Hace 50 años, los primeros drones submarinos eran asequibles solo para los militares y por primera vez se "encendieron" para corregir el escándalo internacional a toda costa.
Luego, la tecnología migró al servicio de magnates de petróleo y gas para la construcción y mantenimiento de plataformas de producción oceánica.
El siguiente hito es la búsqueda del Titanic (pero en realidad fue un reconocimiento submarino disfrazado). Sin embargo, estas expediciones trajeron beneficios considerables para fines civiles y científicos.
Para atraer a los jóvenes a la industria, en 1998, los estadounidenses comenzaron a realizar una competencia internacional de estudiantes, y en 2013 comenzó el Campeonato Abierto de Asia en Singapur.
El precio de entrada en la industria estaba disminuyendo gradualmente: al principio solo había presupuestos militares, luego vinieron las corporaciones petroleras, seguidas por las universidades, y finalmente, aparecieron en escena proyectos de código abierto por más de $ 500 para "nuevas empresas de garajes". Y ahora incluso hay un diseñador de bricolaje de drones submarinos para estudiantes.
 Contenido1. Al buscar una bomba termonuclear en el fondo del mar español2. Plataformas petroleras oceánicas3. "Titanic" e inteligencia secreta bajo el agua4. Competiciones internacionales: EE. UU. Y Singapur5. Proyectos de código abierto, crowdsourcing y diseñador para estudiantes.6. Logros de los equipos de estudiantes rusos.
Contenido1. Al buscar una bomba termonuclear en el fondo del mar español2. Plataformas petroleras oceánicas3. "Titanic" e inteligencia secreta bajo el agua4. Competiciones internacionales: EE. UU. Y Singapur5. Proyectos de código abierto, crowdsourcing y diseñador para estudiantes.6. Logros de los equipos de estudiantes rusos.Busca una bomba termonuclear
Bomba termonuclear B28RI, elevada desde una profundidad de 869 metros.Accidente de avión sobre Palomares .La revista Time incluyó el incidente en la lista de los desastres nucleares más graves.
El 17 de enero de 1966, un bombardero estratégico estadounidense B-52G con armas termonucleares a bordo colisionó con un avión cisterna KC-135 mientras repostaba en el aire. Como resultado del desastre, 7 personas murieron y cuatro bombas termonucleares se perdieron. Tres de ellos aterrizaron en tierra y fueron encontrados inmediatamente, el cuarto, que cayó al mar, solo después de una búsqueda de dos meses.
El equipo de búsqueda incluyó al experto en buceo Capitán Willard Searle y un matemático, el Dr. John Craven, quien, utilizando la
teoría bayesiana de localizar efectivamente objetos perdidos, hizo un plan de búsqueda.
 Proyectiles de dos bombas termonucleares B28 de Palomares.
Proyectiles de dos bombas termonucleares B28 de Palomares.Para realizar operaciones de búsqueda, se formó un escuadrón de la Marina de los EE. UU. Compuesto por 34 barcos que transportaban a más de tres mil marineros y contratistas civiles. Para estudiar el fondo a profundidades de hasta 24 metros, se utilizaron buzos; Los buzos con trajes rígidos trabajaron a profundidades de hasta 120 metros. Las búsquedas a grandes profundidades fueron realizadas por Alvin y Aluminaut tripulados vehículos submarinos.
 Alvin: uno de los vehículos submarinos tripulados (PAP) más famosos. El batiscafo está diseñado para tres personas (dos científicos y un piloto) y le permite bucear a una profundidad de hasta 4500 metros en 10 horas.El primer submarino de aluminio del mundo , Aluminaut , 1964. Por cierto, Jacques Cousteau lo condujo.
