materiales que se expanden de la temperatura, y las propiedades químicas usando barras que responden a ciertos compuestos químicos.
 La energía eólica se almacena en un resorte compuesto. El sistema mecánico en el diagrama es capaz de medir la energía almacenada en el resorte, y usa el embrague para transferir energía al sistema de movimiento cuando está suficientemente acumulado. Si desea que el vehículo todo terreno se mueva después de un cierto tiempo, o al alcanzar otras condiciones, puede agregar puertas lógicas mecánicas que respondan a relojes u otros sensores.
La energía eólica se almacena en un resorte compuesto. El sistema mecánico en el diagrama es capaz de medir la energía almacenada en el resorte, y usa el embrague para transferir energía al sistema de movimiento cuando está suficientemente acumulado. Si desea que el vehículo todo terreno se mueva después de un cierto tiempo, o al alcanzar otras condiciones, puede agregar puertas lógicas mecánicas que respondan a relojes u otros sensores.Sauder y el equipo no están tratando de crear toda esta mecánica solo por diversión. Explorar Venus en un espacio de más de un día o dos es una tarea realmente importante. "Nuestro objetivo no es reproducir lo que ya se ha hecho, o pronto será posible en el campo de la electrónica de alta temperatura", dice Sauder, "sino crear un conjunto de soluciones mecánicas para aquellas áreas en las que todavía no hay soluciones claras".
La tecnología que se desarrolla como parte del proyecto AREE puede ser útil en otros lugares del Sistema Solar, y no solo en lugares con un alto nivel de radiación, como Europa, una de las lunas de Júpiter. Aquí en la Tierra, AREE puede ser útil para recolectar muestras cerca de un volcán activo o en áreas con altos niveles de radiación. Otra ventaja de AREE es que se puede esterilizar completamente a alta temperatura sin comprometer completamente la funcionalidad. Por ejemplo, si hay un lago con alguna forma de vida inusual bajo el casquete polar de Marte, puede enviar AREE estéril para la recolección de muestras y no preocuparse por la contaminación.
Ahora AREE ha recibido fondos para la segunda fase del NIAC. El equipo está trabajando en un desarrollo más detallado del sistema de movimiento, que probablemente conduzca al reemplazo de las orugas por algunas ruedas, lo cual es más confiable. También desarrollan relojes mecánicos que pueden funcionar a altas temperaturas, una de las partes principales de una computadora mecánica autónoma. Sauder dice que esperan resultados interesantes al construir y probar un sistema de transmisión de señales de radar durante todo el año. También estamos muy interesados en esto: este es uno de los robots más innovadores que hemos visto, y no podemos esperar a ver cómo se desarrolla en Venus.
El equipo de AREE dirigido por SREE también incluye a Evan Hilgeman, Michael Johnson, Aaron Parnes, Bernie Bienstock y Jeffrey Hall [Evan Hilgemann, Michael Johnson, Aaron Parness, Bernie Bienstock, Jeffery Hall]. Jessie Kawata y Kathryn Stack son autores adicionales del informe final para la fase I.