
Además de nuestras vacaciones nativas el 12 de abril, Día de la Cosmonáutica, también hay una Semana Mundial del Espacio, que dura del 4 al 10 de octubre. Y recientemente, otro artículo de que los robots nos privarán del trabajo en el futuro nos ha llevado a preguntar sobre la situación con la robótica de la astronáutica. Bajo el corte: una breve descripción del uso de los robots espaciales modernos.
Como dice Wikipedia:
El robot es un dispositivo automático creado de acuerdo con los principios de reconocimiento, retención y movimiento de objetos en entornos nocivos y peligrosos, diseñado para llevar a cabo varios tipos de operaciones de producción, que funciona de acuerdo con un programa predefinido y recibe información sobre la posición y el estado del espacio circundante a través de sensores. El robot lleva a cabo independientemente la producción y otras operaciones auxiliares que reemplazan parcial o completamente el trabajo humano. En este caso, el robot puede tener una conexión con el operador para recibir comandos de él y actuar de forma independiente, de acuerdo con el programa establecido.
Bajo el término "robot" puede traer una gran cantidad de dispositivos. Y aquellos que usted mismo en la vida no consideraría un robot. Por ejemplo, los cajeros automáticos también son formalmente robots de "dinero": pueden aceptar y dar dinero automáticamente, reconocer el valor nominal de los billetes, clasificarlos por sus casetes internos y trabajar con tarjetas bancarias sin intervención humana. Incluso los manipuladores industriales se consideran robots, aunque su funcionalidad es mucho más pobre que la de los cajeros automáticos; pero, por otro lado, se mueven y, por lo tanto, en nuestras mentes son más consistentes con el orgulloso título de "robot".
Los robots comenzaron a participar en la exploración espacial antes que los humanos: la estación interplanetaria automática Luna-1 (AMS) se lanzó en 1959 (Gagarin voló en 1961) y se convirtió en la primera nave espacial en alcanzar la segunda velocidad espacial y el primer satélite artificial del Sol. Después de Luna-1, hasta la fecha, se han lanzado docenas de AMS al espacio, de los cuales los más famosos son los "hermanos" de los Voyagers. Quizás algunos satélites modernos también puedan considerarse robots. Todos los rovers planetarios, los nuestros y los rovers lunares chinos, los rovers estadounidenses, generalmente son robots de agua pura.
Clásicos sin edad
Si hablamos de las categorías de dispositivos que nos son familiares, entonces, desde el último, el más impresionante, podemos recordar cómo la nave espacial Rosetta trajo y dejó el vehículo de descenso Fila en el cometa Churyumov - Gerasimenko:

La Agencia Espacial Europea logró implementar un proyecto verdaderamente innovador: por primera vez en la historia, colocó con éxito una máquina artificial en un cometa. "Fila" tuvo que afianzarse en la superficie del núcleo con la ayuda de arpones, porque la gravedad allí es demasiado débil, pero no funcionaron, como el motor del cohete, que supuestamente presionaría el dispositivo hacia la superficie. Sin embargo, Fila se subió a un cometa y realizó una serie de estudios, incluido el análisis químico del suelo.
En 2013, el rover lunar chino Yutuk aterrizó en la luna. En realidad, lo más notable de él es que él: a) chino; b) el primer rover lunar en más de 40 años desde el fin del Lunokhod-2 soviético. Con los tres meses previstos de trabajo activo, Yutu dejó de moverse después de dos. Es cierto que no se rompió por completo, sino que estuvo de pie durante más de dos años, de vez en cuando en contacto. Se alega que con la ayuda de Yut, se descubrió un nuevo tipo de suelo lunar.
En cuanto a los rovers planetarios rusos, Lunokhod-2 (1973) fue nuestro último proyecto completado. También hoy hay planes para crear vehículos de descenso Luna-25, Luna-27 y Luna-28. El primero está diseñado para romper la tecnología, el segundo analizará muestras de suelo en su lugar, y el tercero es traer hielo lunar a la Tierra.
