 Carcraft, software para construir un mundo virtual
Carcraft, software para construir un mundo virtualEn la esquina del campus de Alphabet, hay un equipo trabajando en software que podría ser la clave para crear robomobiles. Ni un solo periodista lo ha visto antes. Lo llaman Carcraft, después del popular juego World of Warcraft.
El creador del software, un joven ingeniero con el pelo despeinado y la cara de un niño, James Stout, está sentado a mi lado en una oficina abierta, donde reina el silencio y todos usan auriculares. La pantalla muestra una sección de una carretera virtual con un movimiento circular. No hay nada que llame la atención: una imagen simple de varias líneas y un fondo con texturas de carreteras. Vemos un auto robótico Chrysler Pacifica de resolución media y una estructura metálica simple que representa otro vehículo.
Hace unos meses, el equipo de desarrollo se topó con un movimiento tan circular en Texas. La velocidad y la complejidad de la situación de la carretera pusieron al automóvil en una posición difícil, por lo que el equipo decidió construir una parte de la carretera de la misma configuración en el sitio de prueba. Y ya estoy viendo la tercera etapa del proceso de capacitación: digitalizar la conducción real. Aquí, la única maniobra del conductor del mundo real, por ejemplo, un automóvil que lo corta en un movimiento circular, puede convertirse en miles de escenarios simulados que exploran los límites de las capacidades de un automóvil.
Tales escenarios forman la base de una poderosa herramienta de simulación. "La mayor parte del trabajo sobre nuevas características está motivada por lo que vimos en las simulaciones", me dice Stout. Esta herramienta aceleró el desarrollo de vehículos robóticos en Waymo, creado por Alphabet (Google femenino) desde su unidad de investigación X en diciembre de 2016.
Si Waymo puede crear autos totalmente autónomos en los próximos años, Carcraft debería ser recordado como un mundo virtual que jugó un papel importante en el cambio del mundo real en el que fue creado.
Inicialmente, fue diseñado para desplazarse por las escenas que encuentran los automóviles cuando viajan en la vía pública. Ahora Carcraft, y en general todas las simulaciones, juegan un papel cada vez más importante en el desarrollo de vehículos robóticos.
En cada momento, cerca de 25,000 robomóviles virtuales aran versiones totalmente modeladas de Austin, Mountain View y Phoenix, así como varias pistas de prueba. Waymo puede jugar una simulación de un viaje a lo largo de un camino particularmente difícil cientos de miles de veces al día. En total, en el mundo virtual, los automóviles conducen hasta 8 millones de millas por día. En 2016, viajaron 2.500 millones de millas virtuales, en comparación con solo 3 millones de millas recorridas por prototipos reales de Google de Google en carreteras reales. Y, lo que es más importante, las millas virtuales se centran en lo que los empleados de Waymo llaman carreteras "interesantes" donde los automóviles pueden aprender algo nuevo. No solo son millas aburridas en la carretera camino al trabajo.
Las simulaciones son parte del intrincado proceso desarrollado por Waymo. Vincularon estrechamente los millones de millas conducidas por sus autos en DOP con el programa de "inspección estructural" que gastan en la base secreta de Zamok en el Valle Central.
Hasta el momento, Waymo no ha revelado su sistema al mundo. Millas en carreteras regulares les muestran dónde necesitan sus autos práctica adicional. Construyen caminos de la configuración necesaria en el Castillo, lo que les permite jugar miles de escenarios diferentes en el acto. Y en cualquiera de los dos tipos de comprobaciones, en el mundo real, las máquinas recopilan suficientes datos para recrear completamente la situación en forma digital en cualquier momento. En este espacio virtual, puede liberarse de las limitaciones de la vida real y crear miles de opciones para cualquier escenario, y luego hacer que el automóvil las atraviese todas. Para mejorar el software que conduce el automóvil, se vuelve a descargar en los automóviles, que luego conducen por carreteras aún más largas y de mayor complejidad, y el ciclo se repite.
Para llegar al Castillo, desde la Bahía de San Francisco, debe ir hacia el este, luego hacia el sur por la 99, y luego a lo largo de la carretera del Valle Central, hacia el sur hasta Fresno. Los campos de maíz son adyacentes a los suburbios en crecimiento; el horizonte desaparece detrás de la neblina agrícola. Hace 30 grados más que San Francisco, y la superficie es tan plana que las laderas de este "Mar de la Tierra", como lo llamó
John McPhee , solo se pueden medir con láser. Te mudarás cerca de la pequeña ciudad de Etwater, donde una vez estuvo la Base de la Fuerza Aérea del Castillo, donde 6,000 personas sirvieron el programa B-52. Ahora se encuentra en la frontera norte de la pequeña ciudad de Merced, donde el desempleo en la década de 2010 alcanzó el 20%, e incluso ahora rara vez está por debajo del 10%. El 40% de la población habla español. Cruzamos el ferrocarril y entramos en el territorio de la antigua base de 650 hectáreas, que ahora alberga todo tipo de cosas, desde el departamento de control de vida silvestre hasta esta prisión estatal.
Mi navegador en el teléfono no me llevó a una dirección específica, sino a coordenadas GPS. Recorremos una valla verde alta y opaca hasta que Google Maps le indique que es hora de detenerse. Nada indica la presencia de ninguna puerta. Todo parece otra sección de la cerca, pero mi representante anfitrión parece confiado. De repente, en la brecha cada vez mayor entre la puerta y la cerca, aparece un guardia y comienza a revisar nuestros documentos.
 La valla
La vallaLa valla se separó, y nos dirigimos a un campus bullicioso. Jóvenes con pantalones cortos y sombreros corren de aquí para allá. Puedes ver autos residenciales, garajes de cúpula y en el estacionamiento cerca del edificio principal: robomobiles. Aquí hay varios tipos de robomobiles: modelos de Lexus que los residentes de EE. UU. Podrían conocer en DOP, Prius, camionetas Chrysler Pacifica retiradas y nuevas.
Los robomobiles son fáciles de distinguir. Están tachonados de sensores. Más que otros, se emiten escáneres láser (lidars) en el techo. Pero Pacifica también tiene pequeños lidares del tamaño de una lata de cerveza que giran alrededor de los espejos laterales. En la parte trasera, están equipados con radares similares a los oídos de Shrek.
