
Anteriormente en nuestras publicaciones, hemos
planteado repetidamente
el tema del uso de quadrocopters en telecomunicaciones. Varios
estudios de caso sobre este tema han aparecido en nuestro blog.
Sin embargo, hoy nos centraremos en el uso de helicópteros en la organización de redes inalámbricas. Esto se ha dicho más de una vez y recuerdo que Facebook distribuiría Internet en todo el planeta con la ayuda de drones. También planearon usar drones en el Ministerio de Emergencias, por ejemplo, al organizar cobertura de radio a corto plazo mientras se organizan varias operaciones de rescate u otros eventos. En general, en todas aquellas situaciones en las que se requiere el despliegue rápido de redes inalámbricas.
En este material, me gustaría presentar un
estudio de expertos extranjeros, que demuestra claramente los resultados de un experimento con un avión no tripulado que actúa como punto de acceso.
Acerca de la metodología y las características de los dispositivos experimentales.
La placa Intel Galileo se utilizó como elemento principal del sistema. La placa se basa en la CPU Intel Quark SoC x 1000 de 32 bits con una frecuencia de reloj de 400 MHz. El software utilizado fue Linux quark 3.19.8 yocto-standard. La fuente de alimentación es una batería de 10400 mAh, capaz de proporcionar a Galileo hasta 15 horas de duración de la batería. Se conectó una tarjeta Intel Dual Band Wireless-AC 7260 a la placa Galileo a través del puerto PCI Express. La tarjeta es capaz de proporcionar velocidades de transferencia de datos de hasta 867 Mbit / s. Funciona en varios estándares de Wi-Fi (802.11a / b / g / n / ac). Dos antenas externas con una ganancia de 5 dBi se conectaron a la tarjeta. El peso total de la placa Galileo, la batería y toda la parte de la antena fue de 340 gramos.
La primera etapa del experimento fue estudiar las capacidades teóricas de cubrir un avión no tripulado. El cálculo se realizó utilizando los modelos de propagación de radio: "Espacio libre" y el modelo "Wireless Initiative New Radio" - GANADOR D1.
Usando estos modelos, se calcularon los rangos máximos estimados de propagación para el enlace ascendente y el enlace descendente de varias versiones de Wi-Fi. Además, medimos el rendimiento de la placa Galileo como un nodo intermedio de una red Wi-Fi.
El experimento se basó en dos modos de operación de puntos de acceso inalámbrico. El primero, "Infraestructura", se implementa en la mayoría de las redes comerciales de Wi-Fi. En este modo, el punto de acceso es el nodo de comunicación central que conecta dispositivos en la red y sirve como puerta de enlace a Internet. En este modo, el punto de acceso se encarga de todas las tareas de administración de la red.
El segundo modo es Ad-Hoc. No es menos común y es una red de malla, donde ninguno de los puntos de acceso es central. Todos los nodos son iguales y cada uno asume las tareas de un host o enrutador. Los nodos ad-hoc pueden moverse para formar una red móvil llamada (Mobile Ad-hoc NETwork - MANET). La ventaja de este modo es que la conexión entre nodos se puede cambiar dinámicamente al mover dispositivos. Pero la operación efectiva de dicha red puede depender en gran medida de los algoritmos de enrutamiento responsables de entregar un paquete entre los nodos de la red. Debido a la naturaleza dinámica de la topología de la red, el "costo" de la ruta entre nodos debe recalcularse periódicamente para encontrar las mejores rutas.
Para las pruebas, se conectaron dos dispositivos adicionales a la red. Los nodos de la red eran dos computadoras portátiles con sistema operativo Linux Ubuntu y tarjeta Wi-Fi IEEE 802.11 a / b / g / n. Se instaló una computadora portátil con una tarjeta inalámbrica Intel Centrino Advance-N 6230 en el lado receptor y una computadora portátil con una tarjeta Intel Dual Band 3160 en el otro lado. La placa Intel Galileo, que funciona en modo AP (modo infraestructura), o como una de nodos intermedios (Ad-Hoc) entre el transmisor y el receptor. En el último dispositivo, se utilizó el protocolo de enrutamiento BATMAN, que ha demostrado su eficacia. Las métricas de red se obtuvieron usando iPerf3. En este experimento, se utilizó la transmisión con una velocidad constante entre los nodos de la red con los siguientes parámetros: duración de la transmisión: 30 segundos; velocidad de transferencia: 1, 3, 5, 7, 9, 11 Mbps; tamaño de paquete: 512 y 1024 bytes.