Alvin: uno de los vehículos submarinos tripulados (PAP) más famosos. El batiscafo está diseñado para tres personas (dos científicos y un piloto) y le permite bucear a una profundidad de hasta 4500 metros en 10 horas.El primer submarino de aluminio del mundo , Aluminaut , 1964. Por cierto, Jacques Cousteau lo condujo.La bomba fue descubierta por Alvin a una profundidad de casi 800 metros. La bomba yacía en una pendiente de 70 grados de la falla, cuya profundidad alcanzó los 1300 metros. El primer intento de levantarlo, realizado el 26 de marzo, atando el cable a las eslingas de paracaídas, no tuvo éxito. La bomba se cayó y se perdió de nuevo. Fue descubierto el 2 de abril. El 5 de abril, hubo una grave situación de emergencia, cuando Alvin se enredó en un paracaídas, los pilotos del dispositivo perdieron la vista y no pudieron soltarlo durante 15 minutos.
Dispositivo de control remoto Vehículo de recuperación submarina controlado por cable (CURV).Después de este incidente, el aparato deshabitado de control remoto CURV se usó para más trabajo. El 7 de abril, con la ayuda del dispositivo, fue posible conectar dos cables al paracaídas, pero al intentar iniciar el tercer cable, el CURV también se confundió y perdió el control. Los intentos de liberarlo terminaron en fracaso, y se decidió levantar la bomba con el aparato en dos cables. El intento fue exitoso, y la bomba fue levantada sobre la cubierta del barco de rescate Petrel 81 días después del accidente.
Según el New York Times, esta fue la primera demostración pública de un arma nuclear.Los militares continuaron desarrollándose en el campo de los dispositivos remotos y autónomos. Mientras tanto, la industria petrolera ha puesto los ojos en la tecnología.
Sirviendo a la industria de petróleo y gas y plataformas de producción.

Los “vehículos submarinos deshabitados controlados a distancia” (TNPA, ROV) comenzaron a ganar popularidad en la década de 1980, cuando la mayor parte del nuevo desarrollo de petróleo y gas en alta mar superó las capacidades de los buzos. Pero a mediados de los años 80, la industria marina de TNLA sufrió un grave estancamiento en el desarrollo tecnológico, causado, en particular, por la caída de los precios del petróleo y la recesión económica mundial.
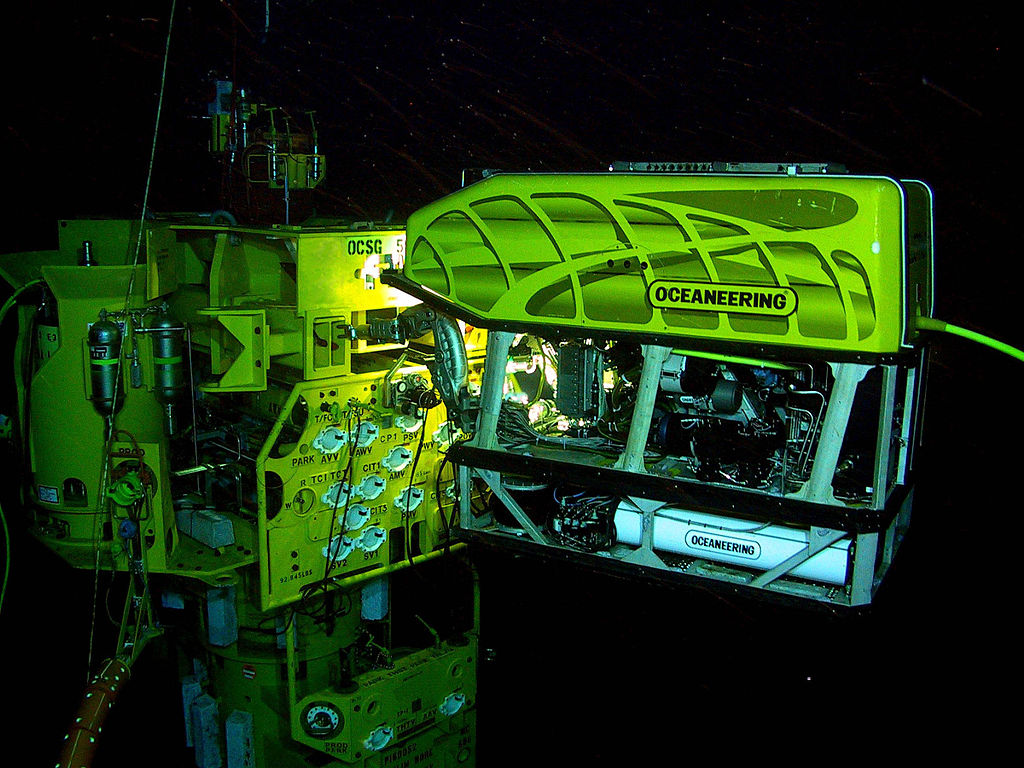 ROV en acción en el campo submarino de petróleo y gas. TNPA se vuelve loco en una estructura submarina.