Cuando enciende los sensores de la máquina, incluso si no se mueve, el lidar giratorio emite un sonido extraño. Algo entre un aullido y un retumbar, este sonido es desagradable porque me parece una novedad y mis oídos no pueden filtrarlo junto con los otros sonidos de los autos con los que crecí.
Un automóvil aún más interesante está estacionado en el edificio principal. Las señales X están impresas en todo el cuerpo con cinta roja. Es un automóvil de cuarto nivel. Los niveles son designaciones desarrolladas por la comunidad de ingenieros automotrices que describen el grado de autonomía de un robot robótico. Esos autos en las carreteras de los que escuchamos están en el primer o segundo nivel, es decir, pueden ir en un control de crucero "inteligente" en la carretera. Pero el auto con la X roja es una bestia completamente diferente. No solo es completamente autónomo, la persona dentro de él simplemente no podrá conducirlo, por lo tanto, no quieren mezclarlo con sus otras máquinas.
Conducimos hasta el estacionamiento, y en todas partes las señales del proyecto de Manhattan, un puesto de avanzada científica y una nueva tecnología están en todas partes. En el edificio principal, un automóvil móvil del tamaño de un salón de clases, me encuentro con la fuerza impulsora de este lugar notable. Se llama Stef Villegas.
Está vestida con una blusa blanca larga y ajustada con cuello, jeans terriblemente andrajosos y zapatillas de punto grises; todo está terriblemente de moda, como sigue una ex empleada de la boutique Azalea, desde donde se transfirió a Google. Ella creció en un suburbio de East Bay al otro lado de las colinas de Berkeley y obtuvo una licenciatura en arte de la Universidad de California en Berkeley antes de unirse al Programa de Desarrollo Robomobile 2011.
"¿Condujiste un auto?" Pregunto
"Conduzco todo el tiempo", dice ella.
Pasa incontables horas viajando por las autopistas 101 y 280, desde San Francisco hasta Mountain View. Como todos los conductores, desarrolló un sentido de cómo se comportan los automóviles en la carretera. Y este conocimiento resultó ser bastante importante para el programa para el desarrollo de automóviles robot. Han desarrollado una idea intuitiva de lo que puede ser difícil para las máquinas. "Al revisar el software actualizado y tener una posición permanente en el equipo, comencé a pensar en qué otras tareas complejas podrían establecerse para el sistema", dice ella.
Así que Villegas y varios ingenieros comenzaron a idear y crear escenarios raros de situaciones que les permitirían probar el nuevo comportamiento de las máquinas en un entorno controlado. Comenzaron a ocupar el estacionamiento frente al
Anfiteatro costero , instalándose en las entradas de su gente para que solo los googlers permanecieran en el estacionamiento.
"Todo comenzó allí", dice ella. "Yo y varios conductores estuvimos allí". Se nos ocurrió una serie de ideas que queremos probar, cargamos todo lo que necesitábamos en una camioneta y lo condujimos a través del estacionamiento, haciendo controles ”.
Así surgieron las primeras pruebas estructuradas en el programa de desarrollo robomobile. Resulta que lo más difícil fue procesar escenarios no complicados inventados por personas, como "que si hay un zombie en el camino", sino simplemente conducir con confianza y fiabilidad en infinitas variantes del tráfico ordinario.
Villiegas comenzó a recolectar accesorios de todo lo que podía conseguir: maniquíes, conos, plantas artificiales, juguetes, patinetas, triciclos, muñecas, pelotas, todo tipo de cosas. Todo esto entró en un conjunto de accesorios (como resultado, comenzaron a almacenarlo en una tienda de campaña y ahora, en el Castillo, en un almacén especial).
 Almacén requerido
Almacén requeridoPero hubo problemas. Era necesario que el automóvil condujera más rápido, reconozca los semáforos y las señales. Los planes interferían constantemente con los conciertos celebrados en el Anfiteatro. "Ha habido casos como: 'Bueno, Metallica viene, tendremos que deshacernos de él'", dice ella.
Necesitaban una base secreta. El castillo era solo eso. Firmaron un contrato de arrendamiento y comenzaron a construir la ciudad de sus sueños falsos. "Hicimos específicamente calles residenciales, autopistas, callejones sin salida, estacionamientos y todo eso, para que obtengamos una selección representativa de lugares característicos por los que podría viajar".
Vamos de la oficina principal a su auto. Ella me da un mapa cuando vamos de excursión. "Es como Disneyland, así que puedes navegar", dice ella. El mapa está cuidadosamente diseñado. En una esquina hay una insignia de estilo Las Vegas: "Bienvenido al Castillo de Cuento de Hadas en California". Las diferentes áreas del campus incluso se adhieren a las reglas de nomenclatura. En el que conducimos, cada camino lleva el nombre del famoso automóvil (
DeLorean ,
Bullitt ) o en honor al automóvil del primer parque basado en Prius, que existía en los primeros días del programa (Barbaro).
Pasamos por los edificios rosados, los viejos cuarteles, uno de los cuales ha sido renovado; los empleados de Waymo descansan allí cuando no pueden regresar a la bahía. Además de estos, no hay otros edificios en el área de prueba. Esta es realmente una ciudad para robomobiles: todo lo que importa está en el pavimento o limita con él.
 "Ciudad" en el castillo
"Ciudad" en el castilloPara una persona, todo esto se parece al nivel de un juego de computadora sin personajes. Es bastante extraño que sientas que te mueves de los bulevares a calles aparentemente residenciales con entradas de cemento e intercambios suburbanos que no tienen edificios. Algunas secciones del camino me parecen familiares periódicamente.
Nos acercamos a una gran rotonda de dos carriles. En el centro hay un círculo con una valla blanca. "Esta rotonda apareció aquí específicamente después de que probamos la rotonda de varios carriles en Austin, Texas", dice Villegas. - Al principio, solo teníamos una rotonda de un solo carril y decidimos: "Bueno, está bien, hemos terminado esta etapa". Y luego nos topamos con una multibanda y nos maravillamos: '¡Guau, un caballo de un color diferente! Gracias Texas. Por lo tanto, hemos creado esta belleza en nosotros mismos ".

