 Fig. 1. Un vehículo no tripulado en el centro no puede hacer nada para garantizar la seguridad garantizada. En el caso de acciones inapropiadas por parte de un conductor humano desde un automóvil vecino, un accidente es inevitable, y luego una investigación de un accidente de un mes de duración con atención de la prensa al accidente, donde "el piloto automático mató al hombre". Ningún entrenamiento preliminar de la red neuronal ayudará a asegurar la máquina en tal situación. La única solución al problema es pre-proporcionar reglas de tráfico para robocars con el fin de excluir la ocurrencia de tal situación en principio
Fig. 1. Un vehículo no tripulado en el centro no puede hacer nada para garantizar la seguridad garantizada. En el caso de acciones inapropiadas por parte de un conductor humano desde un automóvil vecino, un accidente es inevitable, y luego una investigación de un accidente de un mes de duración con atención de la prensa al accidente, donde "el piloto automático mató al hombre". Ningún entrenamiento preliminar de la red neuronal ayudará a asegurar la máquina en tal situación. La única solución al problema es pre-proporcionar reglas de tráfico para robocars con el fin de excluir la ocurrencia de tal situación en principioEn los últimos años, los fabricantes de automóviles y las empresas de TI han estado compitiendo por primera vez para desarrollar un vehículo totalmente no tripulado que pueda operar sin intervención humana en cualquier situación (SAE Nivel 5). La distribución masiva de estos automóviles promete enormes beneficios económicos y sociales para la sociedad humana, entre ellos una reducción dramática de muertes en las carreteras, una disminución en el número de personas con discapacidad, un sistema de transporte más flexible y eficiente accesible para todos.
Parece que los fabricantes de automóviles actuales y las empresas de TI involucradas en la carrera tecnológica perciben el vehículo no tripulado como un producto, y piensan principalmente en el desarrollo del mercado y no en la cooperación con otros fabricantes de automóviles. Mobileye, recientemente adquirida por Intel, tiene una perspectiva diferente. Ella les recuerda a todos los participantes en la “competencia capitalista” que un robocar no es solo un producto, sino una industria donde se deben desarrollar reglas conjuntas. Con este fin, la compañía ha desarrollado el primer
marco matemático del mundo
para la seguridad garantizada de vehículos no tripulados (pdf) . El marco fue
presentado en el Foro Mundial del Conocimiento en Seúl, Corea del Sur, por el profesor Amnon Shashua, quien es el CEO de Mobileye y Vicepresidente Senior de Intel.
Naturalmente, Mobileye / Intel tiene su propio interés. El desarrollo de estándares mundiales para automóviles puede generar más ganancias que la producción de estos automóviles.
Para que la industria del transporte no tripulado se desarrolle con éxito, se requieren los esfuerzos conjuntos de los fabricantes de automóviles, las empresas de tecnología y los reguladores gubernamentales. Juntos, deben elaborar un modelo común de interacción que sea común para todos. Mobileye ha creado un marco matemático para un modelo tan genérico. Se describe en detalle en un
artículo científico . El marco se basa en dos principios fundamentales:
- Garantías de seguridad comprobadas.
- Escalabilidad económica.
Mobileye cree que sin un modelo claro que describa estos dos parámetros críticos, todos los esfuerzos para crear autos autónomos dejarán de tener sentido, es decir, los robocars simplemente se convertirán en un costoso experimento científico.
Las garantías de seguridad comprobables estándar son el conjunto mínimo de requisitos que debe cumplir cada vehículo no tripulado y una descripción de cómo cumplirlos.
Escalabilidad económica: un requisito diseñado para garantizar que las soluciones de ingeniería desarrolladas sean realmente capaces de escalar a millones de automóviles, y no volver al nicho académico, siendo de interés solo para la investigación científica. Esto ya ha sucedido en la historia del desarrollo de la Inteligencia Artificial y la visión artificial. Entre los investigadores occidentales, existe el término "invierno de IA" (invierno de IA). Con esto, generalmente se refieren a las décadas de inacción casi completa que se produjeron después del fracaso de la investigación sobre Inteligencia Artificial a principios de los años 80. El fracaso era inevitable porque los investigadores inicialmente establecieron objetivos inalcanzables y exageraron.
Existe la opinión de que el desarrollo de vehículos no tripulados puede seguir el mismo escenario: los desarrolladores de esta tecnología prometen perspectivas demasiado brillantes, lo que podría convertirse en una decepción para la sociedad y la finalización de la financiación de la industria si los desarrolladores no pueden producir un resultado que cumpla con estas expectativas.
Para evitar que esto suceda, debe pensar detenidamente en todos los problemas al desarrollar el marco, incluida la escalabilidad económica.