ROV en acción en el campo submarino de petróleo y gas. TNPA se vuelve loco en una estructura submarina.TNLA como este son ampliamente utilizados en la producción en alta mar. Las nuevas tecnologías permiten a los robots sumergirse aún más.
Aquí, por cierto, está el legendario video de un tiburón mordiendo un cable submarino:
Titanic

El Titanic se hundió el 15 de abril de 1912. Los intentos de encontrarlo se hicieron en 1953, en 1966, en 1970 y en 1980. (Lea más
aquí .)
Según las facturas, una colección de joyas por valor de unos $ 300 millones fue transportada en el Titanic. Además, a bordo se encontraban los originales del rubí de Omar Khayyam, así como la momia de la antigua princesa egipcia.
Robert Ballard descubrió el Titanic en 1985. Aunque esta "expedición" fue solo una tapadera. La operación fue financiada por la Marina de los EE. UU. Para la inteligencia secreta de dos submarinos nucleares USS Scorpion y USS Thresher que se hundieron en la década de 1960, en lugar del Titanic. Los submarinos se hundieron en 1963 y 1968, respectivamente, y las fuerzas navales querían averiguar si había una fuga de radiación.
ANGUS es un grupo de cámaras de video y cámaras remolcadas por un barco bajo el agua en un cable:
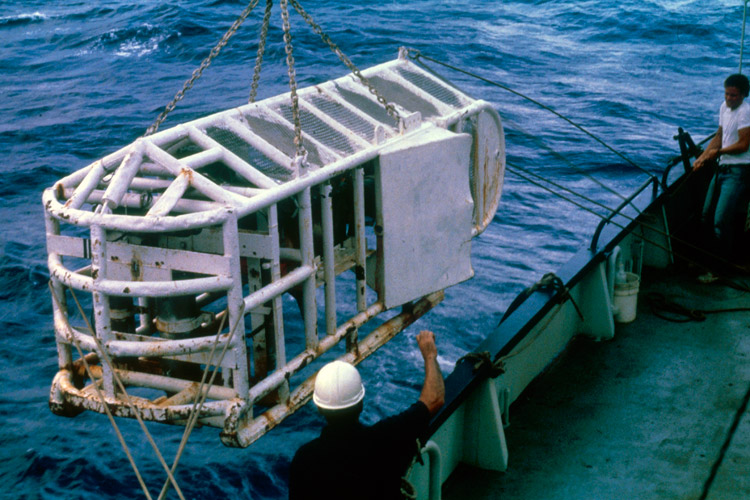 ANGUS (Encuesta subacuática geológica navegada acústicamente). Este dispositivo tenía desventajas: no era lo suficientemente eficiente. El material de archivo podría desarrollarse y estudiarse solo después de que el aparato saliera a la superficie.
ANGUS (Encuesta subacuática geológica navegada acústicamente). Este dispositivo tenía desventajas: no era lo suficientemente eficiente. El material de archivo podría desarrollarse y estudiarse solo después de que el aparato saliera a la superficie.Los creadores de este aparato todavía eran divertidos. Los ingenieros llamaron cariñosamente al dispositivo "un tonto con una cuerda" debido a la falta de las formas más simples de control. El lema del equipo ANGUS fue la frase "Aunque está goteando, sigue funcionando".
