Hoy, se anunció la colaboración entre LIGO y Virgo (se publicará en PRL, el artículo se puede leer
aquí ) sobre una nueva detección de ondas gravitacionales (GW170814). Los primeros tres eventos (
uno ,
dos ,
tres ) se registraron en dos detectores LIGO en los EE. UU. El 1 de agosto, el detector europeo
avanzado VIRGO , ubicado en Italia, se unió a las observaciones. Y el 14 de agosto, los tres detectores detectaron ondas gravitacionales de la confluencia de dos agujeros negros.
 Evaluación de la ubicación de todas las fuentes registradas de ondas gravitacionales. GW170814 se define con mucha mayor precisión debido al uso de datos de tres detectores.
Evaluación de la ubicación de todas las fuentes registradas de ondas gravitacionales. GW170814 se define con mucha mayor precisión debido al uso de datos de tres detectores.Acerca de la señal
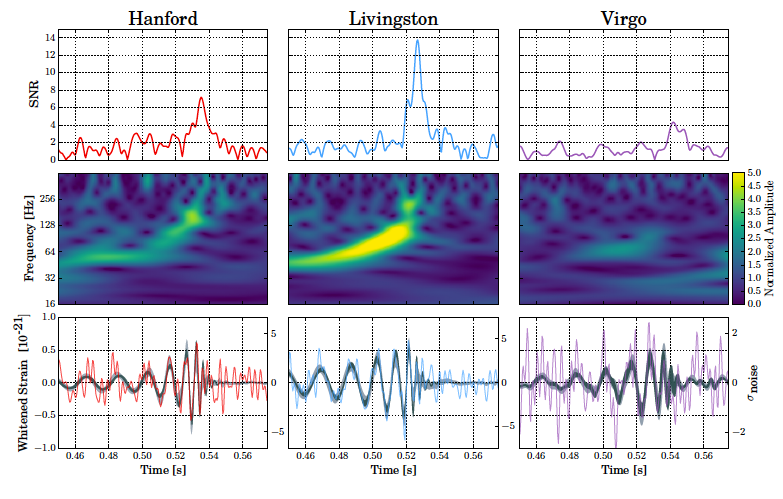 Fila superior: relación señal / ruido para tres detectores LIGO Hanford, LIGO Livingston y Virgo; fila central: cambio en el espectro de la señal con el tiempo; fila inferior: señal de tiempo (color), señal filtrada (gris) y modelo GR superpuesto (negro)
Fila superior: relación señal / ruido para tres detectores LIGO Hanford, LIGO Livingston y Virgo; fila central: cambio en el espectro de la señal con el tiempo; fila inferior: señal de tiempo (color), señal filtrada (gris) y modelo GR superpuesto (negro)Como en las tres veces anteriores, la fuente de la señal fue la fusión de los agujeros negros de las masas solares 25 y 30, a una distancia de aproximadamente 1.500 millones de años luz. Como resultado de la fusión, se formó un agujero negro con una masa de ~ 53 del solar, y ~ 2.7 masas solares se transformaron en ondas gravitacionales. La relación señal / ruido 18 da la probabilidad de una señal errónea 1 en 27 mil años. La señal en sí se correlaciona bien con GR, no hay sorpresas aquí. Lo más interesante es el hecho de la detección en tres detectores, y el conocimiento adicional que podemos obtener de esto.
Todos los hechos en la tableta Virgo avanzado

El detector europeo se encuentra cerca de Pisa, en Italia. La colaboración de Virgo reúne a científicos de Italia, Francia, Holanda, Polonia y Hungría. El detector en sí es similar a Advanced LIGO, pero con menos sensibilidad debido a varios factores: es algo más corto: la longitud del brazo del interferómetro es de 3 km, no 4, como en LIGO; las suspensiones de los espejos están hechas de metal (menos factor de calidad y más ruido térmico); el láser es menos poderoso; control de ruido y sistemas de filtrado en una etapa anterior de implementación.
Como resultado, la sensibilidad a altas frecuencias es varias veces menor que LIGO, y el detector en sí es bastante ruidoso. El ruido no filtrado de la fuente de alimentación a 50 Hz, así como los picos de diferentes señales de control, son claramente visibles en el espectro.