Los parámetros de una red aérea real se midieron de acuerdo con el siguiente esquema:
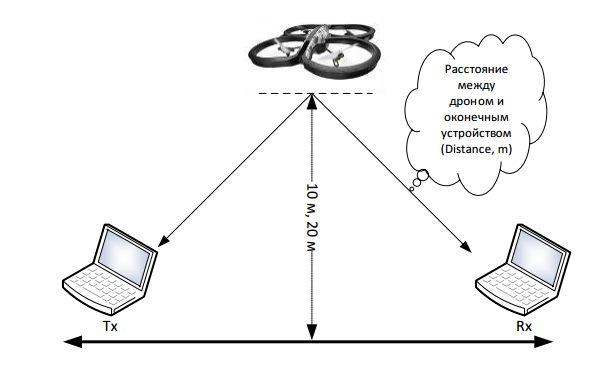
Los dos terminales se alejaron gradualmente el uno del otro a lo largo del eje X. En los puntos, el ancho de banda de la red se midió usando un analizador de red iPerf3, y el nivel máximo de señal se midió usando un analizador de espectro Rohde & Schwarz FSH3. El quadcopter colgaba a una altura de 10 y 20 metros, sobre los cuales se hicieron mediciones. Entonces el dron miró:

Radio de acción
Como notamos en el experimento, se midió el rango de comunicación y se calculó la cobertura de acuerdo con los modelos de propagación de ondas de radio "Espacio libre" y el modelo WINNER D1. La fórmula de Friis se usa cuando es necesario calcular la longitud de la señal de radio entre el transmisor y los receptores en ausencia de obstáculos entre ellos.
Este modelo se usa solo cuando se calculan campos en la zona lejana, el cálculo se realiza de acuerdo con la fórmula:

El WINNER D1 es un modelo estocástico. Tiene en cuenta las pérdidas en el canal inalámbrico. Está determinado por la fórmula:

En él, las variables de letras indefinidas tienen los siguientes valores A = 21.5, B = 44.2 y C = 20.
En los cálculos, se supuso que la potencia del transmisor para el enlace ascendente y el enlace descendente era de 20 dBm (100 mW). El cálculo del rango de comunicación se realizó para diferentes versiones de los estándares IEEE 802.11. La siguiente tabla muestra los resultados del cálculo para el enlace descendente (enlace descendente) y para el enlace ascendente (enlace ascendente). En los cálculos, se supuso que el UAV está a una altitud de 10 m.
En un experimento real, se estimó el nivel de la señal recibida. La figura a continuación muestra el nivel de señal dependiendo de la distancia para el modo de operación de infraestructura (izquierda) y el modo Ad-hoc (derecha) cuando la aeronave está operando a una altitud de 10 metros.

Los mismos datos experimentales pero para el funcionamiento del dron a una altura de 20 metros:
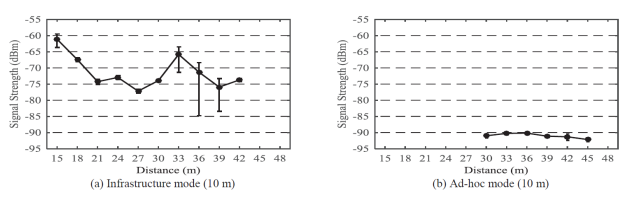
Los resultados muestran una notable diferencia entre los valores teóricos y prácticos. Son causados por muchos factores adicionales. Sin embargo, en general, el nivel de la señal recibida es mucho más alto que la señal recibida en el Ad-hoc. Las figuras byd muestran menos puntos de control medidos, ya que solo se registraron aquellas mediciones que se obtuvieron cuando el UAV funcionó como un punto intermedio entre dos dispositivos terminales. Los resultados obtenidos al conectar directamente el transmisor y el receptor de la computadora portátil no se tuvieron en cuenta. En otras palabras, cuando la distancia entre los puntos finales era inferior a 60 metros (para una altura de dron de 10 metros) u 80 metros (para una altura de 20 metros), el quadcopter no actuaba como un dispositivo intermedio en modo Ad-hoc.
