Hola geektimes! En este artículo quiero hablar sobre los sistemas modernos de búsqueda personal de microondas, así como los resultados de nuestro proyecto, que está desarrollando un nuevo y prometedor sistema de búsqueda de microondas basado en el uso combinado de radar y visión artificial. Se espera que el sistema de inspección desarrollado se utilice en el transporte terrestre con gran tráfico de pasajeros. Esto se logrará debido a las características técnicas superiores: rendimiento extremadamente alto, la posibilidad de inspección en ropa exterior ajustada, características de peso y tamaño significativamente menores, costo y consumo de energía. El artículo describe la configuración y el procedimiento experimental creado en el proyecto para simular el sistema de inspección de microondas descrito, así como el resultado de un experimento con un maniquí con objetos ocultos debajo de la ropa.
Para comprender cómo el sistema de búsqueda personal de microondas desarrollado difiere de los sistemas existentes en el mercado y cómo es posible superar las limitaciones existentes de los sistemas de búsqueda de microondas que impiden su uso generalizado (como los detectores de metales), es necesario considerar el estado de las cosas.
Para obtener imágenes de radar de objetos ocultos debajo de la ropa en todos los sistemas de inspección por microondas, se utiliza la síntesis de apertura, en la que el movimiento mecánico de las antenas o su conmutación electrónica permite la formación de una antena con una apertura equivalente más grande. Al usar la apertura sintetizada, se obtiene una alta resolución espacial, que está determinada por la longitud de onda, la banda de la señal de la sonda y también el tamaño de la apertura misma. El parámetro fundamental que limita la resolución espacial de las imágenes de radar es la longitud de onda de la radiación, ya que es imposible lograr una resolución espacial menor que la longitud de onda en una geometría de sonda que sea prácticamente adecuada para la inspección humana.
En los sistemas de inspección modernos, la apertura sintetizada se forma de dos maneras: debido al movimiento mecánico de las antenas y la conmutación electrónica, o solo debido a la conmutación electrónica. El
sistema ProVision L-3 más famoso y extendido, a través del cual pasaron muchos lectores, utiliza escaneo mecánico con dos conjuntos de antenas verticales lineales. En la dirección vertical, la apertura sintetizada se obtiene por conmutación electrónica de las antenas, y en la dirección horizontal debido al desplazamiento mecánico [1].
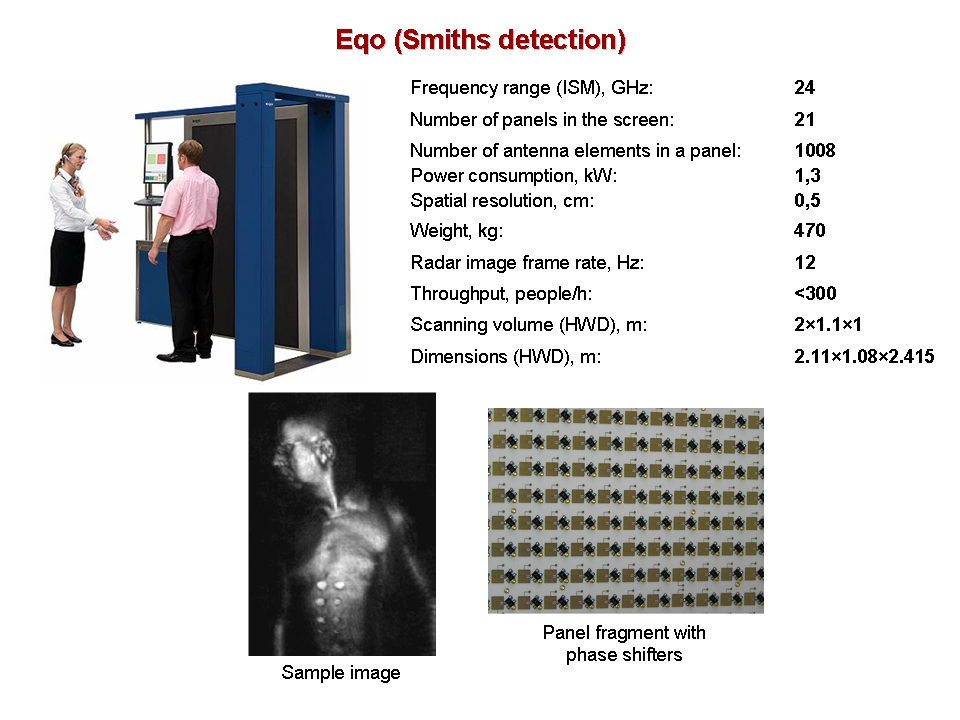
En sistemas posteriores, como
Eqo by Smiths Detection [2] y
QPS by Rohde & Schwarz [3], el desplazamiento mecánico no se utiliza para formar la abertura. En cambio, hay un cambio rápido de antenas o elementos de antena ubicados en un panel plano, lo que le permite recibir en tiempo real una imagen de radar buscada desde la ubicación del panel. A pesar de la rápida conmutación electrónica de las antenas en los últimos dos sistemas, su rendimiento se mantiene al nivel del sistema con escaneo mecánico L-3 ProVision, ya que la persona inspeccionada necesariamente debe quitarse la ropa exterior, ir al área de inspección, tomar una postura estacionaria durante la duración del escaneo (QPS) o girar, parado, para recibir imágenes de radar desde todas las direcciones (Eqo).
En los sistemas de inspección de conmutación electrónica, la parte de microondas es mucho más complicada que en los sistemas que utilizan exploración mecánica, ya que se requiere cambiar la mayor cantidad de antenas. Debido a la mayor cantidad de canales, se genera una gran corriente de datos en el sistema (preste atención a este parámetro en el sistema QPS), que requiere el procesamiento en tiempo real de una computadora de alto rendimiento que consume la mayor parte de la energía consumida. La única ventaja de los sistemas de detección en el factor de forma de la pantalla son sus dimensiones más pequeñas en comparación con la versión del portal de L-3 ProVision.
Basado en el enfoque tradicional para sintetizar la apertura, el rendimiento de los sistemas de inspección por microondas se puede aumentar rodeando a una persona bajo examen con muchos paneles con antenas para obtener una visión simultánea desde diferentes ángulos. Este enfoque se implementó en el sistema de inspección
easyCheck desarrollado por Camero [4]. Este sistema tiene un diseño de portal en forma de paneles con antenas ubicadas alrededor de la persona que se busca. Las imágenes de radar de ángulos múltiples de una persona que pasa por el portal se obtienen con una frecuencia de 8 Hz, lo que permite detectar objetos peligrosos ocultos debajo de la ropa en movimiento.
