La ciencia ficción está llena de robots voladores. También hay robots humanoides voladores creados a imagen del hombre. Estas son máquinas autónomas y exoesqueletos, que se controlan desde el interior, como Iron Man. Pero en realidad, aún no hemos visto tales robots. Hay multicopter, pero no pueden caminar en el suelo, como una persona. Los ingenieros del Instituto Italiano de Tecnología decidieron corregir esta deficiencia: desarrollaron la
arquitectura del robot humanoide volador iCub con cuatro motores a reacción y un sistema de control para ello.
Este es uno de los primeros robots del mundo capaces de volar, caminar y manipular objetos, es decir, capturarlos con manipuladores.
Los robots humanoides se consideran tradicionalmente como máquinas terrestres que se mueven en la superficie. Pero los científicos italianos están seguros de que si agrega motores a reacción a un robot así, el alcance de su uso se ampliará significativamente, ya que tendrá más grados de libertad. Si se compara con los vehículos aéreos no tripulados tradicionales, a veces también están equipados con manipuladores que pueden capturar objetos, pero una vez más, un robot humanoide tiene una ventaja sobre ellos, ya que puede caminar en el suelo. Esto aumenta la fiabilidad y la eficiencia energética del sistema.
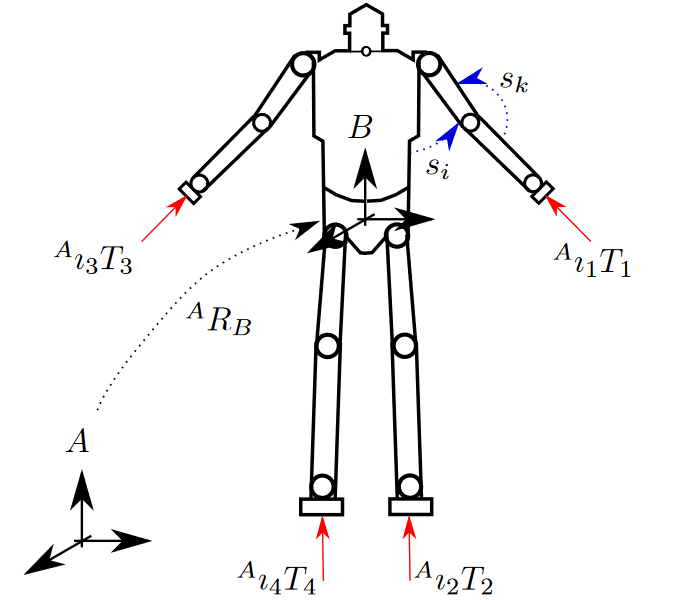
En el proyecto del Instituto Italiano de Tecnología, se instalan cuatro motores a reacción en los efectores terminales, es decir, los "brazos" y las "piernas" del robot. Esta disposición de los motores parece un poco antinatural, pero de hecho, dicho circuito multimodal ya se ha probado en otros diseños. Los ingenieros dicen que le permite estabilizar la trayectoria calculada en relación con el centro de masa, teniendo en cuenta pequeñas desviaciones en la orientación del marco de soporte del robot.
El desarrollo italiano está lejos de ser una implementación práctica. Los desarrolladores lo llaman "el primer paso para crear robots humanoides voladores" y realmente es solo el primer paso. Lo que hicieron los ingenieros fue desarrollar un marco básico para controlar la
simulación del robot iCub durante un vuelo estacionario en el aire y un movimiento suave. El empuje del motor también se calcula en el programa de simulación y se tiene en cuenta en el cálculo del sistema de control. Este trabajo demuestra que crear un robot de este tipo y controlarlo es
teóricamente posible, aunque los desarrolladores no tuvieron en cuenta los efectos aerodinámicos y otros factores que pueden manifestarse en la operación práctica del robot. Todo tendrá su tiempo: tanto esos cálculos como los primeros experimentos con vuelos reales serán más tarde, pero ahora la tarea era asegurarse de que era teóricamente posible controlar el movimiento de dicho mecanismo en el aire.
El video muestra cómo el robot se congela en un lugar y también calcula la trayectoria deseada para su centro de masa.
Uno de los desarrolladores de iCub, Daniele Pucci, le dijo a
IEEE Spectrum que tuvo la idea de crear un robot así hace cuatro años cuando se mudó a trabajar en el Instituto Italiano de Tecnología. Luego pensó en cómo aplicar sus desarrollos en el campo del control de UAV a robots con varias "partes del cuerpo", es decir, no un cuerpo completamente rígido.
Daniele Pucci cree que los robots voladores de tipo humanoide tienen muchas ventajas sobre los multicopters convencionales que están equipados con manipuladores robóticos. Estos últimos a menudo experimentan problemas en tiempo ventoso, porque no pueden pararse firmemente en el suelo y, por lo tanto, requieren un control más preciso al intentar capturar un objeto estacionario. Además, el robot humanoide tiene dos manipuladores, y no uno, lo que simplifica aún más la tarea.
Otra ventaja es social. En el futuro, tales robots pueden ser utilizados como exoesqueletos para humanos, a imagen de Iron Man. El ejemplo de
Richard Browning tirando de un exoesqueleto muestra que tales inventos serán demandados; de hecho, ¿quién de nosotros no quiere volar en una caja de hierro con motores a reacción?
 Richard Browning flotaba a un metro del suelo
Richard Browning flotaba a un metro del sueloEl artículo científico fue
publicado el 16 de febrero de 2017 en el sitio de preimpresión arXiv.org (arXiv: 1702.06075) y presentado para su publicación en la revista
IEEE Robotics and Automation Letters .