Velocidad de datos
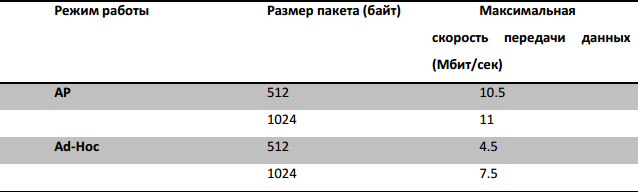
Para evaluar el rendimiento del modo de operación de infraestructura y el modo Ad-hoc en términos de rendimiento máximo, se utilizó iPerf para ejecutar paquetes entre los puntos finales. Las primeras mediciones se realizaron en condiciones de laboratorio. Velocidad medida en varios modos de operación y paquetes de 512 y 1024 bytes.
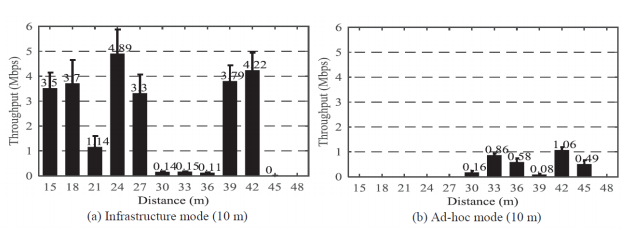
Las siguientes mediciones se llevaron a cabo en condiciones reales. La velocidad de la infraestructura es mayor que la velocidad de la red Ad-hoc.
Para el modo de operación infraestructural (a la izquierda) y el modo Ad-hoc (a la derecha) cuando se opera el dron a una altura de 10 metros:
Los mismos datos experimentales pero para el funcionamiento del dron a una altura de 20 metros:
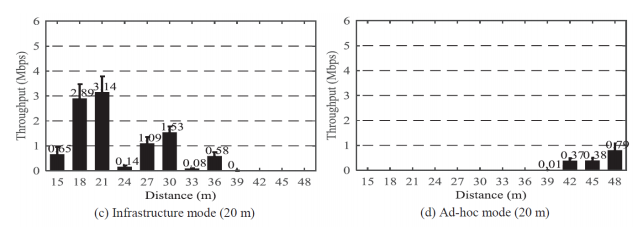
La velocidad máxima de transferencia de datos de Wi-F varía según la versión del estándar 802.11. Se determina principalmente por métodos de modulación, ancho de canal, número de flujos espaciales, codificación y métodos de espectro extendido.
Las velocidades máximas alcanzables para el experimento en cuestión se detallan a continuación:
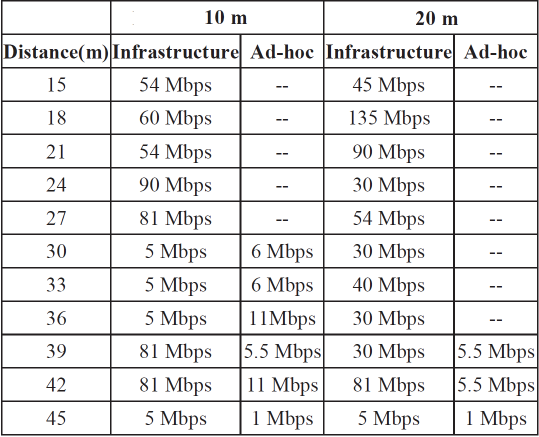
Aumentar la distancia afecta la calidad de la comunicación. A su vez, esto obliga a las tarjetas de red a recurrir a métodos de modulación más conservadores y a reducir las tasas de transferencia de datos. En modo de infraestructura, es posible soportar velocidades de transmisión más altas.
Arriba, durante los experimentos, se mostró claramente qué oportunidades se abren cuando se usan cuadricópteros para escanear redes de malla inalámbricas configuradas automáticamente. Con el desarrollo de tecnologías de comunicación y vehículos aéreos no tripulados, habrá muchas más oportunidades para desarrollar tal forma de construir una red