Actualmente, todos los sistemas de inspección disponibles en el mercado reconocen automáticamente los objetos peligrosos e informan el resultado del reconocimiento en forma de pictogramas sin mostrar imágenes de radar al operador, preservando así la privacidad de los inspeccionados.
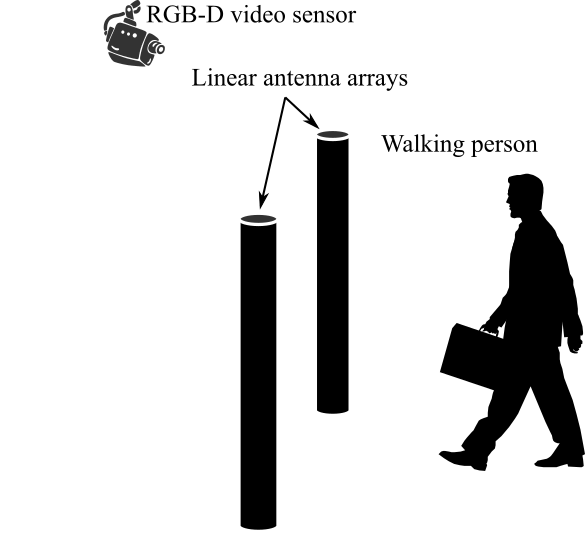
En el sistema de búsqueda que estamos desarrollando, para la formación de una abertura sintetizada, se utilizará el movimiento natural de una persona entre conjuntos de antenas lineales verticales estacionarias, lo que nos permite superar análogos en las siguientes características: rendimiento, masa, dimensiones, costo y consumo de energía. El procesamiento coherente de la señal de radar en dicho sistema se lleva a cabo utilizando un sensor de video RGB-D o lidar, que sincrónicamente con el sistema de radar detecta el movimiento de la persona que se busca en el espacio. El mapa de profundidad registrado por el sensor de video sirve para extraer la trayectoria de partes del cuerpo humano para la compensación posterior de las incursiones de fase asociadas con el movimiento en la señal del radar. Una apertura sintetizada, formada al mover el objetivo más allá de una antena estacionaria o sistema de antena, se denomina apertura sintetizada inversa.
Un sistema de inspección por microondas que utiliza el principio de síntesis de apertura inversa debe tener las características superiores enumeradas anteriormente por las siguientes razones:
- El rendimiento máximo se logrará debido al hecho de que la persona inspeccionada no necesita detenerse, ya que para obtener una imagen de radar es necesario ir entre las líneas de antena.
- El peso y las dimensiones se vuelven mínimos, ya que no se necesita un portal para aislar el área de movimiento de la antena, ni paneles masivos con antenas.
- El número de antenas se vuelve significativamente menor que el de los sistemas de microondas con conmutación exclusivamente electrónica, lo que reduce la complejidad y el costo de la parte de microondas del sistema de inspección.
- Las muestras de la señal de radar provienen de un número menor de canales y se procesan a medida que llegan de tal manera que después de que una persona pasa la zona de inspección, cuya longitud debe ser igual al tamaño horizontal de los paneles o portal de los sistemas tradicionales, la imagen del radar se calcula simultáneamente para toda la superficie del cuerpo humano. Debido al bajo flujo de datos de radar y su procesamiento al recibo, no se requiere un potente procesador de datos, y el sistema de microondas se puede construir en una versión móvil en el factor de forma de un detector de metales de marco o dos bastidores con antenas ubicadas a ambos lados de una persona que camina.
La operatividad del sistema de inspección por microondas descrito se investigó utilizando la configuración experimental creada para estos fines [5,6], cuya fotografía se muestra en la siguiente figura.
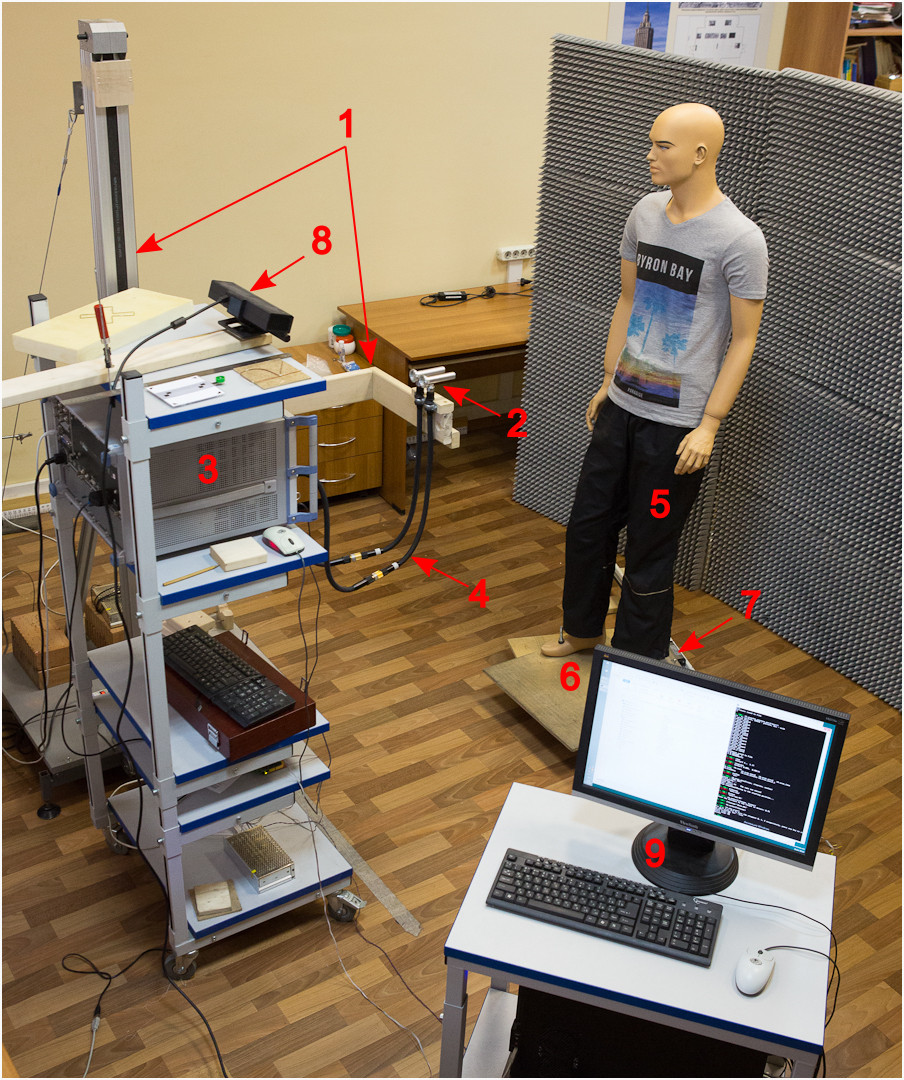
