Hola geektimes!
Entrada
Todos sabemos desde hace mucho tiempo que los robots son nuestro futuro. Hay muchas áreas de robótica. Desarrollos militares, robots sociales, entretenidos y de trabajo.
Pero esta vez quiero contar en nombre del equipo del Colegio en MIREA sobre el componente competitivo, y exactamente sobre los robots de los sumoistas.
Un poco sobre nuestro equipo
Existimos desde 2014. Los ganadores y ganadores de la mayoría de las competiciones son Robofinist, Robofest, MIPT Spartakiad y torneos más pequeños, y también somos campeones absolutos de Rusia para 2016-2017 en la nominación de mini sumo.
¿Quiénes son estos robots de sumo?
Inicialmente, cuando nos enteramos de tales competiciones, los luchadores de sumo se hicieron principalmente de lego. Pero esta es una idea bastante mala, más sobre eso más adelante.
Por el momento, la sumoísta correcta se describe de manera muy simple: una pieza de hierro completamente autónoma sobre ruedas, con cerebro y un par de sensores, que saca una pieza de hierro similar del anillo.
Hay 4 tipos de ellos:
1. Mega-Sumoist
2. Mini Sumoist
3. Micro-sumoista
4. Nano-Sumoist
Todos difieren no solo externamente, sino también internamente.
Mega son los robots más grandes y peligrosos. Peso máximo de hasta 3 kg, la capacidad de colocar varias "ventosas", lo que no está permitido hacer con otros robots.
Mini - robots pequeños y agradables de hasta 500 gramos de 10 por 10 cm. No es difícil de soldar, es fácil de instalar y montar. Son la nominación más popular en sumo.
Micro y nano - mini miniaturas. Micro 5 por 5 por 5, nano 2.5 por 2.5 por 2.5. Es difícil soldar y recoger los detalles. Más popular que el mega sumo.
En
esta página puede leer las reglas de la competencia con más detalle. (agregado)
¿Cuál es la esencia del robo sumo?
El objetivo principal: empujar al enemigo más allá de los límites de un polígono redondo. El que primero toca cualquier objeto externo pierde. Parece que lo difícil es simplemente expulsar al enemigo? Y la dificultad es que los robots son completamente autónomos y aparecen cada vez más estrategias nuevas que son cada vez más difíciles de manejar.
Video con nuestros robots (agregado):
Robofest 2016 (robot con relámpago, robot con bandera pirata, robot negro bajo sólido, robot negro alto sin imagen)
Robo picnic 2017 (solo nuestros robots, excepto un robot rectangular con sensores de sonido)
Sin participación:
Robotex 2016Campeonato Letón de Robótica 2017RoboChallenge 2016 Robot CompetitionUna pequeña descripción de las tácticas de búsqueda de enemigos.¿De qué están hechos?
Volvamos al lego. Lo más probable es que muchos de ustedes hayan intentado hacer algo con un constructor de Lego programable, o al menos hayan visto cómo hacerlo. Incluso hay una nominación separada para tales robots de 15 por 15, pero terriblemente aburrida y adecuada solo para principiantes o pequeños robots. En comparación con las muestras caseras, esta pierde en todo, excepto en la complejidad del ensamblaje.
El primero es de baja velocidad. En segundo lugar, enormes tamaños. En tercer lugar, la baja velocidad de respuesta de los sensores. Y también el controlador en sí deja mucho que desear.
Detalles sobre montaje y montaje
Los luchadores de sumo que componen la competencia están haciendo arduino. Utilizan placas de textolita, sensores de soldadura, un controlador, un controlador, etc. También hay una amplia selección de sensores para detectar a un adversario, pero se deben usar infrarrojos o láser, porque Los sonares son muy lentos y voluminosos. Por supuesto, se necesitan motores y ruedas para que el robot pueda moverse. Puede ponerles un número ilimitado, pero la práctica muestra que el robot se monta mejor en dos ruedas ubicadas en la parte trasera. Y, por supuesto, un robot no puede vivir sin un cubo y un gancho. El cubo es solo un estuche, una envoltura y protección para el tablero y los elementos. Muy a menudo, acero o hierro. Los remolques están hechos de cuchillas para cuchillos de escritorio, pero hay especímenes con un enfoque no estándar, por ejemplo, una regla de madera afilada o algodón, pero este enfoque es poco útil.