Nos detenemos y Villegas está considerando una nueva incorporación: dos carriles para automóviles y un carril para bicicletas pasan por un área de estacionamiento paralela que bordea el césped. “Realmente quería crear una calle con estacionamiento paralelo aquí. Esto a menudo se encuentra en los suburbios. Walnut Creek. Vista a la montaña. Palo Alto ”, dice ella. - La gente sale de las tiendas o del estacionamiento. La gente camina entre automóviles, cruza la calle con cosas en sus manos ". La tira era un fragmento de su memoria, encarnada en asfalto y concreto, que luego se convertiría en una forma más abstracta, para mejorar la capacidad del robot para procesar el terreno familiar.
Ella me lleva de regreso a la oficina principal, y nos subimos a la furgoneta robótica, una de las Chrysler Pacificas. Nuestro conductor es Brandon Kane. Su asistente en el asiento del pasajero controlará el comportamiento del automóvil en una computadora portátil utilizando el programa XView.
Un grupo de asistentes, a quienes llaman "zorros", trabaja con ellos: el apodo ha surgido de la palabra "artificial" [zorro - zorro, falso - artificial / aprox. transl.]. Conducen automóviles, crean tráfico, juegan a los peatones, andan en bicicleta, mantienen las señales de alto. Estos son los actores cuya audiencia es el automóvil.
Nuestro primer control es simple paso y corte, pero a alta velocidad. En este caso, es de 70 km / h. Conducimos en línea recta por el camino ancho que llamaron la autopista.
Cuando el zorro nos interrumpe, la máquina Waymo frena y el equipo verifica un indicador clave en este caso: el frenado. Intentan crear situaciones en las que el automóvil deba frenar bruscamente. Que afilado En algún lugar entre "el infierno, no tengo tiempo para un semáforo" y "sudaba bruscamente y el teléfono salió volando del asiento".
Diré algo extraño: este no es mi primer viaje a un robot robótico. En el pasado, conduje dos veces en dos robomobiles diferentes: la primera en un SUV Lexus que me condujo por las calles de Mountain View, y la segunda en un pequeño automóvil Google Firefly que viajaba en el techo de un edificio de Google. Estos fueron viajes sin complicaciones, que, de hecho, todos aspiran.
Ahora todo es diferente. Dos autos de rápido movimiento, uno de los cuales debería cortarnos bastante bruscamente.
Es hora de comenzar. Kane enciende el auto, y después de un pitido el auto dice: "Auto". Otro automóvil se nos acerca y nos interrumpe como conductor de Porsche, esforzándose por ser el primero en llegar a la salida. Frenamos fuerte, rápida y suavemente. Estoy impresionado
Verifican los datos de frenado y entienden que no estábamos frenando lo suficiente. Tengo que repetirlo. Y una y otra vez ... El segundo auto nos corta en diferentes ángulos, de una manera diferente. Lo llaman "obtener cobertura".
 Reconstruir a alta velocidad. Uno de los autos es autónomo.
Reconstruir a alta velocidad. Uno de los autos es autónomo.Estamos haciendo tres controles más: reconstruir a alta velocidad, reunirnos con un automóvil que conduce hacia atrás desde un callejón a tres cuadras de nosotros, y una parada suave al ver una pelota de baloncesto que ha salido a la carretera. Cada una de las maniobras es impresionante a su manera, pero recuerdo la prueba con menos socavación.
Cuando vamos al reinicio, Kane se mueve al asiento. "¿Has visto
Pacific Rim ?" Me pregunta - Película Guillermo del Toro, donde la gente sincroniza acciones con robots gigantes para luchar contra monstruos. Estoy tratando de sincronizar acciones con un robot robótico. Tenemos algunos pensamientos comunes.
Le pido que explique lo que quiere decir. "Estoy tratando de adaptarme a la diferencia de peso debido a las personas presentes en el automóvil", dice. - Paso mucho tiempo en el auto y puedo sentir lo que está haciendo - suena extraño, sí - con mi trasero. Entiendo lo que quiere hacer ".
Lejos de la bruma y el calor del castillo en Mountain View, se encuentran las cómodas oficinas centrales de Google. Acudí a ellos para reunirme con ingenieros que trabajan dentro de X, a quienes quizás conozcas como Google X. Esta división de la compañía se dedica a proyectos de investigación de alto riesgo a largo plazo. En 2015, cuando Google reestructuró y organizó el conglomerado Alphabet, X dejó a Google en el título (su sitio web se llama X.company). Un año después de eso, X / Alphabet decidió separar el programa para crear robomobiles en una compañía separada, como ya sucedió con varios otros proyectos, y apareció Waymo. Parece un primo de Google.
Por lo tanto, aunque las oficinas de Waymo todavía están dentro del "barco de transporte", estos dos clics ya se están separando lentamente, y todos los empleados de Waymo están sentados por separado.
El edificio X / Waymo es grande y ligero. Los prototipos de aviones no tripulados Project Wing están en todas partes. Veo una pequeña máquina de escribir Firefly construida por la compañía. "Hay algo bueno en lo que hiciste tú mismo", me dijo Villegas en el castillo. "Pero no había aire acondicionado en ellos, así que no los extraño".
No lejos de la cafetería en la esquina de una de las alas del edificio se encuentra el grupo de simulación Waymo. Todos parecen tener Carcraft y XView en las pantallas. Un número notablemente grande de polígonos sobre un fondo oscuro. Son estas personas las que crean los mundos virtuales en los que conducen los automóviles Waymo.