La instalación consta de un módulo de desplazamiento lineal (1) de las antenas de recepción y transmisión (2), un analizador de red vectorial (3), alimentadores de antena flexibles (4), un maniquí (5), un carro para mover el maniquí (6), un módulo de maniquí lineal ( 7), sensor de video RGB-D (8) y computadora personal (9). Las antenas de recepción y transmisión (2) están conectadas al analizador de red vectorial por medio de alimentadores flexibles (4). Los datos se obtienen por el método de animación de marionetas. El movimiento independiente de las antenas de recepción y transmisión (si se usan dos módulos) a lo largo de líneas paralelas le permite simular el comportamiento de los conjuntos de antenas lineales monostáticas y multiestáticas (MIMO). Al mismo tiempo, las posiciones de las antenas en las que tienen lugar las muestras de la señal de radar se establecen mediante programación, de modo que con la ayuda de la instalación es posible estudiar las características de cualquier conjunto de antenas lineales. Un maniquí humano (5), cuya dirección de movimiento se puede establecer orientando el módulo de desplazamiento lineal (7) ubicado en el piso, se mueve incrementalmente a intervalos programables. Después de establecer los parámetros del experimento: los intervalos de las muestras de la señal del radar, el intervalo de movimiento del maniquí, el rango de la frecuencia de la señal de la sonda, el número de frecuencias discretas, el experimento pasa automáticamente. Durante el experimento, para cada posición del maniquí, se registra un mapa de profundidad de la escena de sondeo y una muestra de la señal de radar en las posiciones de antena dadas. Los datos obtenidos se procesan juntos para obtener imágenes de radar. Para obtener datos similares en tiempo real de una persona que camina con un paso, se requerirá un conjunto de antenas lineales conmutadas electrónicamente. Una característica clave del sistema de búsqueda desarrollado es el uso de un sensor de video RGB-D (en la configuración experimental utilizamos Microsoft Kinect v2) o un dispositivo similar que le permite obtener una imagen de radar detallada utilizando una cantidad significativamente menor de datos de radar.
En las siguientes figuras se muestran ejemplos de datos iniciales registrados durante los experimentos.
 | 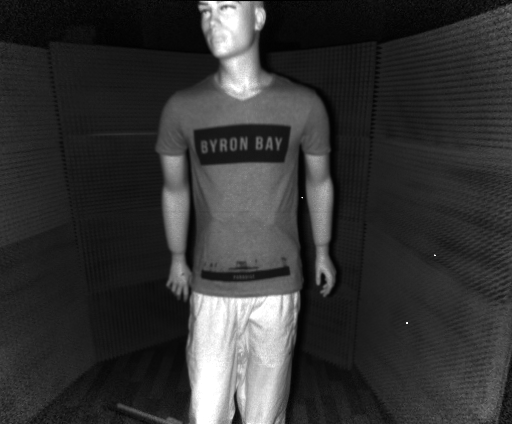 | 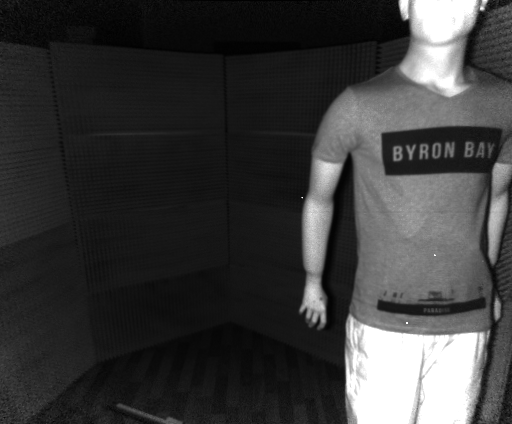 |
| 1er cuadro | Frame 101 | 201 marco |
|---|
| Imágenes IR obtenidas con Microsoft Kinect. |
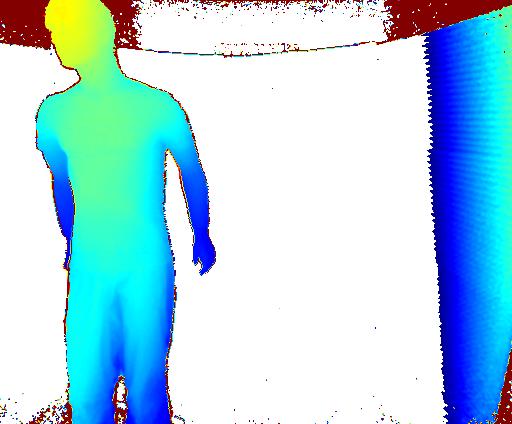 | 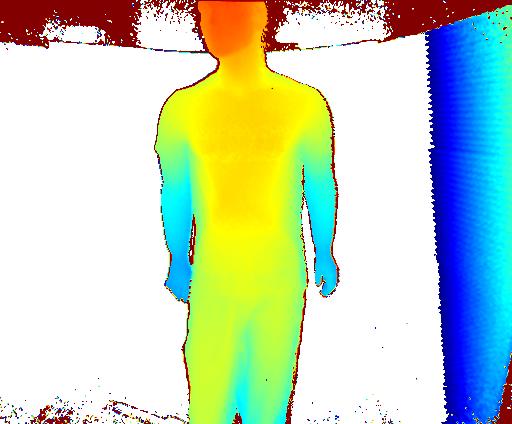 |  |
| 1er cuadro | Frame 101 | 201 marco |
|---|
| Mapas de profundidad obtenidos con Microsoft Kinect. |
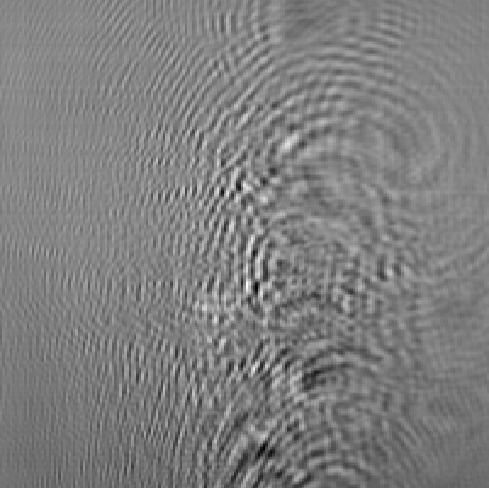 | 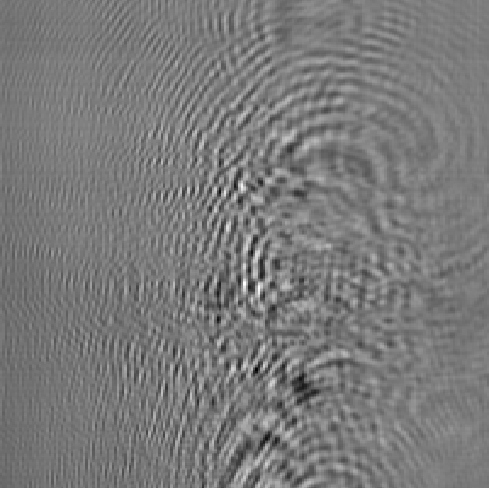 | 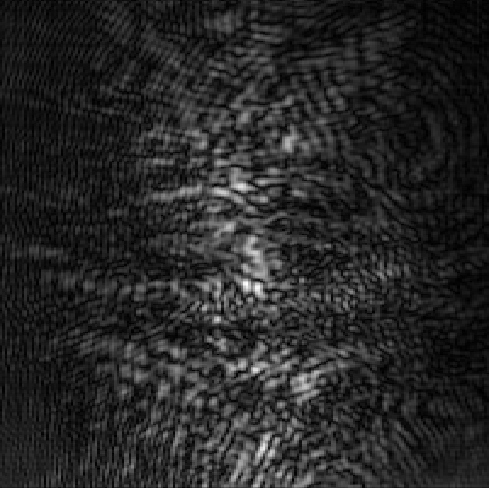 |
| Componente de señal de modo común | El componente en cuadratura de la señal. | Amplitud de señal |
|---|
| Una señal de radar (holograma de radio) grabada a una frecuencia de 15,55 GHz. |