Lo más difícil (además de la programación) para diseñar un robot.Pero especialmente para aquellos que desean participar, pero aún no saben por dónde comenzar, estamos listos para compartir el rastro del robot, que es un ganador del premio de la Spartakiad MIPT 2016.
PD Hecho en
SprintLayoutEsto se llama la primera etapa: la colocación de motores y sensores. También puede observar aquí dos sensores pequeños frente a la pastilla, por lo que estos son los sensores de línea.
Se utilizan para detectar una franja blanca en el vertedero para evitar caerse accidentalmente fuera del anillo, pero no son un componente obligatorio y, de hecho, no se usan con mucha frecuencia. Las altas velocidades a menudo no le permiten detenerse a tiempo.
Y aquí el controlador, el controlador, los interruptores y el conector de la batería ya están aplicados.
Solo queda imprimir la traza y transferirla a la PCB, y luego rastrear las pistas.
Así es como se ve en un tablero terminado:
Listo para lanzar robot:
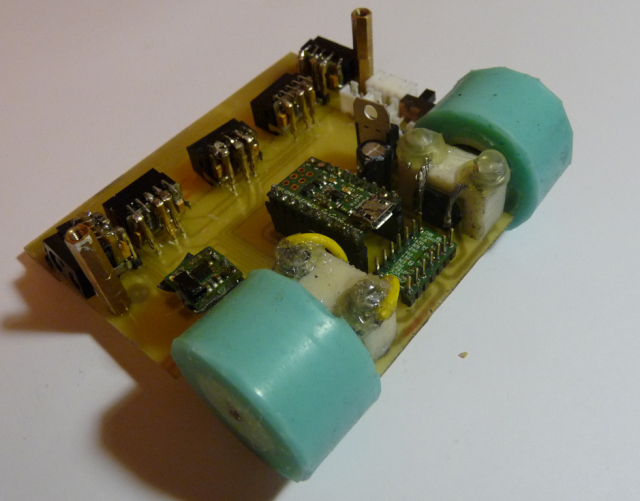
Como puede ver, no hay nada particularmente complicado aquí. Sobre los problemas a continuación.
Pasemos a la programación
La forma más fácil es usar arduino o controladores compatibles con arduino. Además, Arduino IDE para ayudarnos. Según el esquema estándar, el robot tiene 5 sensores. Entonces los estados pueden ser
Excluimos la situación cuando los sensores laterales ven al enemigo simultáneamente (porque esto no puede suceder, y si sucede, entonces hay un mal funcionamiento en uno de los sensores), así como una situación en la que los sensores laterales y dos delanteros dan 0 (es decir, ver), porque esto tampoco puede ser, o la posibilidad es muy pequeña.
Para hacerlo ir al enemigo, solo necesitamos instalar los pines, aplicar voltaje a los motores y leer las lecturas del sensor:
Código de robot// int pin_left=10; int pin_center_left=11; int pin_center_right=4; int pin_center=12; int pin_right=7; // int pin_motor_left_forward=9; int pin_motor_left_back=6; int pin_motor_right_forward=3; int pin_motor_right_back=5; // int cl,cc,cr,l,r; // void GLAZ() { cl = digitalRead(pin_center_left); cc = digitalRead(pin_center); cr = digitalRead(pin_center_right); l = digitalRead(pin_left); r = digitalRead(pin_right); } // , 0 255 void MOVE( int a, int b ) { if(a<0) { digitalWrite(pin_motor_left_forward,LOW); analogWrite(pin_motor_left_back,0-a); } else { analogWrite(pin_motor_left_forward,a); digitalWrite(pin_motor_left_back,LOW); } if(b<0) { digitalWrite(pin_motor_right_forward,LOW); analogWrite(pin_motor_right_back,0-b); } else { digitalWrite(pin_motor_right_back,LOW); analogWrite(pin_motor_right_forward,b); } } void setup() { pinMode (pin_center,INPUT);// pinMode (pin_right, INPUT);// pinMode (pin_left,INPUT);// pinMode (pin_center_right, INPUT);// pinMode (pin_center_left,INPUT);// pinMode (pin_line_left, INPUT); pinMode (pin_line_right, INPUT); pinMode (pin_start,INPUT);// pinMode (13,OUTPUT);// digitalWrite(13,HIGH); pinMode (pin_motor_left_back, OUTPUT);// pinMode (pin_motor_right_forward, OUTPUT);// pinMode (pin_motor_right_back, OUTPUT);// pinMode (pin_motor_left_forward,OUTPUT);// // while(!digitalRead(pin_start))continue; MOVE(200,200); } void loop() { GLAZ(); if(l && r) { if( (cl + cc + cr) < 2 || !cc ){ MOVE(255,255); } if( cc ) { if(!cl && cr) MOVE(0-180,180); if(cl && !cr) MOVE(180,0-180); } } else if( cc + cr + cl == 3 ) { if(!l && r) MOVE(0-200,200); if(!r && l) MOVE(200,0-200); } else if(cc) { if(!l && !cl && cr && r) MOVE(0-150,150); if(l && cl && !cr && !r) MOVE(150,0-150); } if(!digitalRead(pin_start))while(1){MOVE(0,0);} }
Solo tienes que mejorar el código.