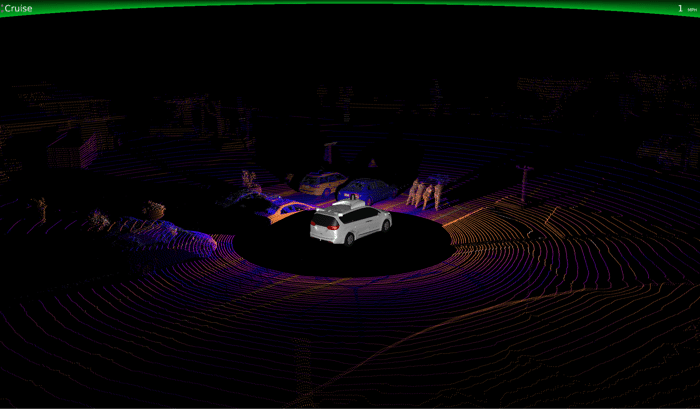 Lo que vio el escáner láser Waymo cuando cuatro empujaban un automóvil
Lo que vio el escáner láser Waymo cuando cuatro empujaban un automóvilEstoy esperando a James Stout, creador de Carcraft. No tiene la oportunidad de hablar públicamente sobre su proyecto, por lo que estalla su entusiasmo. Carcraft es su creación.
"Estaba buscando vacantes y vi que el equipo para crear robomóviles estaba reclutando empleados", dice. "No puedo creer que hayan publicado un trabajo". Se unió al equipo e inmediatamente comenzó a crear un instrumento, gracias a lo cual hoy se recorren 8 millones de millas virtuales por día.
Inicialmente, la herramienta se usó principalmente para monitorear lo que harían sus automóviles en situaciones difíciles en las que los conductores en vivo toman el control del automóvil. A partir de esos momentos, comenzaron a crear guiones. "Rápidamente se hizo evidente que esta era una herramienta muy útil, y que se podía crear mucho sobre esta base", dice Stout. Las posibilidades de Carcraft han crecido para que ahora se adapte a ciudades enteras, y la cantidad de autos se ha convertido en un gran parque virtual.Stout me presenta a Elena Kolarov, jefa del Departamento de Servicios de Scripting. Delante de ella hay dos monitores. A la derecha, Xview muestra lo que ve la máquina. La máquina utiliza cámaras, radares y lidar para identificar objetos en el campo de visión; los presenta en forma de pequeñas formas de alambre.Las líneas verdes emergen de las formas y muestran las posibles formas en que, según la máquina, los objetos pueden moverse. A continuación se muestra una parte de la imagen, que muestra que se están filmando cámaras de automóviles comunes. Kolyarova puede activar la visualización de los datos recibidos del LIDAR, que se muestran en puntos naranjas y morados.Estamos buscando reproducir el caso real de reordenamiento en una línea en un movimiento circular en el Castillo. Kolyarova cambia al simulador. Todo se ve igual, pero este no es un registro del evento, sino una nueva situación que la máquina debe enfrentar. La única diferencia es que en la parte superior de la pantalla hay una inscripción "simulación", en letras rojas grandes. Stout dice que tuvo que agregarlo porque la gente seguía confundiendo la simulación con la realidad todo el tiempo. Cómo se ve el movimiento circular en el castillo en XViewCargan una situación diferente. Fue en Phoenix. Kolyarova amplía la imagen para mostrar su modelo de la ciudad. Para todo el modelo, señalaron, "dónde están todos los carriles, en qué carriles se convierten, dónde están las señales de alto, dónde están los semáforos, las aceras, dónde están los centros de carriles, todo lo que necesita saber", dice Stout.
Cómo se ve el movimiento circular en el castillo en XViewCargan una situación diferente. Fue en Phoenix. Kolyarova amplía la imagen para mostrar su modelo de la ciudad. Para todo el modelo, señalaron, "dónde están todos los carriles, en qué carriles se convierten, dónde están las señales de alto, dónde están los semáforos, las aceras, dónde están los centros de carriles, todo lo que necesita saber", dice Stout.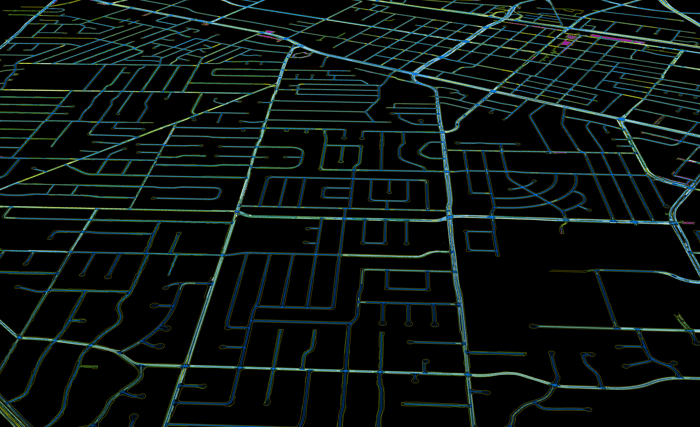 Ahora estamos aumentando una intersección de cuatro vías en algún lugar cerca de Phoenix. Kolyarova comienza a colocar coches artificiales, peatones y ciclistas en él.
Ahora estamos aumentando una intersección de cuatro vías en algún lugar cerca de Phoenix. Kolyarova comienza a colocar coches artificiales, peatones y ciclistas en él. Creando una Situación Artificial en CarcraftAl presionar una tecla de acceso rápido, los objetos comienzan a moverse. Los autos se comportan como autos, conducen en su carril o giran. Los ciclistas se comportan en consecuencia. Su lógica se tomó de los datos obtenidos del millón de millas acumuladas en el DOP. Y todo esto se basa en un mapa súper detallado del mundo y modelos físicos de diferentes participantes en la situación.