Las imágenes infrarrojas y los mapas de profundidad de la escena sonora que se muestra arriba, con los números de serie 1, 101, 201, se obtuvieron durante el experimento en el que el maniquí se movió una distancia de 1 m con paradas cada 0,5 cm, lo que resultó en 201 cuadros. La señal de radar (holograma de radio) a una frecuencia de 15,55 GHz se presenta en forma de imágenes en escala de grises. La primera columna a la izquierda del holograma corresponde a las muestras de la señal de radar con un paso de 0,5 cm, obtenidas como resultado de la exploración mecánica de la escena de sondeo con número de serie 1. La última columna en el holograma corresponde a las muestras de la señal de radar para la escena de sondeo con el número de serie 201. Las columnas intermedias del holograma corresponden a escenas con intermedio Números de serie. En total, el holograma de radio tiene 201 columnas, de acuerdo con el número de escenas estáticas, y 201 filas, de acuerdo con el número de muestras de la señal de radar en un intervalo de 1 metro de longitud con un paso de muestreo de 0,5 cm. Para registrar un radio holograma similar en tiempo real, una matriz de antena lineal monostática de 1 metro que consiste en 201 antenas ubicadas a una distancia de 0,5 cm entre sí. Para una señal multifrecuencia que consiste en
N frecuencias, respectivamente, se obtienen
N radio hologramas.
Antes de procesar los datos obtenidos, es necesario calibrar el sistema óptico del sensor de video, así como una calibración conjunta del radar y los sistemas ópticos de la instalación.
Aquí se describe la calibración del sistema óptico Microsoft Kinect v2 y el canal de rango. El sistema de radar fue calibrado en dos etapas. En la primera etapa, se determinó la posición de la antena de desplazamiento lineal de la antena movida en el sistema de coordenadas asociado con el sensor de video. La segunda etapa consistía en medir la posición del centro de fase de la antena, que depende de la frecuencia de la señal de sondeo, que es necesaria para procesar una señal de banda ancha. La posición del centro del extremo abierto de la guía de ondas circular utilizada como antena se introdujo en el sistema de coordenadas del sensor de video utilizando un marcador gráfico montado en el extremo de la antena, como se muestra en la siguiente figura.

La posición del marcador se registró para las dos posiciones extremas en la línea de exploración. Las posiciones restantes de la antena se calcularon mediante interpolación. Los motores paso a paso y el sistema óptico del sensor de video proporcionaron un error en el posicionamiento de las muestras de señal, lo que afectó de manera insignificante la resolución de la imagen del radar.
Cuando se usa una banda ancha de la señal de sondeo, la posición del centro de fase de la antena a diferentes frecuencias puede ser diferente. Debajo del centro de fase de la antena, comprenda el centro imaginario, que puede tomarse como el centro de la antena radiada de una onda esférica. En una onda esférica, las superficies de igual fase son esferas. La antena se calibró en un pequeño difusor en comparación con la longitud de onda de la radiación y consistió en encontrar un factor de corrección para la señal registrada por la antena, lo que permite obtener la dependencia teóricamente esperada de la fase de la señal. La influencia de la calibración de la antena se ilustra en la siguiente figura, que muestra el resultado de la reconstrucción de una imagen de radar para un difusor de punto ubicado a una distancia de 20 cm de la línea de exploración, que coincide con el eje
Y en el gráfico. El sondeo y la restauración de la imagen del radar se llevaron a cabo en el rango de frecuencia de 6 a 12 GHz.
