NAP * - Periférico independiente central
Artículos anteriores sobre periféricos independientes principales Microcontroladores en fuentes de alimentación conmutadas
Parte 3
Las secciones anteriores ( Parte 1 , Parte 2 ) discutieron cómo los periféricos de microcontroladores Microchip independientes del núcleo le permiten construir controladores PWM de fuentes de alimentación conmutadas desde "ladrillos" mediante el establecimiento de conexiones entre diferentes módulos periféricos. Si agregamos nuevos "ladrillos" a los controladores PWM descritos anteriormente, obtendremos nuevas funciones. Considera qué más se puede hacer.
Automatización de funciones
Protección de la unidad de potencia
Una cuestión importante en la electrónica de potencia es la provisión de funciones de protección. Si se rompe la retroalimentación, puede haber situaciones en las que el interruptor de alimentación se abrirá por un tiempo no válido.
Los microcontroladores PIC con periféricos independientes del núcleo (CIP) tienen un temporizador con una función de límite (Hardware Limit Timer, HLT).
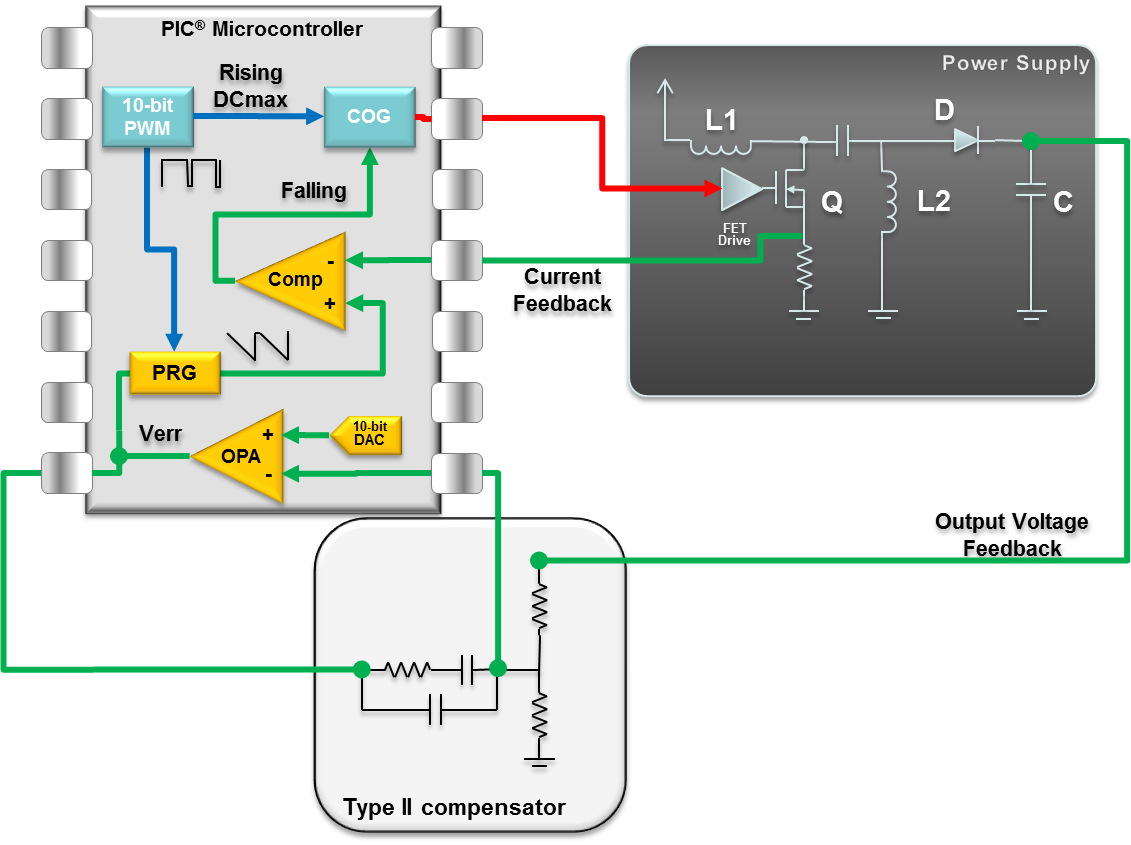
Considere un ejemplo de la implementación de un controlador PWM con protección automática (limitando el ancho del pulso de salida y la posibilidad de apagado automático).

Fig. 3.1. Controlador PWM
Temporizador HLT1: establece el límite de tiempo para el estado abierto del MOSFET; temporizador HLT2: establece el tiempo para el estado apagado de Toff.
COG - Generador de salida complementario - genera señales de control MOSFET.