Creando una Situación Artificial en CarcraftAl presionar una tecla de acceso rápido, los objetos comienzan a moverse. Los autos se comportan como autos, conducen en su carril o giran. Los ciclistas se comportan en consecuencia. Su lógica se tomó de los datos obtenidos del millón de millas acumuladas en el DOP. Y todo esto se basa en un mapa súper detallado del mundo y modelos físicos de diferentes participantes en la situación. No es sorprendente que lo más difícil sea simular el comportamiento de otras personas. "No me preocupa que conduzcas, me preocupo por todos los demás en la carretera".“Nuestros autos ven el mundo, entienden el mundo. Entienden las intenciones de todos los participantes en movimiento en el entorno: automóviles, peatones, ciclistas, motociclistas. No es suficiente simplemente rastrear un objeto en el espacio. Debe comprender lo que hace ", dice Dmitry Dolgov, vicepresidente de desarrollo de Waymo. - Esta es una tarea clave en la creación de un robot robusto experto y seguro. "Tal simulación, tal comprensión del comportamiento de otros participantes en el movimiento, es muy similar a modelar su comportamiento en una simulación".Hay una diferencia clave: en el mundo real, necesitaría datos nuevos y en tiempo real para procesar sobre la marcha y convertir el script en una máquina amigable para la máquina, y luego navegar por ella. Pero ahora, después de varios años de trabajo en este proyecto, confían en que pueden hacerlo, porque "realizaron un montón de controles que demuestran que podemos reconocer una gran cantidad de opciones para peatones", dice Stout.Entonces, en la mayoría de las situaciones, simplemente se saltan la etapa de reconocimiento de objetos. En lugar de alimentar los datos brutos del automóvil que debería reconocer como peatón, simplemente le dicen: hay un peatón.En la intersección, Kolyarova complica la vida del automóvil. Presiona V, una tecla de acceso rápido para el vehículo, y aparece un nuevo objeto en Carcraft. Luego, con el mouse en el menú de la derecha, selecciona mi favorito entre los tipos de autos: bird_squirrel.Se puede forzar a varios objetos a actuar de acuerdo con la lógica preconfigurada en Waymo o la lógica programada en Carcraft para que se muevan de una manera muy específica; esto es necesario para probar diferentes tipos de comportamiento. "Existe un amplio rango entre el control total sobre la situación y la simple disposición de los objetos en la escena, después de lo cual puedes simplemente ejecutarlos a todos", dice Stout.A medida que se configura la base de la situación, puede comenzar a verificar todas las opciones importantes que contiene. Suponga que desea verificar en una sola intersección la secuencia diferente de llegada de automóviles, peatones y ciclistas, la hora diferente en que se detienen, su velocidad y cualquier otra cosa. Luego, simplemente puede establecer intervalos razonables para los parámetros correspondientes y perder todas las combinaciones de esta situación.Lo llaman borroso, y en este caso, se crearon automáticamente 800 situaciones en nuestra intersección. El resultado es un hermoso diagrama de encaje, y todos los programadores pueden verificarlo y ver cómo las diferentes combinaciones de variables afectan la ruta elegida por el robot.
No es sorprendente que lo más difícil sea simular el comportamiento de otras personas. "No me preocupa que conduzcas, me preocupo por todos los demás en la carretera".“Nuestros autos ven el mundo, entienden el mundo. Entienden las intenciones de todos los participantes en movimiento en el entorno: automóviles, peatones, ciclistas, motociclistas. No es suficiente simplemente rastrear un objeto en el espacio. Debe comprender lo que hace ", dice Dmitry Dolgov, vicepresidente de desarrollo de Waymo. - Esta es una tarea clave en la creación de un robot robusto experto y seguro. "Tal simulación, tal comprensión del comportamiento de otros participantes en el movimiento, es muy similar a modelar su comportamiento en una simulación".Hay una diferencia clave: en el mundo real, necesitaría datos nuevos y en tiempo real para procesar sobre la marcha y convertir el script en una máquina amigable para la máquina, y luego navegar por ella. Pero ahora, después de varios años de trabajo en este proyecto, confían en que pueden hacerlo, porque "realizaron un montón de controles que demuestran que podemos reconocer una gran cantidad de opciones para peatones", dice Stout.Entonces, en la mayoría de las situaciones, simplemente se saltan la etapa de reconocimiento de objetos. En lugar de alimentar los datos brutos del automóvil que debería reconocer como peatón, simplemente le dicen: hay un peatón.En la intersección, Kolyarova complica la vida del automóvil. Presiona V, una tecla de acceso rápido para el vehículo, y aparece un nuevo objeto en Carcraft. Luego, con el mouse en el menú de la derecha, selecciona mi favorito entre los tipos de autos: bird_squirrel.Se puede forzar a varios objetos a actuar de acuerdo con la lógica preconfigurada en Waymo o la lógica programada en Carcraft para que se muevan de una manera muy específica; esto es necesario para probar diferentes tipos de comportamiento. "Existe un amplio rango entre el control total sobre la situación y la simple disposición de los objetos en la escena, después de lo cual puedes simplemente ejecutarlos a todos", dice Stout.A medida que se configura la base de la situación, puede comenzar a verificar todas las opciones importantes que contiene. Suponga que desea verificar en una sola intersección la secuencia diferente de llegada de automóviles, peatones y ciclistas, la hora diferente en que se detienen, su velocidad y cualquier otra cosa. Luego, simplemente puede establecer intervalos razonables para los parámetros correspondientes y perder todas las combinaciones de esta situación.Lo llaman borroso, y en este caso, se crearon automáticamente 800 situaciones en nuestra intersección. El resultado es un hermoso diagrama de encaje, y todos los programadores pueden verificarlo y ver cómo las diferentes combinaciones de variables afectan la ruta elegida por el robot. Tabla de eleccionesEl desafío es analizar todas estas opciones y simulaciones para encontrar datos interesantes que puedan ayudar a los programadores a mejorar su programa de manejo. El primer paso puede ser: ¿se atascó el automóvil? Si es así, entonces esta situación se vuelve interesante para trabajar con ella.La animación a continuación muestra tal situación. La compleja intersección que existe en realidad en Mountain View. Al girar a la izquierda, el automóvil vio a un ciclista que apareció, por lo que se detuvo en el camino. Los programadores tomaron esta clase de problemas y rediseñaron el software para que respondiera correctamente a la situación. El video muestra la situación real, y luego su simulación. Donde divergen, puede ver que la máquina simulada continúa moviéndose, y luego aparece un cuadro punteado con la inscripción "shadow_vehicle_pose". El cuadro discontinuo muestra lo que sucedió en la realidad. Para los empleados de Waymo, esta es la visualización más clara del progreso.