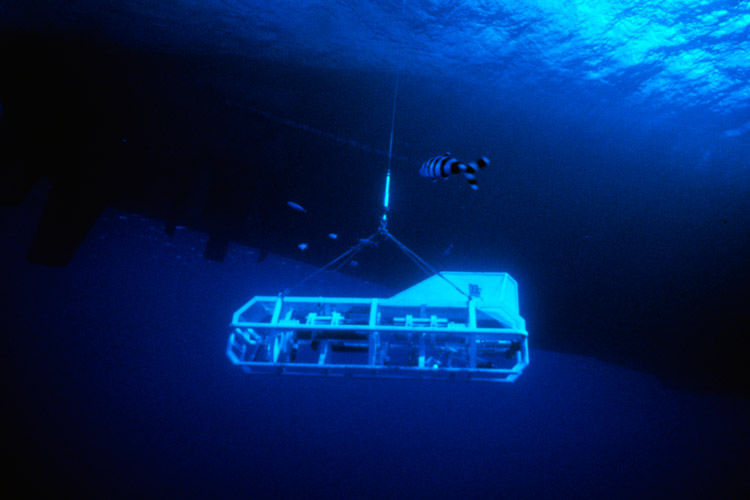 Argo, como ANGUS, era una estructura metálica equipada con cinco cámaras de video y dos sistemas de sonar.
Argo, como ANGUS, era una estructura metálica equipada con cinco cámaras de video y dos sistemas de sonar.El 1 de septiembre de 1985, un monitor conectado a la cámara de video Argo mostró objetos de origen no natural. Al día siguiente, se descubrió el casco del Titanic, y ANGUS fue enviado al fondo para tomar fotografías.
Durante los siguientes cuatro días, Argo y ANGUS tomaron miles de fotografías. Los restos del Titanic se dispersaron sobre un área con un radio de 1600 metros a una profundidad de unos 3800 metros.
El 12 de julio de 1986, Ballard realiza la segunda expedición al Titanic. Ahora tiene a su disposición un batiscafo de tres personas "Alvin" y un robot de control remoto Jason Jr.
.jpg) "Alvin" - uno de los vehículos submarinos tripulados (PAP) más famosos. El batiscafo está diseñado para tres personas (dos científicos y un piloto) y le permite bucear a una profundidad de hasta 4500 metros en 10 horas.El aparato "Jason Junior" (Jason Jr)Estudio del Titanic con el aparato Jason Junior.
"Alvin" - uno de los vehículos submarinos tripulados (PAP) más famosos. El batiscafo está diseñado para tres personas (dos científicos y un piloto) y le permite bucear a una profundidad de hasta 4500 metros en 10 horas.El aparato "Jason Junior" (Jason Jr)Estudio del Titanic con el aparato Jason Junior.En 1987, el National Geographic Channel filmó un documental en busca del Titanic, James Cameron lo vio y se inspiró para crear su propia obra maestra.
En septiembre de 1995, Cameron realizó personalmente 12 inmersiones al Titanic en las batiscafas Mir-1 y Mir-2 a bordo del buque de investigación ruso Akademik Mstislav Keldysh, que también participó más tarde en la película.
La película Titanic valía más que el barco en sí. La construcción del barco costó 4,000,000 libras, que en dinero moderno es 100,000,000 libras, y el costo de la película de James Cameron es 125,000,000 libras.
Competiciones internacionales
Las competiciones son una excelente mecánica de juego que atrae a los jóvenes y le permite "orientar la carrera" a muchos especialistas en el campo de interés. La aparición de concursos internacionales es un hito importante en el desarrollo de drones submarinos y la formación de la industria y el mercado.
RobosubLas competiciones internacionales se llevan a cabo desde 1998 y se llevan a cabo en el Centro de Sistemas Navales y Espaciales de EE. UU.
Sitio web:
www.robonation.org/competition/robosubReglas 2017 (PDF).
 Los
Los vehículos submarinos
autónomos (AUV) participan en la competencia RoboSub y completan misiones realistas en entornos submarinos exigentes.

Fundada por la Asociación Internacional de Desarrolladores de Máquinas no tripuladas, la Fundación AUVSI es una organización sin fines de lucro que brinda a los estudiantes la oportunidad de participar en actividades prácticas de robótica diseñadas para estimular y mantener su interés en la ciencia, la tecnología, la ingeniería y las matemáticas (STEM).