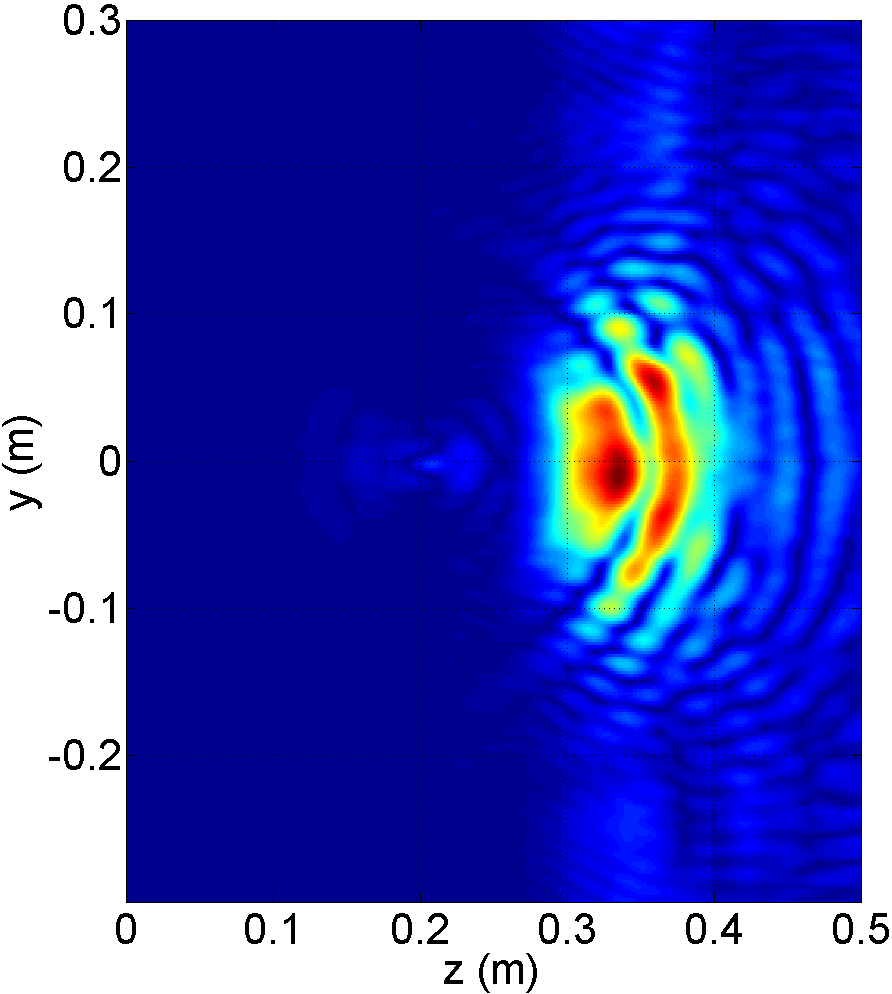 | 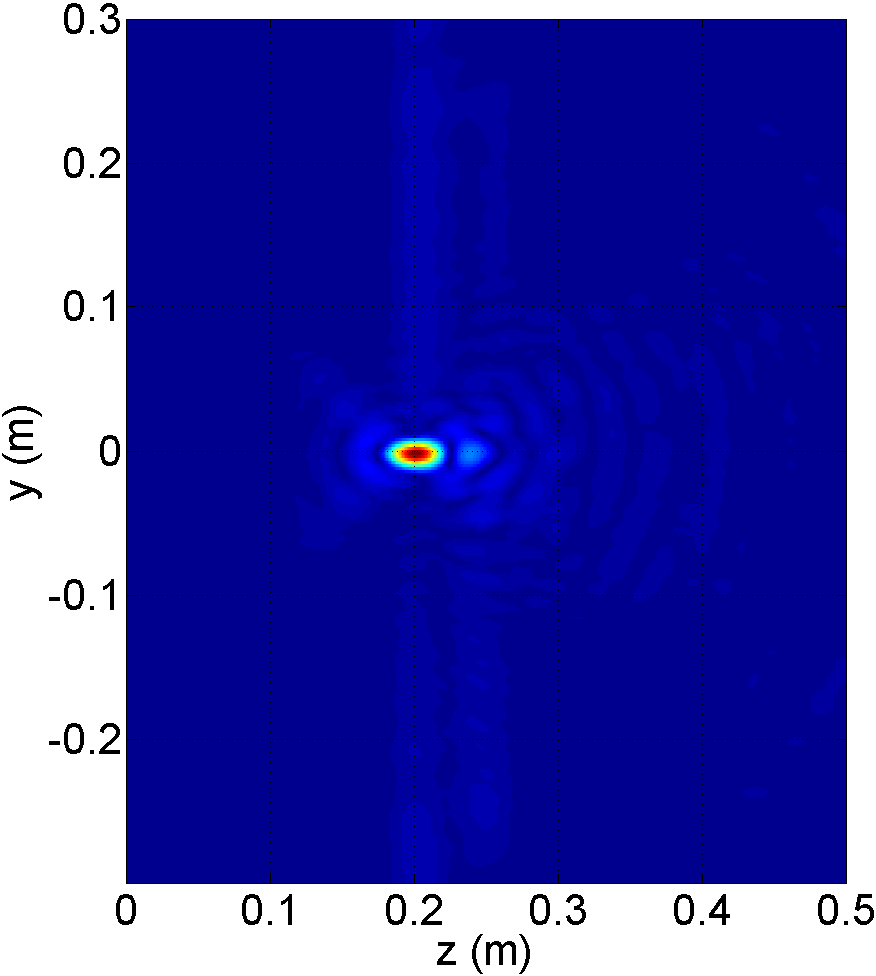 | 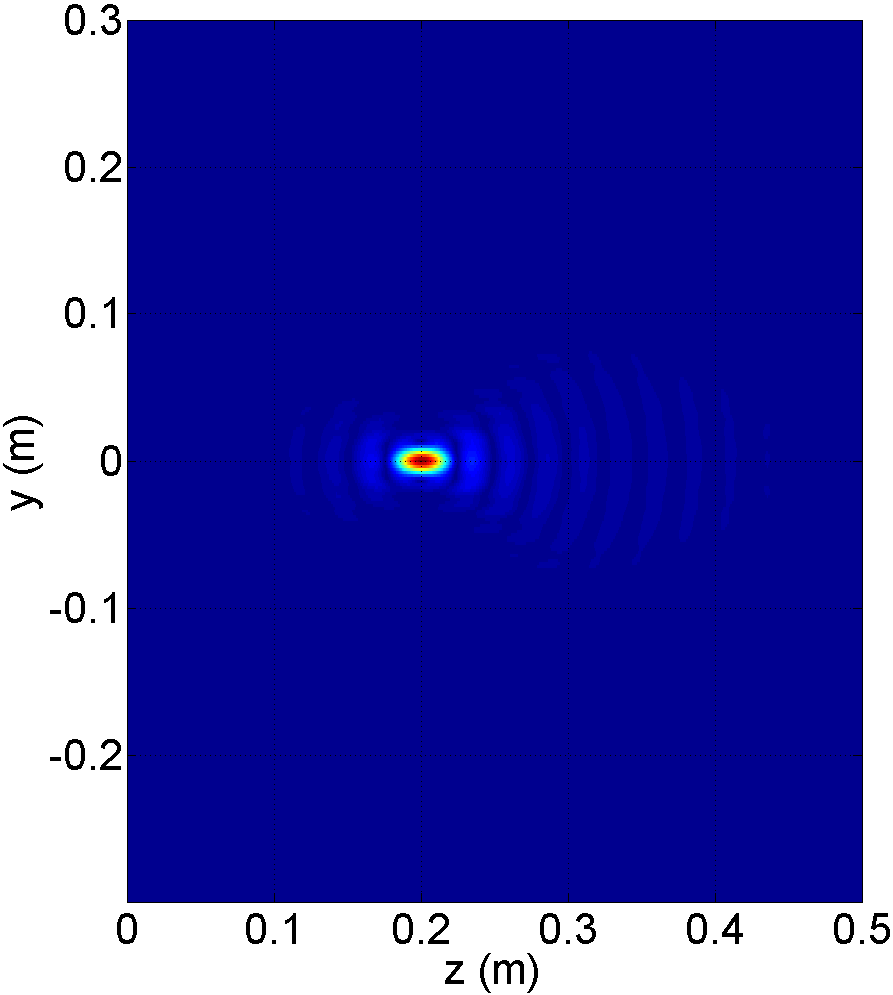 |
| Sin calibración de antena | Después de la calibración | Modelo |
|---|
| Imagen de radar reconstruida de un difusor de puntos |
La primera imagen a la izquierda en la figura anterior se obtuvo después de calibrar los alimentadores de antena para la posición media en la línea de exploración utilizando las cargas de referencia (conjunto de calibración) para el analizador de red vectorial. Se ve que el desplazamiento de los planos de medición hacia los extremos de los alimentadores no permite obtener una imagen de radar enfocada. La segunda imagen muestra la imagen de radar obtenida después de calibrar la antena y ajustar la fuente de datos. El tercero muestra una imagen de referencia obtenida como resultado de la simulación numérica.