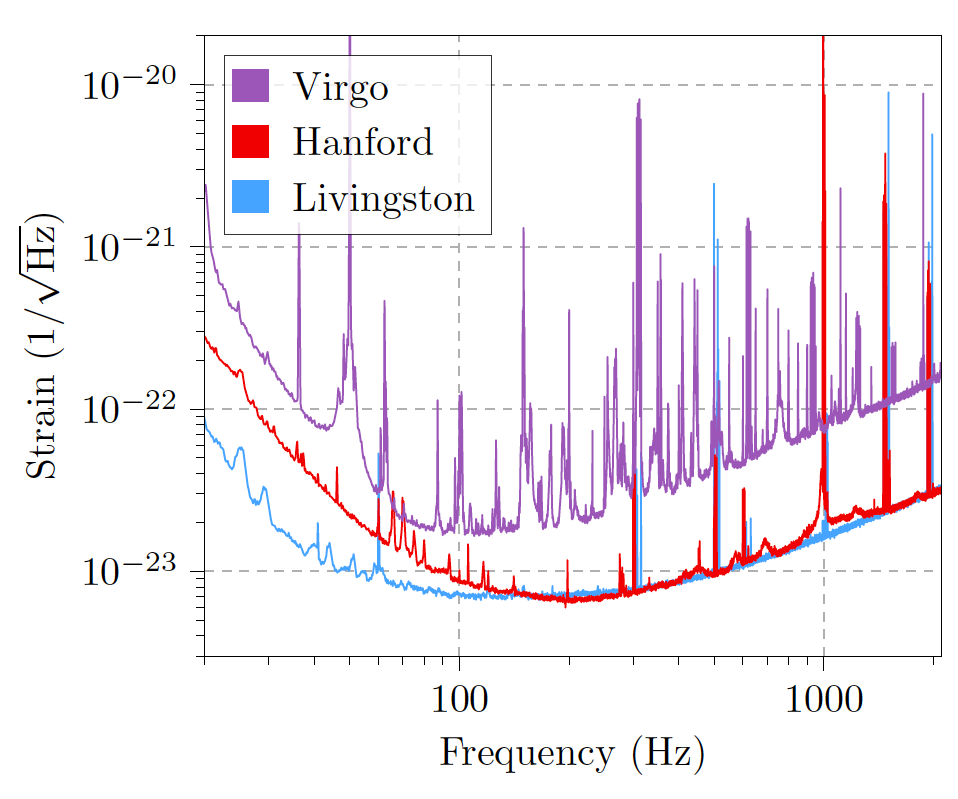 Densidad de ruido espectral de los detectores (con ruidos filtrados conocidos). Cuanto más bajo es el ruido, mayor es la sensibilidad del detector.
Densidad de ruido espectral de los detectores (con ruidos filtrados conocidos). Cuanto más bajo es el ruido, mayor es la sensibilidad del detector.¿Cómo ayuda un tercer detector con la detección?
La baja sensibilidad de Virgo hace que sea difícil reconocer la señal en ruido (como se puede ver en la segunda imagen del artículo), y sin LIGO esta señal no sería reconocida como suficientemente confiable. Sin embargo, en combinación con dos detectores LIGO, le permite triangular la ubicación de origen con mucha mayor precisión.
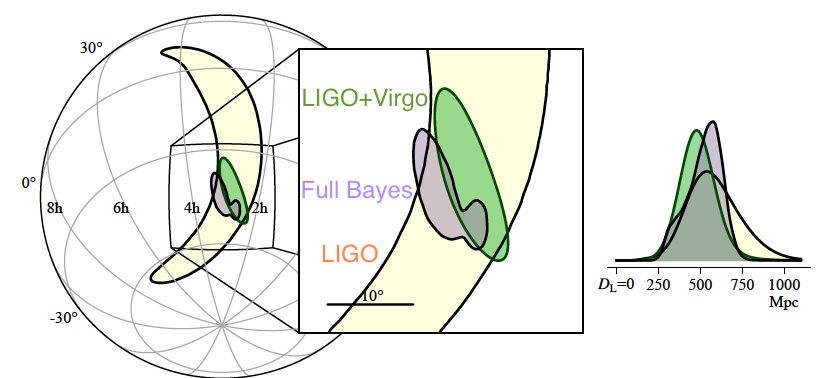 Región donde se encuentra la fuente de señal en el cielo: amarillo: solo LIGO, verde: LIGO y Virgo juntos, púrpura: estimación bayesiana de la ubicación, teniendo en cuenta todos los parámetros del modelo basados en LIGO y Virgo. Derecha: rango de fuente estimado.