Cada año, la Fundación AUVSI ofrece una serie de programas educativos, así como competencias de robótica, que permiten a los estudiantes aplicar su educación técnica fuera del aula. Tales eventos son una preparación ideal para actividades profesionales, por lo tanto, a los estudiantes que participan en ellos a menudo se les ofrece la codiciada pasantía y empleo antes de la graduación.
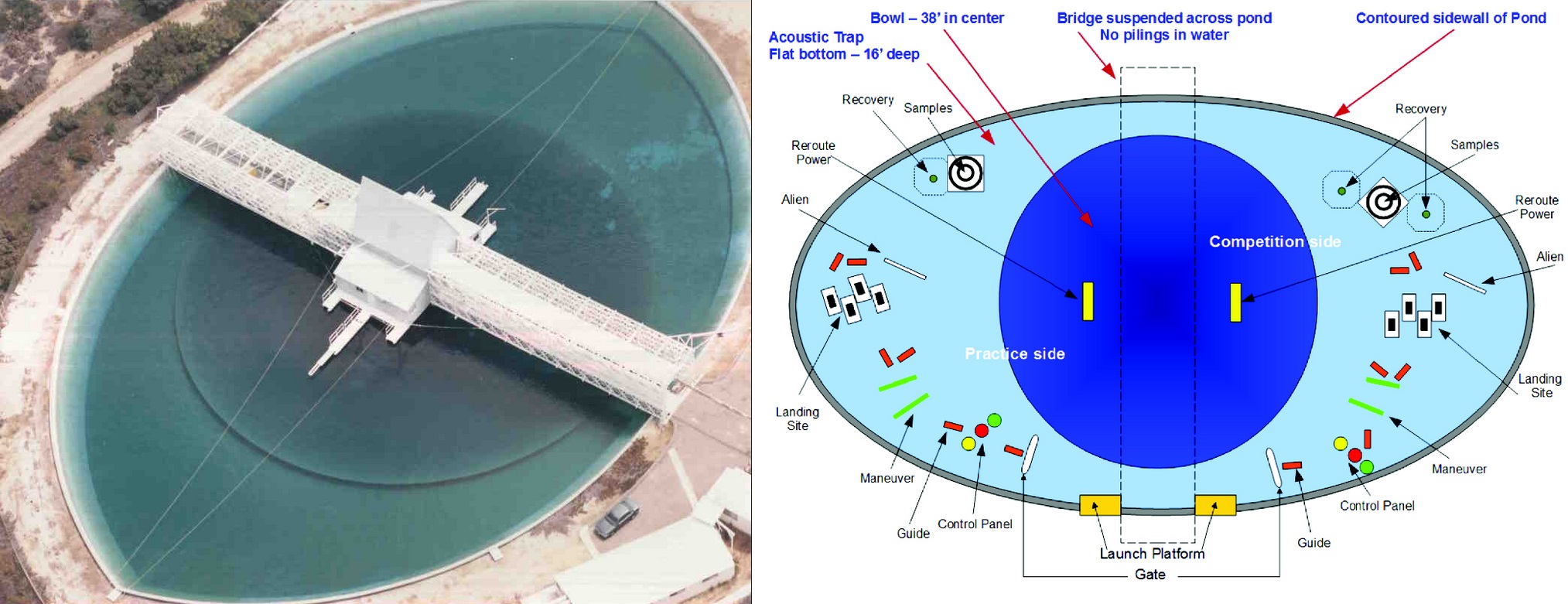
Desafío de AUV de Singapur (SAUVC)Singapore AUV Challenge (SAUVC) Open Asian Underwater Robotics Championship, las competiciones se han celebrado en Singapur desde 2013.
Sitio web -
www.sauvc.orgPágina de Facebook .
Reglas 2018 .