Después de calibrar el sistema de antena, es posible procesar los datos obtenidos en experimentos con un maniquí con una señal de sonda de banda ancha. El procesamiento de la señal de radar consistió en los siguientes pasos: encontrar puntos específicos en la imagen en escala de grises del maniquí; generar una grilla densa asociada con puntos singulares, cada nodo del cual es un punto de enfoque móvil para la señal de radar; encontrar la trayectoria de puntos singulares de cuadro a cuadro; encontrar la trayectoria de los nodos de malla densos; integrando una señal de radar enfocada para cada nodo de malla densa de cuadro a cuadro; visualización de la matriz de datos resultante en forma de imagen de radar.
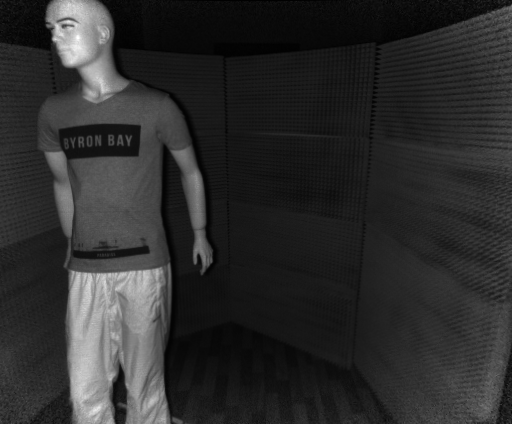
La siguiente figura ilustra la extracción de puntos específicos y su seguimiento en una secuencia de imágenes de medios tonos de un maniquí en movimiento. Cada imagen en escala de grises corresponde a un marco de profundidad que contiene el atributo de rango necesario para cada píxel en escala de grises.
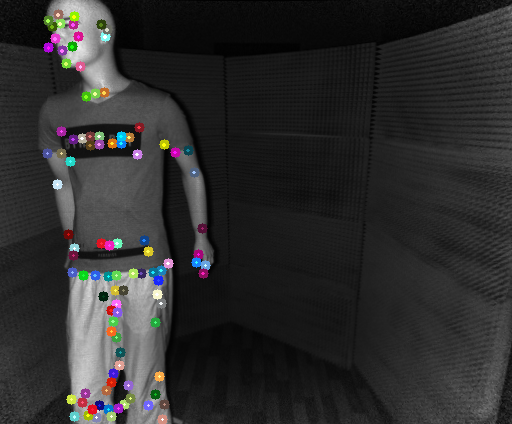 | 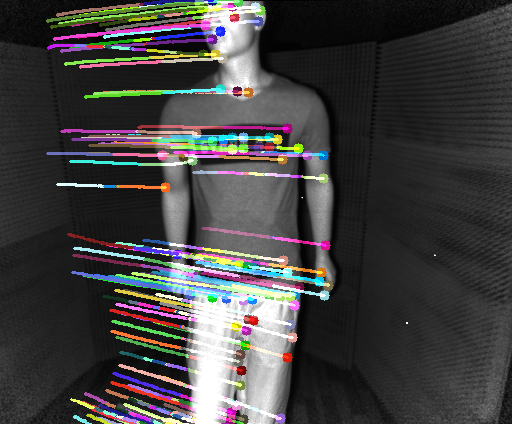 | 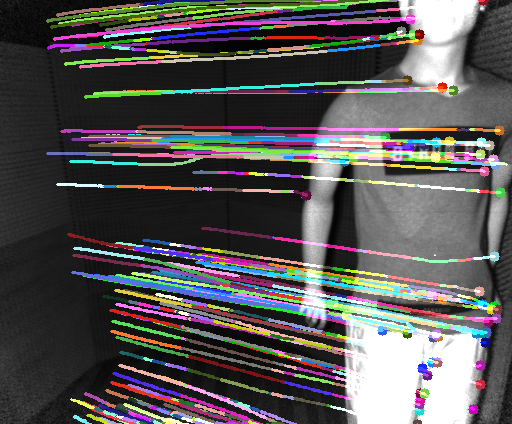 |
| 1er cuadro | Frame 101 | 201 marco |
|---|
| Seguimiento de un maniquí en una secuencia de cuadros obtenidos durante un experimento de simulación. |
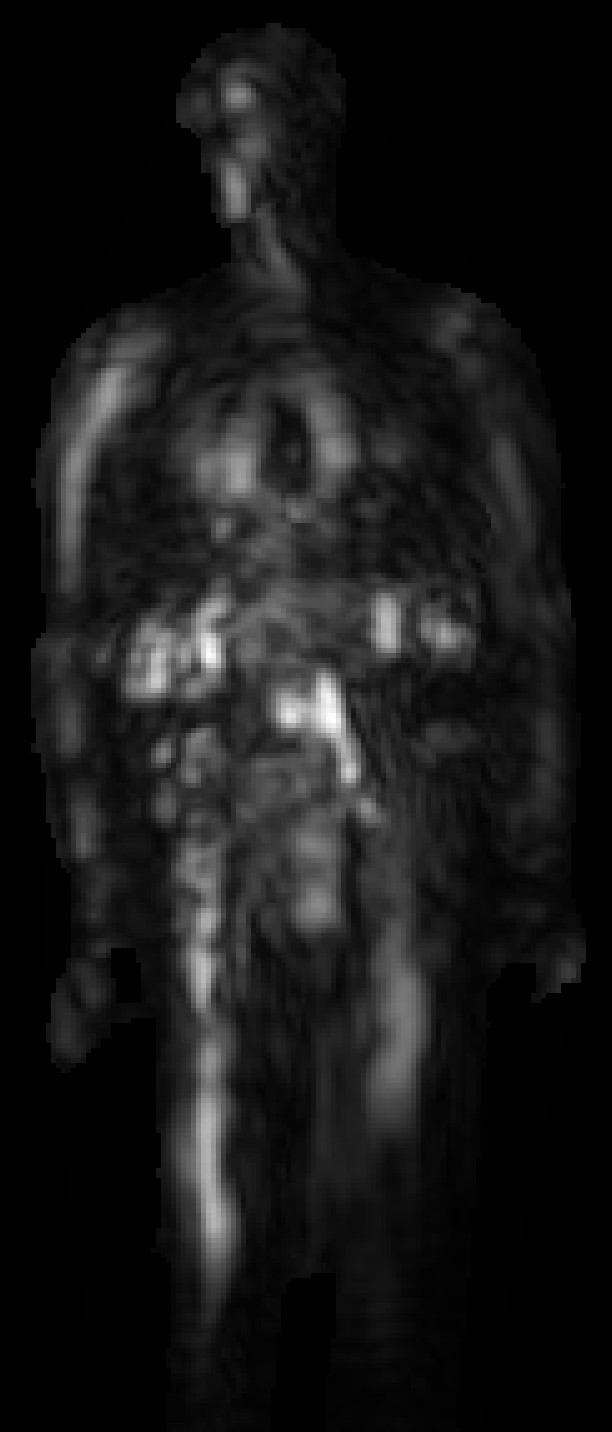
En la etapa actual del proyecto, se realizaron experimentos de simulación con un maniquí. La siguiente figura muestra un maniquí, debajo de cuya ropa se escondieron varios artículos que representan una amenaza: un cuchillo en un estuche, una pistola de gas detrás de un cinturón de tela y pedazos de jabón con tornillos en la superficie como un simulador de un dispositivo explosivo improvisado.

En un experimento de simulación con el maniquí que se muestra en la figura, se utilizó una señal con conmutación de frecuencia escalonada en el rango de 6 a 12 GHz con un escalón de frecuencia de 250 MHz, como resultado de lo cual la señal reflejada se grabó a 25 frecuencias. El maniquí se movió a intervalos de 1 cm a una distancia total de 100 cm utilizando el módulo de desplazamiento lineal. La línea a lo largo de la cual se escanearon las antenas también tenía una longitud de 100 cm con un paso de muestreo de 1 cm. El volumen total de datos de radar, por lo tanto, era una matriz de números complejos de 101-101-25. La distancia al maniquí varió de 150 a 110 cm a lo largo del eje óptico del sensor de video. La distancia promedio desde el maniquí hasta la línea de exploración de la antena fue de 80 cm.
La siguiente figura muestra la imagen de radar final obtenida al enfocar la secuencia de capas desde la superficie de la ropa hasta una profundidad de 2.5 cm y presentar los datos obtenidos en la capa de superficie mediante la proyección del valor máximo.