Importante!Los sensores devuelven 1 si no ven nada y 0 si hay un obstáculo.
Después de descargar el código a través de usb, el robot está listo para competir.
Vale la pena considerar
En primer lugar, estos son los elementos. Los sensores que utilizamos (Sharp 340) son raros o nada. Por lo tanto, si es posible, debe tomar mucho de una vez o encontrar un análogo que sea adecuado para los parámetros.
En segundo lugar, es imposible infligir daño crítico a un robot enemigo o usar imanes, por ejemplo, para recoger. Esto nos limita un poco a la hora de elegir medios para la lucha.
Además, no te olvides de las ruedas. Las curvas, finas y deslizantes no funcionarán, simplemente no podrá maniobrar y el momento de fuerza no es suficiente. Asegúrese de probar el caucho.
Cuando trabaje con motores, tenga en cuenta que tendrán que trabajar bajo la carga máxima y se quemarán con bastante frecuencia.
También tiene sentido fabricar baterías extraíbles, ya que El robot se descarga bastante rápido y tarda mucho en cargarse.
Lista de compras necesarias:
1. Soldador, soldadura, fundente (opcional)
2. Tableros de textolita (para grabar, necesita cerrar todas las pistas, luego ponerlo todo en una solución de peróxido de hidrógeno + ácido cítrico + sal durante varias horas, y luego arrancar el papel, por ejemplo, debajo del cual se ocultaron las pistas)
3. Sharp 340 sensores
4. Motores, elija probar, cuanto más rpm, mejor.
Vale la pena elegir algo de esto:
polulu. (agregado)
5. Baterías (le aconsejo que tome polímero de litio) + estación de carga
6. Llave (botón de interruptor, soldado a la placa) y elementos eléctricos (vea la imagen con trazado)
7. Conductor
8. Controlador, para empezar, puedes probar el micro Polulu A-Star 32u4 y completar el gestor de arranque Arduino
9. Chapa para vivienda
10. Un taladro para agujeros en el tablero
11. Lanzador y para ello el módulo de inicio
PD: Si te perdiste algo, escribe, lo corregiré.
Competencia
Las próximas competiciones se llevarán a cabo en San Petersburgo, Robofinist, por lo que ahora nos estamos preparando duro para ellas, y si quieres participar, debes hacer todo de manera clara y rápida.
Pero estas competiciones no son las únicas, hay muchas en Rusia, las más grandes se celebran en Moscú. Aproximadamente una vez al mes o dos, puedes experimentar la felicidad y competir.
Tales competiciones en el extranjero no son infrecuentes y también queremos llegar allí. Aquí hay un mapa aproximado de las competiciones mundiales:

Realmente esperamos que en nuestro país solo se desarrolle robo-sumo e invitamos a todos a participar en la creación de su propio robot.
Se ve muy épico cuando las piezas de algún robot salen volando.Estamos terminando este artículo introductorio para nosotros y les deseamos a todos éxito en robótica, ¡nos complacerá verte en las competiciones!