Luna-25 (Luna-Glob):

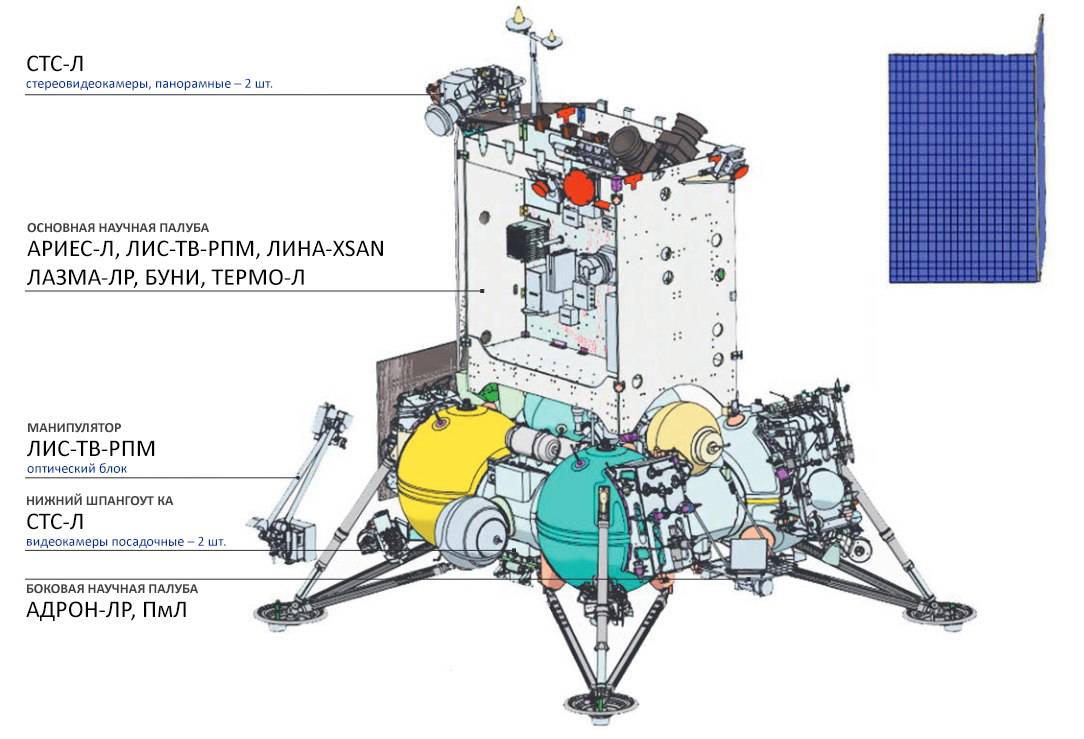
Luna-27 (Luna-Resource-PA):
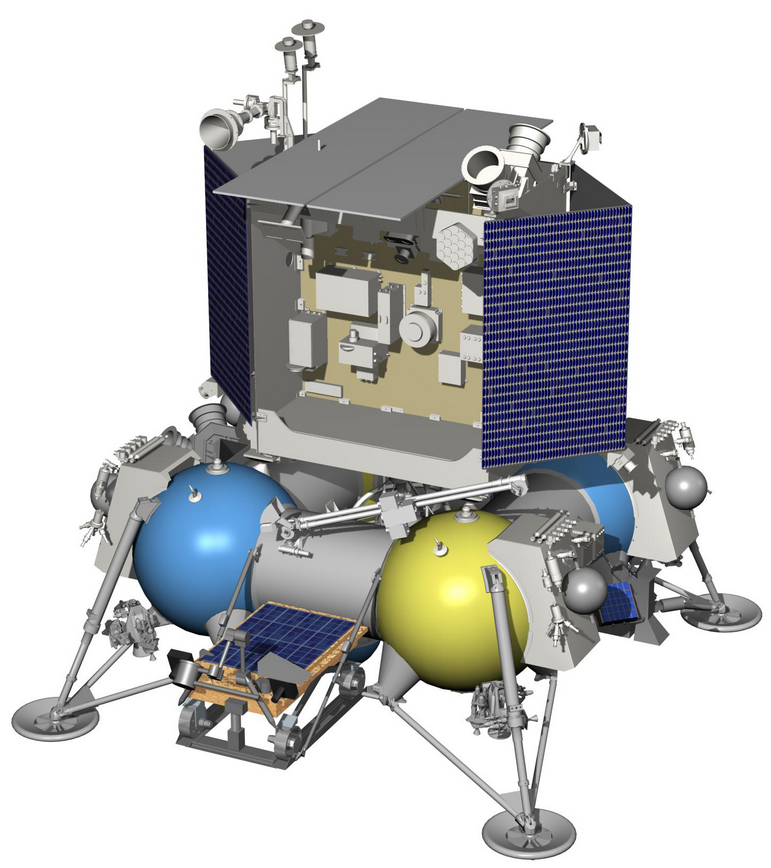
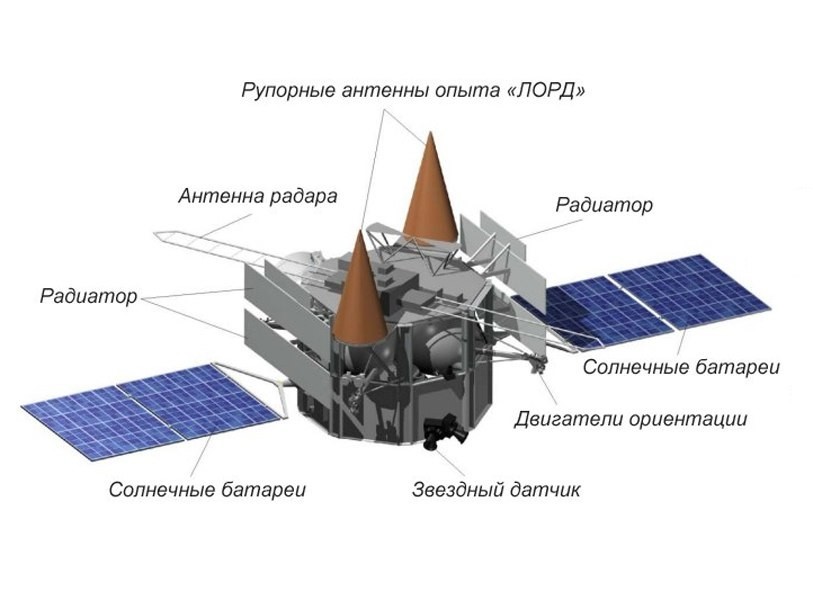
En el marco del mismo proyecto, la estación automática Luna-26 (Luna-Resource) también explorará la Luna:
Dados los constantes aplazamientos y los costos reducidos del programa espacial, no se sabe si estos vehículos volarán en absoluto. Los robots de investigación modernos (AMS, planetas móviles) son muy caros de desarrollar, crear y lanzar. Por lo tanto, tales proyectos son a menudo el resultado de la cooperación internacional. Por ejemplo, el programa ExoMars es implementado conjuntamente por la Agencia Espacial Europea y Roscosmos. La primera parte, ExoMars 2016, solo tuvo un éxito parcial: el satélite de retransmisión del Orbitador de gas de rastreo entró con éxito en órbita alrededor