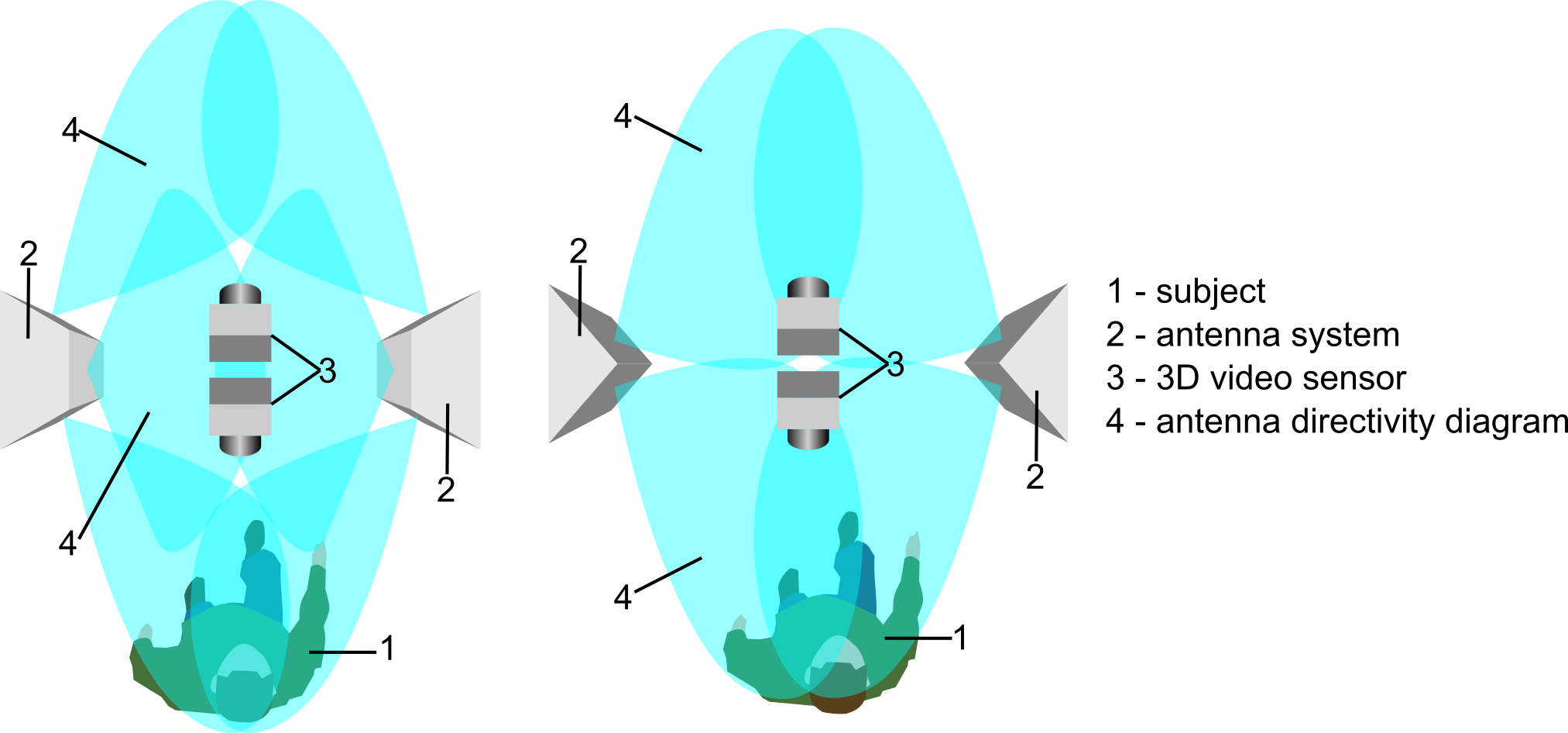 Las figuras muestran las opciones para un sistema de inspección con un número diferente de conjuntos de antenas lineales, un número suficiente del cual puede instalarse durante los experimentos de simulación en la instalación descrita sin crear un sistema de radar complejo con un número fijo de antenas y su ubicación. El número de conjuntos de antenas debería ser suficiente para obtener imágenes de radar para toda la superficie de la inspección.El siguiente paso para crear un sistema de inspección será el desarrollo de conjuntos de antenas lineales de alta velocidad para la recopilación de datos en tiempo real con el fin de realizar experimentos en una persona en movimiento. En lugar de un analizador de red vectorial, se utilizarán uno o más generadores de radiación de microondas sintonizables en frecuencia y un receptor en cuadratura.Un sistema de inspección por microondas de sintetizador de apertura inversa puede cambiar el enfoque de la seguridad del transporte terrestre, al igual que los escáneres de microondas han afectado la seguridad del transporte aéreo. La aparición en el mercado de dispositivos asequibles para la captura de video tridimensional de la escena observada hace posible implementar un sistema integral de detección de un flujo estructurado de pasajeros, que permitiría, sin ningún inconveniente, inspeccionar automáticamente a los pasajeros con ropa de abrigo en movimiento utilizando radiación segura de microondas.Como se mencionó anteriormente, los experimentos de simulación con la instalación producirán una técnica de animación de títeres. Al aplicarlo a los datos de radar, puede obtener una "película animada de radar" en la que se obtiene cada imagen de radar posterior integrando los datos recién recibidos con la imagen de radar anterior, lo que resulta en una mayor resolución. Después de ver la animación, puede ver que se puede obtener una imagen de radar detallada cuando el maniquí ha recorrido una distancia suficiente, formando una abertura sintetizada de longitud suficiente, que está en total conformidad con las disposiciones del radar clásico.
Las figuras muestran las opciones para un sistema de inspección con un número diferente de conjuntos de antenas lineales, un número suficiente del cual puede instalarse durante los experimentos de simulación en la instalación descrita sin crear un sistema de radar complejo con un número fijo de antenas y su ubicación. El número de conjuntos de antenas debería ser suficiente para obtener imágenes de radar para toda la superficie de la inspección.El siguiente paso para crear un sistema de inspección será el desarrollo de conjuntos de antenas lineales de alta velocidad para la recopilación de datos en tiempo real con el fin de realizar experimentos en una persona en movimiento. En lugar de un analizador de red