Así es como el competidor en 2013 describe la tarea en sus propias palabras:
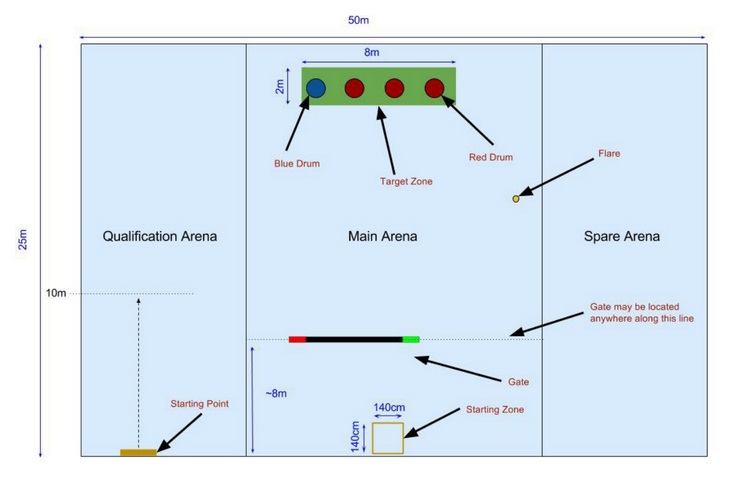
“La tarea se puede describir aproximadamente de la siguiente manera: debe pasar la franja negra en el fondo de la piscina y, en algún momento, emerger. Es decir, tal robot de seguimiento de línea. Las reglas, sin embargo, algo poco claras describen todo el asunto. Hay algunas puertas por las que debes pasar. Pero si es bueno pasar la franja, entonces a través de ellos pasarás automáticamente. También hay un soporte en el que se coloca la pelota, y debe ser pateada. Nuevamente, si caminas muy por encima de la franja y a la altura correcta, la próxima vez que gires la pelota patearás automáticamente. Y debe emerger en el lugar correcto, cuando termina la barra negra. En general, toda la competencia giraba en torno a una franja negra en la parte inferior :-) ".
Una historia detallada sobre 2013 en robótica submarina está
aquí .

Openrov
Garage Startup fue el comienzo de la historia de Hewlett-Packard y Apple, así como muchos otros proyectos de Silicon Valley. Cuando la tecnología está disponible para los "piratas informáticos", comienzan a experimentar por su cuenta y encontrar soluciones sorprendentes.
En 2012, se lanzó en Kickstarter el proyecto OpenROV, un mini robot subacuático controlado a distancia que pesaba aproximadamente 2,5 kg. Se controla desde una computadora portátil, equipada con una cámara de video con luz de fondo. Profundidad de inmersión: hasta 100 metros, duración de la batería: ~ 1.5 horas. Está impulsado por tres motores sin escobillas (motor sin escobillas 800Kv): dos en el plano horizontal y uno en el plano vertical. Para obtener una imagen visual, se utiliza una cámara web convencional (Microsoft LifeCam HD-5000), que se conecta a través de USB a BeagleBone.
El kit viene en forma de repuestos que deben ensamblarse. Los desarrolladores del proyecto se propusieron el objetivo de hacer que la investigación subacuática sea barata y accesible para todos, según los principios del software de código abierto y el hardware de código abierto. Los dibujos están disponibles en
GitHub .
Rendimiento en TED:
 La placa Beagle se utiliza como computadora de a bordo.Trident 2016 (próxima versión de OpenROV)
La placa Beagle se utiliza como computadora de a bordo.Trident 2016 (próxima versión de OpenROV)StartROV OpenROV, EE. UU., Recauda fondos para crear el vehículo de telecontrol submarino (ROV) Trident. La compañía planeó recaudar $ 50 mil, pero en su lugar ya ha atraído más de $ 560 mil.
OpenROV 2.8 y Trident DronesEl rango de control es de hasta 100 metros. Peso - 2.9 kg. La velocidad máxima es de 2 m / s. Duración de la batería: 3 horas. Soporte para desplazamiento automático y mantenimiento de la dirección del movimiento. Se puede conectar a gafas de realidad virtual para el control en primera persona.
Gladius 2017En 2017, otro
proyecto de crowdfunding de un robot submarino apareció en el sitio de IndiGoGo.

Cámara de video 4k, 100 metros de profundidad, 500 radios de acción, precio 600-1700 dólares.