de Marte y el módulo de aterrizaje Schiaparelli se estrelló. En 2020, se planea lanzar la segunda fase del programa: enviar a Marte la plataforma de superficie desarrollada por Roscosmos con el rover ExoMars. Esperemos que todo salga con éxito, y el planeta rover diseñado por Rusia finalmente comenzará a estudiar el desierto marciano.

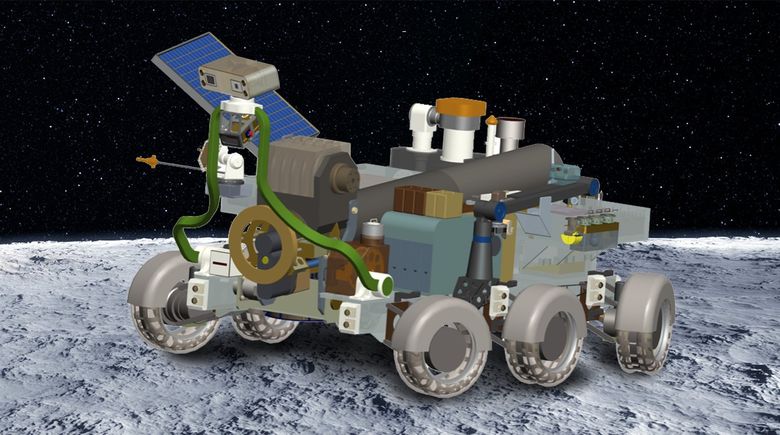
Sin embargo, existe la esperanza de que Roscosmos esté implementando otro proyecto interesante de un planeta explorador de investigación, que hasta ahora tiene el nombre de "Robot Geólogo". Hace dos años se informó que, en términos de funcionalidad, sería comparable a Curiosity, que voló a Marte en 2012, solo el "Robot Geológico" será enviado a la Luna. Un rover lunar de seis ruedas tendrá unos 4 m de largo y pesará unos 1400 kg. Hasta ahora esto es solo un proyecto, pero quién sabe ...