Algoritmo (inicialización de la periferia del microcontrolador):
- El temporizador HLT2 inicia la inclusión de COG (es decir, MOSFET de potencia) y cockles HLT1. La corriente a través de la inductancia y el voltaje aumenta. Cuando el voltaje coincide con Vref, se activa el comparador.
- En modo normal, el comparador restablece COG, al mismo tiempo que COG, se restablece HLT2 (Toff).
- La señal del comparador queda en blanco durante algún tiempo cuando se conmuta el interruptor de alimentación, evitando así falsas alarmas que pueden ocurrir por interferencia (en la Figura 3.1, la señal de supresión está configurada para mayor claridad en el comparador, de hecho, la función de supresión es una característica del módulo COG, no lo hace recibe la señal del comparador).
La Figura 3.2 explica el funcionamiento de dicho controlador PWM.
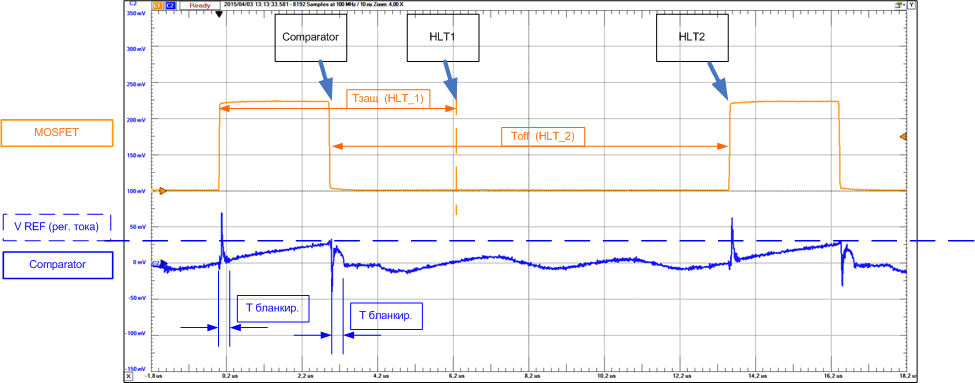
Figura 3.2. Diagramas de voltaje que explican el funcionamiento del controlador PWM (Fig. 3.1).
Si el comparador no funciona durante el tiempo de seguridad Tzt., Entonces el temporizador de límite HLT1 restablecerá el COG y limitará el tiempo de apertura del interruptor de encendido. Un tiempo de apertura más largo para la tecla puede significar retroalimentación abierta, un mal funcionamiento del transistor de potencia o inductancia.
El módulo COG tiene una función para bloquear la operación, en cuyo caso el programa puede desbloquearlo. Esto se puede usar para el diagnóstico: si HLT1 se activa constantemente, el programa puede apagar el controlador PWM y señalar un mal funcionamiento.
Arranque suave
Si la energía permanece en la inductancia durante el período PWM, durante varios períodos esto puede conducir a su saturación. Al mismo tiempo, al comienzo de la fuente, el voltaje de salida es cero y la retroalimentación de voltaje aún no funciona. Es decir Se crean condiciones para saturar la inductancia de potencia.
Se puede lograr un arranque suave en el control de voltaje aumentando la inductancia o formando un ciclo de trabajo bajo al inicio con un aumento adicional en el ciclo de trabajo.
El arranque suave en el control de corriente se puede realizar limitando la corriente del circuito de retroalimentación al iniciar la fuente.
Ejemplo: arranque suave con limitación de corriente máxima. El DAC y el comparador C2 limitan la corriente máxima mínima; el voltaje del DAC aumenta lentamente mediante programación. Cuando Vout alcanza la norma, el comparador C1 comienza a funcionar, por interrupción desde la cual puede desconectar el circuito de arranque suave y el límite de corriente (DAC + Comp2).

Fig.3.3. Controlador PWM con función de arranque suave.
Protección contra sobretensiones
Agregar un comparador C2 para analizar el voltaje de salida ayudará a apagar el módulo COG cuando el voltaje de salida aumente por encima del umbral de Sobrevoltaje (protección contra circuito abierto en la carga, vea la figura 3.4).
| Controlador sin protección | Controlador de sobretensión de salida |
|---|
 |  |
Figura 3.4
Del mismo modo, es posible organizar la protección contra el exceso de temperatura, etc.
Limitación máxima del ciclo de trabajo
Anteriormente, la implementación de dicha función se consideraba en los controladores PWM con control de voltaje, para la opción de implementación, ver Fig. 3.1.