Los desarrollos existentes no cumplen con precisión estos dos criterios importantes: garantías de seguridad comprobables estándar y requisitos de escalabilidad económica. Afortunadamente, la industria ahora comprende posibles problemas, y tenemos la oportunidad de prever opciones para resolver posibles problemas de antemano.
Los expertos de Mobileye son críticos de cómo los ingenieros de desarrollo de vehículos no tripulados ahora intentan resolver problemas de seguridad utilizando métodos estadísticos. Supuestamente suficiente para rodar un cierto kilometraje (grande) para entrenar la red neuronal, y esto garantiza la seguridad del automóvil en casi cualquier situación. Pero debe tenerse en cuenta de inmediato que, en teoría, es imposible lograr una seguridad absoluta, ya que muchos accidentes ocurren debido a fallas de otros usuarios de la carretera, y el sujeto mismo no tiene forma de influir en la situación (para una ilustración, vea la Fig.1 arriba). Es decir, de esta manera es imposible lograr un nivel cero de incidentes, pero solo reducirlo a un nivel socialmente aceptable.
Mobileye da un ejemplo. Es razonable suponer que para alcanzar un consenso público sobre el reemplazo de vehículos guiados con drones, la tasa de mortalidad en las carreteras debería disminuir en tres órdenes de magnitud. Suponga que la probabilidad de morir en un accidente mientras conduce una persona es 10
−6 por hora (esta es una cifra cercana a la real). Luego, para "seguridad garantizada", necesitamos reducir esta probabilidad en vehículos no tripulados a 10
−9 por hora (esta también es una cifra real tomada de la industria de la aviación: corresponde a la probabilidad de separación involuntaria del ala del avión del fuselaje durante el vuelo).
Entonces, para garantizar la probabilidad estadística de una tasa de mortalidad tan baja de 10
−9 por hora, obviamente, debe recopilar 10
9 horas de datos experimentales, lo que corresponde a una colisión de aproximadamente 45 mil millones de kilómetros.
Además, en el caso de un sistema de muchos agentes que reacciona con el mundo exterior y las personas vivas (conductores y peatones), no podemos usar simuladores virtuales, porque todavía no se ha creado un algoritmo de acción (y es poco probable que se cree en el futuro) y, en consecuencia, , un simulador del comportamiento de un conductor o peatón impredecible. Es decir, cualquier cambio en el software de gestión requerirá una recopilación adicional de datos experimentales, otros 45 mil millones de horas para ajustarse al modelo estadístico.
Al final, entrenar un sistema de seguridad en una red neuronal usando los datos recopilados inevitablemente sufrirá una falta de interpretabilidad y explicabilidad. Si el piloto automático derriba a un peatón con un desenlace fatal, debe encontrar la razón y explicar qué causó exactamente el accidente, qué debe arreglarse en el sistema para que esto no vuelva a suceder. Lamentablemente, el "recuadro negro" de la red neuronal no proporciona una explicación clara y comprensible en tales situaciones.
Los vehículos no tripulados tendrán que compartir el camino con las personas en las próximas décadas, por lo que cada modelo debe tener en cuenta la naturaleza impredecible de las personas. Además, los pilotos automáticos tendrán que adaptarse en las primeras décadas a un estilo de conducción que las personas consideran "normal".
Al desarrollar un modelo de seguridad garantizada, debe tenerse en cuenta que cualquier vehículo puede experimentar daños mecánicos en cualquier momento o estar expuesto a fuerzas externas. Aunque es imposible prever completamente todos los escenarios de un posible accidente, es posible minimizar la probabilidad de tales escenarios y la mortalidad prevista por hora de conducción.
Mobileye propone implementar un marco con un conjunto de reglas basadas en modelos matemáticos. Protegerán a los fabricantes de automóviles de la censura pública en caso de un accidente fatal que involucre vehículos no tripulados, y tales incidentes son inevitables.
Mobileye ha desarrollado un sistema llamado
Seguridad sensible a la responsabilidad (RSS) . Asegura que, en términos de toma de decisiones, el sistema de piloto automático nunca emitirá un comando que pueda conducir al hecho de que el robocar causará un accidente. Con este fin, los conceptos de "estado seguro" y "comandos cautelosos" se introdujeron en el modelo, lo que garantiza que el automóvil no vaya más allá de los límites de un estado seguro.
El sistema RSS se distingue por el hecho de que durante su desarrollo abandonaron el enfoque tradicional con el análisis de numerosas condiciones y el análisis intensivo de una gran cantidad de datos sobre la situación actual; esto simplemente no es factible tanto en condiciones reales de la carretera como en la simulación. En cambio, cada acción de piloto automático se verifica en tiempo real para el cumplimiento de fórmulas matemáticas simples. La potencia informática de las computadoras modernas es suficiente para realizar tales cálculos en tiempo real. Por ejemplo, en la fig. La Figura 2 muestra la fórmula para calcular la distancia segura al vehículo que está delante con un conductor en vivo si no hay conexión inalámbrica y coordinación de acciones de acuerdo con el protocolo de transporte interno V2V con este automóvil.