Región donde se encuentra la fuente de señal en el cielo: amarillo: solo LIGO, verde: LIGO y Virgo juntos, púrpura: estimación bayesiana de la ubicación, teniendo en cuenta todos los parámetros del modelo basados en LIGO y Virgo. Derecha: rango de fuente estimado.Además, el tercer detector, ubicado en un plano diferente, permite hacer estimaciones para la polarización de las partículas agitadas. En la relatividad general, las ondas gravitacionales estiran y comprimen el espacio perpendicular a la dirección de su propagación, y hay dos polarizaciones (x y +)
 Imagen de Tom Dunne
Imagen de Tom DunneCuando el HW llega al detector estrictamente perpendicular al plano del interferómetro
y la orientación de los brazos coincide con la polarización, la amplitud de la señal alcanza un máximo. Si, por ejemplo, una onda polarizada x llega a un detector girado 45 grados con respecto a ella, ambos brazos se estiran de la misma manera y el patrón de interferencia en la salida no cambia, es decir, no habrá señal. Si hay dos detectores ubicados en diferentes planos, como LIGO y Virgo, la amplitud de la señal diferirá no solo debido a la pendiente relativa a la dirección de propagación, sino también debido a la diferente orientación del detector con respecto a la polarización. Esto hace posible estimar la polarización del HS. Ambos detectores LIGO están casi en el mismo plano y tienen una orientación cercana, pero Virgo se encuentra en un ángulo grande, lo que mejora en gran medida las estimaciones.
Un punto interesante aquí es el siguiente: las teorías métricas de la gravedad (y GR es solo una de ellas) permiten no solo tensor (como en GR), sino también polarización vectorial y escalar. La capacidad de medir la polarización nos permite verificar si realmente medimos la polarización del tensor. Para esto, los mismos cálculos para la fusión, como en el caso de GR, se realizan bajo el supuesto de polarización escalar o vectorial, y el resultado se compara con la señal real. Como resultado, GR resulta ser un modelo más probable que puramente escalar o puramente vectorial.
Que sigue
El segundo ciclo de observaciones se completa y los científicos procesan los datos. Los detectores están en servicio, y el próximo ciclo científico comenzará en algún lugar en un año. Durante este tiempo, aumentará la potencia de los láseres, se reducirán las pérdidas debidas a la dispersión de la luz y, posiblemente,
se agregará
luz comprimida .
Estén atentos!
Adiciones
- Hermosa simulación de fusión de BH
Hermosa imagen del cielo con fuentes de GV - Mapa interactivo del cielo con resortes
- En un artículo anterior y las discusiones al respecto, fui descuidado en cómo detectar la gravedad. Las ondas pueden ayudar a estimar la velocidad de su propagación.
DetallesEn particular, dije que el uso de dos detectores para la "triangulación" puede dar una buena evaluación de esta velocidad.
Esto no es cierto, si evalúa la velocidad simplemente por el retraso de la señal entre los dos detectores, solo puede limitar esta velocidad. La dirección de propagación usando dos detectores es difícil de determinar, e incluso usando datos de todas las detecciones, pero teniendo en cuenta todas las incertidumbres, la estimación se puede dar con una precisión del 50%. Incluso tres detectores ofrecen una precisión bastante baja, dentro de un porcentaje.
Aquí puedes leer más.La estimación que di proviene de la estimación de la dispersión de tumbas. ondas, asumiendo la validez de GR. Es decir, la detección nos permite decir con gran precisión que no hay dispersión de GW y, por lo tanto, de acuerdo con GR, su velocidad es igual a la velocidad de la luz.
Gracias a
Serge3leo por las correcciones.