vectorial, se utilizarán uno o más generadores de radiación de microondas sintonizables en frecuencia y un receptor en cuadratura.Un sistema de inspección por microondas de sintetizador de apertura inversa puede cambiar el enfoque de la seguridad del transporte terrestre, al igual que los escáneres de microondas han afectado la seguridad del transporte aéreo. La aparición en el mercado de dispositivos asequibles para la captura de video tridimensional de la escena observada hace posible implementar un sistema integral de detección de un flujo estructurado de pasajeros, que permitiría, sin ningún inconveniente, inspeccionar automáticamente a los pasajeros con ropa de abrigo en movimiento utilizando radiación segura de microondas.Como se mencionó anteriormente, los experimentos de simulación con la instalación producirán una técnica de animación de títeres. Al aplicarlo a los datos de radar, puede obtener una "película animada de radar" en la que se obtiene cada imagen de radar posterior integrando los datos recién recibidos con la imagen de radar anterior, lo que resulta en una mayor resolución. Después de ver la animación, puede ver que se puede obtener una imagen de radar detallada cuando el maniquí ha recorrido una distancia suficiente, formando una abertura sintetizada de longitud suficiente, que está en total conformidad con las disposiciones del radar clásico. Este trabajo fue apoyado por una subvención de la Russian Science Foundation No. 15-19-30012.
Este trabajo fue apoyado por una subvención de la Russian Science Foundation No. 15-19-30012.Literatura
- DL McMakin, PE Keller, DM Sheen, and TE Hall, «Dual-surface dielectric depth detector for holographic millimeter-wave security scanners,» in Proc. SPIE 7309, Orlando, Florida, USA, Apr. 2009. [ Online ].
- BN Lyons, E. Entchev, and MK Crowley, «Reflect-array based mmwave people screening system,» in Proc. SPIE 8900, Dresden, Germany, Oct. 2013. [ Online ].
- SS Ahmed, «Personnel screening with advanced multistatic imaging technology,» in Proc. SPIE 8715, Baltimore, Maryland, USA, May 2013. [ Online ].
- A. Beeri and R. Daisy, «System and method for volume visualization in ultra-wideband radar imaging system,» USA Patent 9 354 307, May, 2016. [ Online ].
- A. Zhuravlev, V. Razevig, A. Tataraidze, M. Chizh, S. Ivashov, and A. Ivashov, «Experimental setup to simulate the performance of ISAR-based microwave personnel screening system,» in 2016 IEEE International Symposium on Phased Array Systems and Technology (PAST), Boston, MA, USA, 2016, pp. 1-7. [ Online ].
- A. Zhuravlev, V. Razevig, M. Chizh, and S. Ivashov, «Imaging of concealed objects on moving persons by creating synthetic aperture due to their natural motion,» in 2017 IEEE International Conference on Microwaves, Communications, Antennas and Electronic Systems (COMCAS), Tel Aviv, Israel, 2017, pp. 1-4.