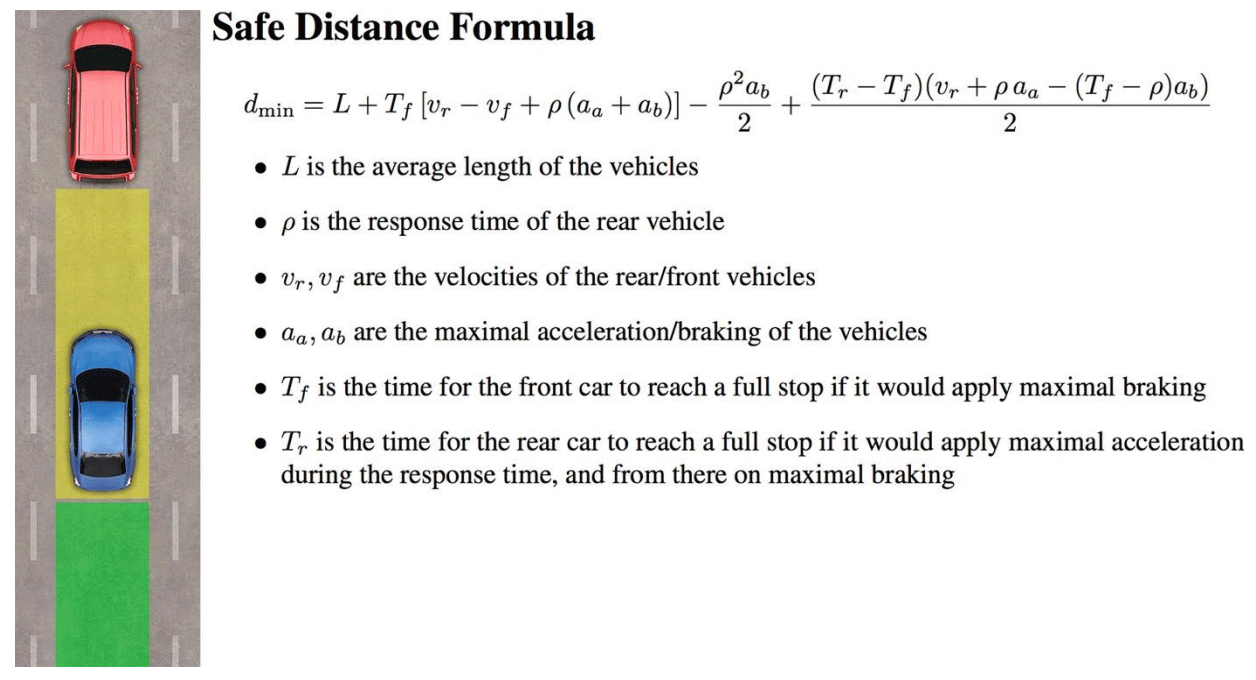 Fig. 2. La fórmula para calcular la distancia segura entre automóviles
Fig. 2. La fórmula para calcular la distancia segura entre automóvilesSegún Mobileye, las reglas matemáticas desarrolladas reducirán las muertes en la carretera en tres órdenes de magnitud al cambiar a vehículos no tripulados. Si ahora la mortalidad es de 1 persona por millón de kilómetros de viaje, en el transporte no tripulado será de 1 persona por mil millones de kilómetros. Para el sistema de transporte de EE. UU., Esto significa una disminución de la mortalidad de aproximadamente 40,000 personas al año (estadísticas para 2016) a aproximadamente 40 personas al año.
Debe tenerse en cuenta que los accidentes y las muertes causadas por drones siguen siendo posibles en caso de daños mecánicos, fallas de los sensores en un vehículo no tripulado y otros fallos de funcionamiento. Sin embargo, una reducción de tres órdenes en la mortalidad debería mostrar convincentemente a la sociedad los beneficios del transporte no tripulado.
 Fig. 3. Los corredores de seguridad calculados alrededor del automóvil determinarán al culpable al maniobrar y cortar
Fig. 3. Los corredores de seguridad calculados alrededor del automóvil determinarán al culpable al maniobrar y cortarUn vehículo no tripulado (automóvil azul en la Fig. 3) sabe claramente qué pasillos deben observarse antes del vehículo que se encuentra delante y delante del vehículo. Si un conductor humano se entromete en este corredor, por ejemplo, desde el frente (es decir, el UAV se interrumpe), y debido a un frenado repentino, el UAV choca con el automóvil desde atrás, entonces, en caso de una prueba, se encontrará que un automóvil rojo con un conductor humano detrás del volante es el culpable.