Tabla de eleccionesEl desafío es analizar todas estas opciones y simulaciones para encontrar datos interesantes que puedan ayudar a los programadores a mejorar su programa de manejo. El primer paso puede ser: ¿se atascó el automóvil? Si es así, entonces esta situación se vuelve interesante para trabajar con ella.La animación a continuación muestra tal situación. La compleja intersección que existe en realidad en Mountain View. Al girar a la izquierda, el automóvil vio a un ciclista que apareció, por lo que se detuvo en el camino. Los programadores tomaron esta clase de problemas y rediseñaron el software para que respondiera correctamente a la situación. El video muestra la situación real, y luego su simulación. Donde divergen, puede ver que la máquina simulada continúa moviéndose, y luego aparece un cuadro punteado con la inscripción "shadow_vehicle_pose". El cuadro discontinuo muestra lo que sucedió en la realidad. Para los empleados de Waymo, esta es la visualización más clara del progreso. Pero deben buscar no solo aquellos casos en los que el automóvil está atascado. Pueden buscar situaciones en las que el tiempo dedicado a la solución fue demasiado largo o el frenado fue demasiado lento. Todo lo que los programadores afinan y estudian, lo simulan para encontrar problemas.Stout y el jefe del Departamento de software de la deuda especificaron específicamente que la simulación tiene tres propiedades principales. En primer lugar, en la simulación, puede conducir mucho más millas de lo que sería posible con un parque físico; Y la experiencia es buena. En segundo lugar, estas millas se centran en interacciones interesantes y complejas, y no solo en millas aburridas. Tercero, los ciclos de desarrollo de software pueden ir mucho más rápido."El ciclo de repetición es extremadamente importante para nosotros, y el trabajo realizado en la simulación nos permite comprimirlo drásticamente", me dijo Dolgov. "Un ciclo que llevaría semanas trabajar con nosotros por primera vez, ahora pasa en minutos".¿Qué pasa con las manchas de aceite en las carreteras? Explotando neumáticos, pájaros extraños, agujeros del tamaño de una concha y la locura general de los conductores. ¿Están fingiendo ser? La deuda era segura. Él dice que podrían hacerlo, pero "¿cuánto necesitas para aumentar la precisión del simulador?"Los beneficios de los mundos virtuales de Carcraft no son que sean imágenes hermosas, ideales y fotorrealistas del mundo real. Su beneficio es que reflejan el mundo real en aspectos importantes para los robomobiles y les permiten conducir miles de millones de millas más de lo que permitirían los controles físicos. El software de la máquina host no toma decisiones, en un mundo similar al real, para él todo es como si tomara decisiones en el mundo real.Y este sistema funciona. El Departamento de Transporte de California exige que las compañías informen cuántas de sus robomóviles han conducido millas en un año y cuántas veces los conductores tienen que tomar el control. Waymo no solo condujo tres órdenes de magnitud más millas que nadie, sino que la cantidad de casos de transferencia de control está disminuyendo rápidamente.Waymo rodó 635,868 millas autónomas desde diciembre de 2015 hasta noviembre de 2016. En estas millas, las transferencias de control ocurrieron 124 veces, en promedio una vez cada 5000 millas, o 0.2 transferencias por 1000 millas. En el año anterior, alcanzaron 424,331 millas autónomas, tuvieron 272 turnos, en promedio cada 890 millas, o 0.8 turnos por 1000 millas.Todos, por supuesto, dicen que estas cifras no se pueden comparar, pero seamos realistas: estos son los mejores indicadores para California. Todo el resto en total golpeó una fuerza de 20,000 millas.El enfoque de Waymo no sorprende a los expertos de terceros. "Ahora puede medir la sofisticación del equipo que trabaja en autonomía, ya sea un dron o un automóvil, por la seriedad con la que toman la simulación", dice Chris Dixon, capitalista de riesgo de Andreessen Horowitz, quien invirtió en la compañía de simulación Improbable, una compañía de simulación. "Y Waymo está en la cima, son los más sofisticados".Le pregunté al director de innovación de Allstate Insurance, Sunil Chintakindi, sobre Waymo. "Sin una infraestructura de simulación confiable, no se pueden crear máquinas con los niveles más altos de autonomía", dijo. "Ni siquiera hablaría con alguien que piense lo contrario".Otros investigadores eligen caminos similares. Huey Peng es Director de Mcity, el Laboratorio de Transporte Autónomo y Unificado de la Universidad de Michigan. Peng dice que cualquier sistema que funcione para robomobiles será "una combinación de simulación del 99%, controles estructurales cuidadosamente diseñados y cierta cantidad de controles en las carreteras".Junto con el estudiante graduado, propusieron un sistema para combinar millas reales recorridas con una simulación para acelerar significativamente los controles. El sistema es un poco como la implementación de Waymo. "Sugerimos eliminar todas las etapas aburridas de conducir y dejarlas interesantes", dice Peng. "Eso te permitirá acelerar cientos de veces: mil millas se convierten en un millón".El alcance, la organización y la actividad del proyecto Waymo son sorprendentes. Describí las verificaciones estructurales realizadas por Google y Pengu, incluidas 20,000 situaciones que entraron en la simulación de las verificaciones estructurales realizadas por el equipo en el Castillo. Al principio no me escuchó y comenzó a decir que "estas 2000 situaciones son una cifra impresionante". Lo corregí: "Fueron 20,000 simulaciones". El estaba en silencio. "20,000", dijo, considerándolo. "Esto es impresionante".De hecho, todas estas 20,000 situaciones representan una pequeña fracción del número total de situaciones verificadas por Waymo. Estos son solo los resultados del procesamiento de verificaciones estructurales. Tienen incluso más situaciones tomadas de conducir en carreteras reales y solo de sus cabezas."Lo hacen bastante bien", dijo Peng. "Están muy por delante de todos los demás en el desarrollo del cuarto nivel", utilizando la reducción de la jerga para un automóvil totalmente autónomo.Peng expresó la posición de los fabricantes de automóviles tradicionales. Dijo que están tratando de lograr algo completamente diferente. No apuntan a la autonomía total, pero intentan agregar tecnologías que ayuden a conducir, "ganar algo de dinero" y luego avanzar más hacia la autonomía total. Waymo no se puede