¡Y aquí están las plumas!
Durante muchos años, dos manipuladores robóticos han estado trabajando en la EEI en el espacio exterior: el manipulador canadiense Canadarm2 con el "expansión" SPDM ("Dextre"), que se puede controlar tanto desde la estación como desde la Tierra:

... y JEMRMS japonés de 10 m de largo:

Avatares de robot
Una de las áreas más interesantes en el desarrollo de la robótica espacial son los robots avatar. Estos son dispositivos que los astronautas pueden controlar de forma remota, realizando trabajos en el espacio exterior, pero al mismo tiempo en la calidez y comodidad de una estación espacial. El hecho es que liberar a una persona en el espacio exterior es muy costoso: cada astronauta está cosido con trajes espaciales individuales, que en sí mismos son como varios autos de lujo, pero aún necesitan ser entregados a la estación. Si calcula todos los costos, cada hora de trabajo de los astronautas en el espacio exterior cuesta, según diversas fuentes, $ 2-4 millones. Además, no siempre es necesario tener un ingenio especial; las operaciones de rutina son suficientes en la reparación / instalación / descarga / carga del espacio. Sería ideal si los robots autónomos estuvieran haciendo esto, y los astronautas pasaran su tiempo en tareas más importantes o simplemente se relajaran más. Pero, por desgracia, las tecnologías de inteligencia artificial todavía están en su infancia, por lo que puede ahorrar dinero y tiempo en los paseos espaciales solo con la ayuda de avatares robóticos.
Su desarrollo se lleva a cabo tanto en la NASA como en Roscosmos, y posiblemente en otros países. Por ejemplo, en el marco del programa estadounidense Robonaut, se crearon varios modelos de robots avatar antropomórficos. Robonaut 2 en 2011 enviado a la ISS.

Este año, finalizó la competencia iniciada por la NASA para desarrollar los mejores algoritmos de control para el futuro robot Robonaut 5 ("Valkyre"), que se planea utilizar en varias misiones de agencias, incluida una expedición a Marte.

El robot de 185 cm de altura pesa 135 kg, consume 1,8 kWh y está controlado por dos computadoras basadas en Intel Core i7. El robot recibe información básica sobre el entorno circundante utilizando un sistema de sensores, que incluye visión estéreo pasiva, escaneo láser y la generación de una nube de puntos de luz estructurada por infrarrojos (generación de nubes de puntos de luz estructurados por IR). La potencia del robot puede ser autónoma o por cable.
El robot avatar antropomórfico ruso SAR-400, nuestro primer robot espacial después de un descanso de 20 años, fue notado en las noticias hace un par de años al viajar frente al presidente en un ATV. Después de las pruebas en tierra en un prototipo de tamaño completo del módulo ISS, se planeó enviar los robots a la estación real, pero estos planes fueron abandonados. Más tarde, se introdujo un modelo SAR-401 mejorado, que también participa en la EEI, pero no antes de 2021.
Además, nuestra corporación espacial planea establecerse en la ISS Andronavta, un robot acompañante para la asistencia psicológica e informativa a los astronautas. Este no es el primer experimento de este tipo: en 2013, el robot japonés Kirobo fue llevado a la estación, que se convirtió, ghm, en un compañero del astronauta japonés. Pero mientras Kirobo tenía solo 34 cm de alto y pesaba 980 gramos, el Andronaut era del tamaño de un tipo fuerte. El prototipo actual es incluso demasiado grande para la ISS, y si enviamos un robot de este propósito a la estación, sin duda será un modelo más compacto.