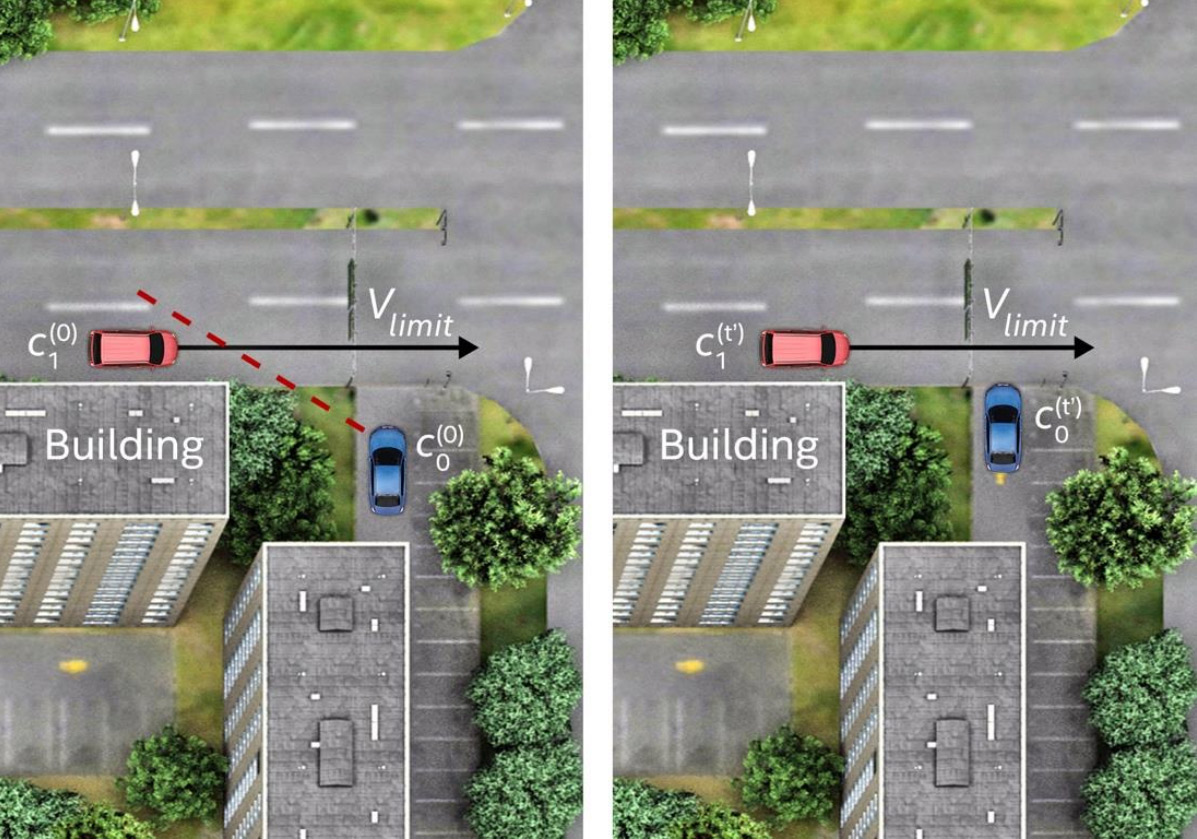 Fig. 4. El sistema RSS incluso tiene en cuenta situaciones en las que otros objetos cierran objetos (automóviles, peatones, etc.)
Fig. 4. El sistema RSS incluso tiene en cuenta situaciones en las que otros objetos cierran objetos (automóviles, peatones, etc.)Mobileye sugiere usar el sistema Sensor Fusion, basado en tres sistemas desarrollados independientemente, donde cada uno se basa en tres tecnologías diferentes: una cámara, un mapa de alta resolución y un radar lidar.
Al calcular el estado seguro y las acciones cautelosas correspondientes, el modelo matemático RSS tiene en cuenta, entre otras cosas, situaciones en las que otros objetos cierran objetos (automóviles, peatones, etc.). Por ejemplo, en la fig. 4 el automóvil sale cuidadosamente del estacionamiento, teniendo en cuenta la velocidad máxima posible (
) coche en la carretera.
Si tales reglas están codificadas en el programa de piloto automático, la investigación de incidentes de vehículos no tripulados será simple, breve y objetiva, y la responsabilidad por accidentes puede establecerse de manera precisa y definitiva. Dichas reglas, según la compañía, aumentarán la confianza del público en los vehículos no tripulados. Todos sabrán que hay reglas inmutables a las que obedece
cualquier automóvil con piloto automático. Al igual que las tres leyes de la robótica Isaac Asimov, solo para las normas de tráfico.