comparar con los recursos y la libertad corporativa para colocar un telémetro láser de $ 70,000 en una máquina con un fabricante como Chevy, cuyos autos no deberían costar más de $ 40,000 para ser vendidos en el mercado."GM, Ford, Toyota y el resto dicen: 'Permítanme reducir las colisiones y las bajas y aumentar la seguridad para el consumidor masivo'. Su objetivo es completamente diferente, dice Peng. "Necesitamos pensar en millones de automóviles, no solo en unos pocos miles".Y Waymo enfrentó más obstáculos en la carrera por la autonomía total de lo que estaba acostumbrada, por ejemplo, Tesla. Chris Gerde es director del Centro de Investigación Automotriz de Stanford. Hace dieciocho meses le dijo a mi colega que Waymo "tiene una mejor comprensión de la profundidad de los problemas y cuánto más nos hemos acercado a resolverlos". Cuando le pregunté la semana pasada si todavía lo cree, dijo "mucho ha cambiado "."Los fabricantes de automóviles como Ford y GM exhibieron sus autos y construyeron sus conjuntos de datos de carretera", dice. - Tesla recopiló una gran cantidad de datos del desarrollo del piloto automático, estudiando cómo se comporta el sistema precisamente en las condiciones en que se encuentran sus clientes. Su capacidad para probar algoritmos silenciosamente y su base de máquinas en rápido crecimiento representan un campo de pruebas increíble ”.Gerde dice que en el mundo de las simulaciones, vio a varios competidores con programas bastante serios. "Estoy seguro de que hay muchas posibilidades de simulación, pero he visto varios ejemplos bastante buenos. Waymo ya no se ve tan único. Realmente tenían una desventaja, pero hoy en día hay muchos grupos que experimentan enfoques similares. Así que ahora la pregunta es quién lo hará mejor ".Esto no es solo una especie de demostración del funcionamiento de una red neuronal que parece un cerebro. Este es un gran avance en el desarrollo de IA, incluso para la compañía Alphabet, conocida por sus agresivas políticas de IA. Esto no es Google Photos, donde el error no vale nada. Este es un sistema que vivirá e interactuará de manera completamente independiente con el mundo de las personas. Ella comprenderá nuestras reglas, comunicará sus deseos, se volverá clara a nuestros ojos y mentes.Waymo parece haberse alejado un poco de trabajar con la equitación como una habilidad técnica específica, y está trabajando con ella como una forma de actividad social humana. ¿Qué significa conducir "normalmente" y no solo "legalmente"? ¿Cómo enseñar esta IA?Resulta que para crear una IA así, no solo necesitas una gran cantidad de datos y el arte de los programadores. Estas son condiciones necesarias pero insuficientes. Una parte de esto es necesaria para que las personas se sincronicen con los autos, entiendan el mundo tal como son. Los conductores en el Castillo entienden lo que significa ser una de estas máquinas, ver y tomar decisiones como son. Tal vez esto funcione en ambos sentidos: cuanto mejor entiendan las máquinas, mejor entenderán las máquinas.La memoria de la rotonda en Austin se convierte en parte del Castillo, se convierte en el conjunto de datos del automóvil robot, se convierte en la situación para Carcraft se convierte en la red de simulaciones, se convierte en el nuevo software que finalmente regresa al automóvil robot físico que se dirige a esta rotonda en Texas.Incluso dentro de la abstracción poligonal de la simulación utilizada por la IA para reconocer el mundo, hay rastros de sueños humanos, partes de recuerdos, sentimientos de conductores. Estos componentes no son errores y puntos que deben eliminarse, sino las partes necesarias de un sistema que puede revolucionar el transporte, en las ciudades y, en el infierno, en casi todas partes.
Pero deben buscar no solo aquellos casos en los que el automóvil está atascado. Pueden buscar situaciones en las que el tiempo dedicado a la solución fue demasiado largo o el frenado fue demasiado lento. Todo lo que los programadores afinan y estudian, lo simulan para encontrar problemas.Stout y el jefe del Departamento de software de la deuda especificaron específicamente que la simulación tiene tres propiedades principales. En primer lugar, en la simulación, puede conducir mucho más millas de lo que sería posible con un parque físico; Y la experiencia es buena. En segundo lugar, estas millas se centran en interacciones interesantes y complejas, y no solo en millas aburridas. Tercero, los ciclos de desarrollo de software pueden ir mucho más rápido."El ciclo de repetición es extremadamente importante para nosotros, y el trabajo realizado en la simulación nos permite comprimirlo drásticamente", me dijo Dolgov. "Un ciclo que llevaría semanas trabajar con nosotros por primera vez, ahora pasa en minutos".¿Qué pasa con las manchas de aceite en las carreteras? Explotando neumáticos, pájaros extraños, agujeros del tamaño de una concha y la locura general de los conductores. ¿Están fingiendo ser? La deuda era segura. Él dice que podrían hacerlo, pero "¿cuánto necesitas para aumentar la precisión del simulador?"Los beneficios de los mundos virtuales de Carcraft no son que sean imágenes hermosas, ideales y fotorrealistas del mundo real. Su beneficio es que reflejan el mundo real en aspectos importantes para los robomobiles y les permiten conducir miles de millones de millas más de lo que permitirían los controles físicos. El software de la máquina host no toma decisiones, en un mundo similar al real, para él todo es como si tomara decisiones en el mundo real.Y este sistema funciona. El Departamento de Transporte de California exige que las compañías informen cuántas de sus robomóviles han conducido millas en un año y cuántas veces los conductores tienen que tomar el control. Waymo no solo condujo tres órdenes de magnitud más millas que nadie, sino que la cantidad de casos de transferencia de control está disminuyendo rápidamente.Waymo rodó 635,868 millas autónomas desde diciembre de 2015 hasta noviembre de 2016. En estas millas, las transferencias de control ocurrieron 124 veces, en promedio una vez cada 5000 millas, o 0.2 transferencias por 1000 millas. En el año anterior, alcanzaron 424,331 millas autónomas, tuvieron 272 turnos, en promedio cada 890 millas, o 0.8 turnos por 1000 millas.Todos, por supuesto, dicen que estas cifras no se pueden comparar, pero seamos realistas: estos son los mejores indicadores para California. Todo el resto en total golpeó una fuerza de 20,000 millas.El enfoque de Waymo no