En los controladores con control de corriente en modo normal, la salida PWM se activa por el frente de la entrada PWM (referencia) y se restablece desde la señal de retroalimentación: el comparador de corriente. Para limitar el ciclo de trabajo de los pulsos de salida, se puede utilizar un PWM de referencia, cuyo ciclo de trabajo se selecciona como máximo, para la topología IPS desarrollada. Luego, al declinar el PWM de referencia, es posible restablecer forzosamente el módulo COG (ver Fig. 3.5).

Figura 3.5. Controlador PWM con pulsos de salida de ciclo de trabajo limitado.
Acceso a señales internas y diagnósticos.
Mientras que el Kernel Independent Peripheral forma el controlador PWM de la fuente de alimentación conmutada y cierra la retroalimentación del circuito de control, el núcleo del microcontrolador permite funciones de medición, diagnóstico y comunicación. El microcontrolador puede medir el pico y la corriente promedio a través de la inductancia, una señal de compensación de diente de sierra. Junto con la medición de los parámetros de tiempo, esto permite que el núcleo del microcontrolador realice cálculos matemáticos y obtenga información que no está disponible a través de mediciones directas.
Usando el voltaje de error medido Verr, PRG e IL_min, se pueden calcular las corrientes ILpeak e IL_avg.
La medición del ciclo de trabajo y el conocimiento de IL_avg permiten calcular Iin_avg e Iout_avg. Usando Vin, Vout, Iin_avg, Iout_avg, puede evaluar el poder y la eficiencia de la fuente de energía.
Las interfaces de comunicación permiten control externo, transferencia de datos e información de diagnóstico. Los recursos de software le permiten implementar pilas de protocolos de comunicación.
Como ejemplo, el microcontrolador se puede usar en sistemas de generación de energía de fuentes alternativas con baterías de almacenamiento sin el uso de microchips especializados para convertidores de energía. Para este tipo de aplicación, la conversión de energía y la carga de la batería son controladas por un microcontrolador. Las funciones para encontrar el punto de máxima energía (MPPT) en los convertidores solares y los protocolos de comunicación se implementan en el software. La interfaz de interacción del usuario se implementa a través de los puertos de entrada / salida del microcontrolador. Por lo tanto, muchas funciones de dicho sistema pueden implementarse en un solo microcontrolador (ver Fig. 3.6), y no utilizar varios microcircuitos y MK.

Figura 3.6.
Independientemente del núcleo, los periféricos permiten una serie de otras funciones: limitar la corriente o apagar la fuente durante el sobrecalentamiento, cambiar el modo de corriente intermitente a corriente continua, etc. (manchado) del espectro de interferencia de la fuente.
La implementación de controladores PWM en la periferia MK independiente del núcleo para la implementación de una IIP de una sola etapa o de un solo canal se discutió anteriormente.
Las familias de microcontroladores PIC16F176x / 177x tienen hasta 4 conjuntos periféricos del mismo tipo, cada uno de los cuales se puede utilizar en la construcción de un convertidor de energía. Por lo tanto, los controladores de estas familias pueden ser el núcleo de los convertidores de energía y IIP multicanal o multietapa.
Programa de microcontrolador
Un IIP con implementación en un periférico independiente del núcleo prácticamente no requiere intervención del núcleo del microcontrolador. La tarea del microcontrolador se reduce a la configuración inicial de la periferia, después de lo cual las funciones / módulos funcionan de forma autónoma mediante señales de retroalimentación. El controlador puede requerir una participación mínima en el procesamiento y el cambio del algoritmo de interacción periférica, por ejemplo, durante un arranque suave, cambiando los parámetros de salida de la fuente, resolviendo condiciones de emergencia, etc.
Por lo tanto, el programa central y el microcontrolador pueden realizar una serie de sus funciones inherentes: control, proporcionar una interfaz con equipos de control, indicación de modos, etc.
En el sitio web de Microchip puede encontrar la implementación de las interfaces PMbus, DALI, DMX, que se utilizan ampliamente en varios sistemas con convertidores de energía.
Depuración
Para depurar el sistema, no es necesario comenzar con el diseño de la unidad de potencia. Para algunas tareas, los recursos y los periféricos del MC permiten formar tanto la lógica de control del convertidor como emular las señales de retroalimentación de la topología del convertidor de salida.