Además, Andronaut es un robot de doble propósito: también puede funcionar en modo avatar, siendo controlado por una persona tanto desde la estación como desde la Tierra. Se supone que debe usarse para trabajar dentro del módulo de la estación en caso de despresurización, así como para la inspección programada en un modo semiautónomo.
Él mismo un maestro
Se está desarrollando un proyecto interesante bajo los auspicios de la NASA: un robot espacial ("Libélula") para el montaje y reparación de satélites. De hecho, este es un brazo manipulador de 3.5 m de largo con el cual los satélites pueden montar antenas y otros equipos frágiles independientemente en el espacio. Dragonfly también se utilizará para ensamblar grandes satélites en el espacio que son demasiado caros o imposibles de poner en órbita por completo.
La misma oficina SSL que Dragonfly crea también trabaja en proyectos para robots de reparación de satélites: RSGS y Restore-L. Este es un problema muy urgente, ya que la vida útil de los satélites no es demasiado larga, generalmente es cuestión de años. Luego se quedan sin combustible para desviar motores o mueren, a menudo reponiendo la legión de escombros espaciales que ya ha envuelto el planeta. Y con la ayuda de robots de reparación, puede ahorrar dinero en el lanzamiento de nuevos satélites en lugar de los quebrados y ralentizar la basura del espacio cercano a la Tierra.
El año pasado, el jefe del laboratorio de robótica espacial TsNIImash dijo que los robots de reparación de satélites también se están desarrollando en nuestro país. Pero no pudimos encontrar ninguna información sobre estos desarrollos.
Abeja estrella
La NASA planea enviar pronto un robot auxiliar específico Astrobee a la ISS. Este es un cubo con un lado de 30 cm, que volará alrededor de la estación y ayudará a los astronautas a realizar experimentos en microgravedad, además de servir como ojos y oídos adicionales para Houston. Una especie de snitch revoloteando.
El "Star Bee" incluso tiene un pequeño manipulador con el que puede amarrar en algún lugar o sostener algo durante los experimentos. El robot eliminará las tareas de inventario de rutina de los astronautas; con la ayuda de un escáner RFID, podrá catalogar y actualizar datos sobre la ubicación de cualquier unidad y objeto en la estación. Además, este alter ego de alta tecnología, Lizuna, podrá monitorear la calidad del aire y el nivel de ruido en la ISS.
Ladrón de asteroides
La NASA, como la agencia aeroespacial más rica del mundo, puede permitirse proyectos muy complejos e inusuales. A mediados de la década de 2020, iban a implementar la Misión de redireccionamiento de asteroides original para el estudio de los asteroides. Un robot especial tuvo que volar hasta el asteroide, encontrar una roca adecuada en su superficie, agarrarla con manipuladores y ponerla en órbita alrededor de la Luna, donde los astronautas tomarían la piedra en sus brazos amigos, tomarían muestras y la enviarían a la Tierra para analizar la composición química para descubrir toda la verdad. sobre ese asteroide del que robó la roca. El prototipo del robot ya pasó las pruebas, su lanzamiento fue planeado para el 2021. Pero los programas espaciales no solo nos cortan, y el proyecto se ha convertido en una víctima de los recortes presupuestarios. Quizás el prototipo del robot portador de piedra se usará en otras misiones de la NASA.
Aunque en realidad, como ya se mencionó, los robots en el espacio son una moneda de diez centavos por docena, casi no hay dispositivos que, en la mente del lector masivo, correspondan al título de "robot", un aparato antropomórfico que funciona de manera autónoma. Otra cosa es que los robots antropomórficos en el espacio son los últimos que se necesitan: la racionalidad, la funcionalidad y la especialización gobiernan allí. El antropomorfismo en su mayor parte es apropiado solo para aquellos dispositivos que a menudo o constantemente entran en contacto con humanos. Mientras tanto, la gran mayoría de los robots espaciales se verán como cualquier cosa, pero no como "robots". Pero cuando creamos tecnología de inteligencia artificial, lo suficientemente compacta y eficiente energéticamente, para que pueda integrarse en dispositivos espaciales con sus limitaciones de dimensión masiva más severas, entonces llegará la segunda era de los robots.
Mientras tanto, le deseamos éxito, buena suerte y generosos fondos para los desarrolladores de Andronaut.