sorprende a los expertos de terceros. "Ahora puede medir la sofisticación del equipo que trabaja en autonomía, ya sea un dron o un automóvil, por la seriedad con la que toman la simulación", dice Chris Dixon, capitalista de riesgo de Andreessen Horowitz, quien invirtió en la compañía de simulación Improbable, una compañía de simulación. "Y Waymo está en la cima, son los más sofisticados".Le pregunté al director de innovación de Allstate Insurance, Sunil Chintakindi, sobre Waymo. "Sin una infraestructura de simulación confiable, no se pueden crear máquinas con los niveles más altos de autonomía", dijo. "Ni siquiera hablaría con alguien que piense lo contrario".Otros investigadores eligen caminos similares. Huey Peng es Director de Mcity, el Laboratorio de Transporte Autónomo y Unificado de la Universidad de Michigan. Peng dice que cualquier sistema que funcione para robomobiles será "una combinación de simulación del 99%, controles estructurales cuidadosamente diseñados y cierta cantidad de controles en las carreteras".Junto con el estudiante graduado, propusieron un sistema para combinar millas reales recorridas con una simulación para acelerar significativamente los controles. El sistema es un poco como la implementación de Waymo. "Sugerimos eliminar todas las etapas aburridas de conducir y dejarlas interesantes", dice Peng. "Eso te permitirá acelerar cientos de veces: mil millas se convierten en un millón".El alcance, la organización y la actividad del proyecto Waymo son sorprendentes. Describí las verificaciones estructurales realizadas por Google y Pengu, incluidas 20,000 situaciones que entraron en la simulación de las verificaciones estructurales realizadas por el equipo en el Castillo. Al principio no me escuchó y comenzó a decir que "estas 2000 situaciones son una cifra impresionante". Lo corregí: "Fueron 20,000 simulaciones". El estaba en silencio. "20,000", dijo, considerándolo. "Esto es impresionante".De hecho, todas estas 20,000 situaciones representan una pequeña fracción del número total de situaciones verificadas por Waymo. Estos son solo los resultados del procesamiento de verificaciones estructurales. Tienen incluso más situaciones tomadas de conducir en carreteras reales y solo de sus cabezas."Lo hacen bastante bien", dijo Peng. "Están muy por delante de todos los demás en el desarrollo del cuarto nivel", utilizando la reducción de la jerga para un automóvil totalmente autónomo.Peng expresó la posición de los fabricantes de automóviles tradicionales. Dijo que están tratando de lograr algo completamente diferente. No apuntan a la autonomía total, pero intentan agregar tecnologías que ayuden a conducir, "ganar algo de dinero" y luego avanzar más hacia la autonomía total. Waymo no se puede comparar con los recursos y la libertad corporativa para colocar un telémetro láser de $ 70,000 en una máquina con un fabricante como Chevy, cuyos autos no deberían costar más de $ 40,000 para ser vendidos en el mercado."GM, Ford, Toyota y el resto dicen: 'Permítanme reducir las colisiones y las bajas y aumentar la seguridad para el consumidor masivo'. Su objetivo es completamente diferente, dice Peng. "Necesitamos pensar en millones de automóviles, no solo en unos pocos miles".Y Waymo enfrentó más obstáculos en la carrera por la autonomía total de lo que estaba acostumbrada, por ejemplo, Tesla. Chris Gerde es director del Centro de Investigación Automotriz de Stanford. Hace dieciocho meses le dijo a mi colega que Waymo "tiene una mejor comprensión de la profundidad de los problemas y cuánto más nos hemos acercado a resolverlos". Cuando le pregunté la semana pasada si todavía lo cree, dijo "mucho ha cambiado "."Los fabricantes de automóviles como Ford y GM exhibieron sus autos y construyeron sus conjuntos de datos de carretera", dice. - Tesla recopiló una gran cantidad de datos del desarrollo del piloto automático, estudiando cómo se comporta el sistema precisamente en las condiciones en que se encuentran sus clientes. Su capacidad para probar algoritmos silenciosamente y su base de máquinas en rápido crecimiento representan un campo de pruebas increíble ”.Gerde dice que en el mundo de las simulaciones, vio a varios competidores con programas bastante serios. "Estoy seguro de que hay muchas posibilidades de simulación, pero he visto varios ejemplos bastante buenos. Waymo ya no se ve tan único. Realmente tenían una desventaja, pero hoy en día hay muchos grupos que experimentan enfoques similares. Así que ahora la pregunta es quién lo hará mejor ".Esto no es solo una especie de demostración del funcionamiento de una red neuronal que parece un cerebro. Este es un gran avance en el desarrollo de IA, incluso para la compañía Alphabet, conocida por sus agresivas políticas de IA. Esto no es Google Photos, donde el error no vale nada. Este es un sistema que vivirá e interactuará de manera completamente independiente con el mundo de las personas. Ella comprenderá nuestras reglas, comunicará sus deseos, se volverá clara a nuestros ojos y mentes.Waymo parece haberse alejado un poco de trabajar con la equitación como una habilidad técnica específica, y está trabajando con ella como una forma de actividad social humana. ¿Qué significa conducir "normalmente" y no solo "legalmente"? ¿Cómo enseñar esta IA?Resulta que para crear una IA así, no solo necesitas una gran cantidad de datos y el arte de los programadores. Estas son condiciones necesarias pero insuficientes. Una parte de esto es necesaria para que las personas se sincronicen con los autos, entiendan el mundo tal como son. Los conductores en el Castillo entienden lo que significa ser una de estas máquinas, ver y tomar decisiones como son. Tal vez esto funcione en ambos sentidos: cuanto mejor entiendan las máquinas, mejor entenderán las máquinas.La memoria de la rotonda en Austin se convierte en parte del Castillo, se convierte en el conjunto de datos del automóvil robot, se convierte en la situación para Carcraft se convierte en la red de simulaciones, se convierte en el nuevo software que finalmente regresa al automóvil robot físico que se dirige a esta rotonda en Texas.Incluso dentro de la abstracción poligonal de la simulación utilizada por la IA para reconocer el mundo, hay rastros de sueños humanos, partes de recuerdos, sentimientos de conductores. Estos componentes no son errores y puntos que deben eliminarse, sino las partes necesarias de un sistema que puede revolucionar el transporte, en las ciudades y, en el infierno, en casi todas partes.