Diseñador para escolaresMUR - Paquete de Competencia JuniorSkills.
El desarrollo fue presentado por Sergey Moon de Vladivostok en la exposición RoboMech-2015 en Khabarovsk el 12 de noviembre.
Sitio del proyecto -
murproject.comSobre la base de este constructor, la Olimpiada NTI se lleva a cabo para estudiantes de secundaria de toda Rusia en el perfil
"Sistemas robóticos de agua" .
En las etapas de calificación, es necesario resolver los problemas de física e informática, así como dominar el control de los robots submarinos en un simulador 3D.
En la etapa final, las tareas son más interesantes:
- montaje de dos robots submarinos del diseñador (se propone el diseñador MUR);
- ambos robots deben recorrer la distancia, guiados por objetos submarinos. Pero solo un robot está equipado con cámaras, el segundo debe recibir una señal del primer robot;
- desarrollo de su propio dispositivo de comunicación entre robots, utilizando los componentes propuestos y teniendo acceso a los protocolos y circuitos eléctricos del diseñador;
- organización de la comunicación entre robots.
En 2017, la Olimpiada "Sistemas robóticos inteligentes de agua" se celebró en Innopolis. (Las reglas están
aquí ).
Rusia, Vladivostok
Me alegró mucho saber que el equipo de desarrollo de drones submarinos de mi ciudad y mi universidad
(Far Eastern Federal University - FEFU) es genial.
 Desde 2012, el equipo conjunto de robótica de la Universidad Federal del Lejano Oriente y la Rama del Lejano Oriente de la Academia de Ciencias de Rusia se convierte anualmente en el ganador de la clase de robots autónomos en los torneos mundiales RoboSub y el Campeonato Asiático de Desafío AUV de Singapur.
Desde 2012, el equipo conjunto de robótica de la Universidad Federal del Lejano Oriente y la Rama del Lejano Oriente de la Academia de Ciencias de Rusia se convierte anualmente en el ganador de la clase de robots autónomos en los torneos mundiales RoboSub y el Campeonato Asiático de Desafío AUV de Singapur.Y aquí está el Junior, el robot con el que el equipo de Vladivostok
captura las profundidades de las piscinas y gana premios.
 Robosub
Robosub2012 - 5to lugar (FEFU, Vladivostok)
2013 - 3er lugar (FEFU, Vladivostok)
2014 - 4to lugar (FEFU, Vladivostok)
2015 - 3er y 6to lugar (Universidad Marítima llamada así por Nevelsky y FEFU, Vladivostok)
2016 - 4to lugar (Universidad Marítima llamada así por Nevelsky, Vladivostok)
2017 - 2do lugar (FEFU, Vladivostok)
Desafío AUV de Singapur2013 - 1er lugar (FEFU, Vladivostok)
2015 - 2do lugar (FEFU, Vladivostok)
2016 - 2do lugar (FEFU, Vladivostok)
2017 - 1er lugar (FEFU, Vladivostok)
Escribiré sobre el equipo de Vladivostok (entrevistas con desarrolladores, características de rendimiento del robot, etc.) y sobre las reglas de las competiciones internacionales en el próximo número.Fuentes
- Accidente de avión sobre Palomares , Wikipedia
- Palomares Bombas de hidrógeno en la playa , TopWar
- Inmersión completa: cómo el uso de robots en busca del Titanic ha cambiado el enfoque de la investigación subacuática , T&P
- Formas inusuales de elevar el "Titanic": versiones de científicos , RIA Novosti
- Robert Bollard explora los océanos , TED
- El camino de James Cameron , Wired, Geektimes
- James Cameron: Antes de Avatar ... el niño curioso , TED
- Robosub
- Temporada de robo 2013: desde debajo del agua hasta el cielo , Geektimes
- OpenRov , Wikipedia
- OpenROV - Robot submarino (código abierto) , Habrahabr
- David Lang: mi robot submarino , TED
- Dron submarino OpenROV Trident , Geektimes
- Diseñador para estudiantes Micro Underwater Robot Edu
- Olimpiada NTI: sistemas robóticos de agua