| topología | esquema |
|---|
 | 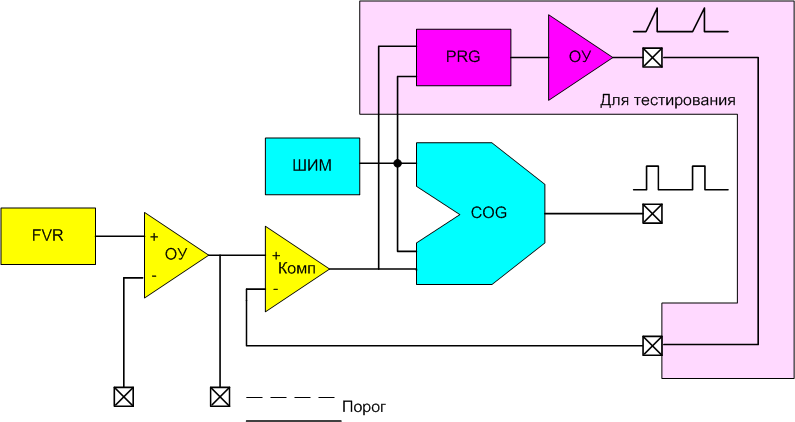 |
Figura 3.7. Un ejemplo de la formación de una señal de diente de sierra para depurar un controlador PWM con la medición del valor de corriente pico.
| esquema | tabla |
|---|
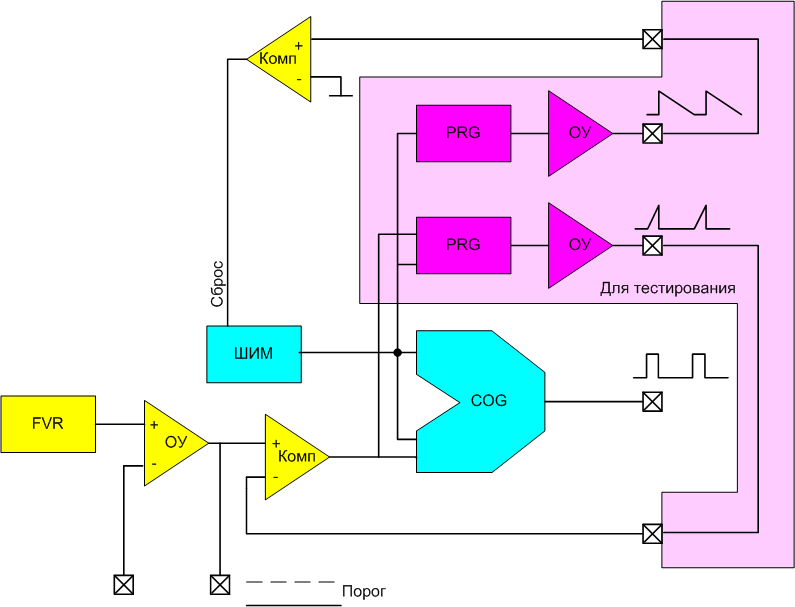 |  |
Figura 3.8. Un ejemplo de la formación de señales de diente de sierra para depurar un controlador PWM con la medición del valor máximo de la corriente y la detección de la corriente cero en la inductancia.
Resumen
La capacidad de configurar de manera flexible los periféricos permite utilizar el mismo MC de aplicación general en diversas tareas, incluida la creación de controladores PWM para convertidores de energía.
Los periféricos independientes del núcleo son interesantes en sí mismos, pero el mayor beneficio puede venir de la posibilidad de síntesis de bloques funcionales, es decir. Compartir varios módulos periféricos para resolver problemas específicos. En este caso, la velocidad del reloj, la velocidad y la profundidad de bits del núcleo quedan en el camino: la parte de hardware realiza funciones especializadas y el núcleo se dedica al soporte de software del producto.
La literatura utilizada y recomendada para el estudio:
- Sitio web de Microchip: http://www.microchip.com/promo/dspic33-gs-digital-power
- Celdas lógicas configurables en microcontroladores PIC https://geektimes.ru/post/278718/
- Microchip microcontrolador I / O puertos. https://geektimes.ru/post/279374/
- TB3119. Resumen técnico del generador de salida complementario. www.microchip.com
- Dinámica y control de sistemas electrónicos conmutados. Capítulo 2. Modulación de ancho de pulso http://www.springer.com/978-1-4471-2884-7
- TB3155. Controlador PWM intercalado multifásico con emulación de diodo mediante microcontroladores PIC de 8 bits. www.microchip.com
- TB3153. Funciones de muestra implementadas con el generador de rampa programable. www.microchip.com
- Keith Billings, Taylor Morey. MANUAL DE SUMINISTRO DE ENERGÍA DEL MODO DE INTERRUPTOR
- Marty Brown Libro de cocina de fuente de alimentación.
- AN2122. Flyback SMPS utilizando un microcontrolador como unidad de control. http://www.microchip.com
- 20097 PC7. Diseño de convertidores de potencia inteligentes con periféricos independientes centrales (CIP)
Microchip MASTERs Training 2016. - AN2456. Configurabilidad en un controlador de fuente de alimentación de modo conmutado. http://www.microchip.com