Las dificultades de construcción, cuánto cuesta el robot, las regulaciones, que parecen estar allí, pero en realidad no, y lo que está sucediendo en el programa.
Muchas de nuestras decisiones pueden parecer controvertidas, pero si las observa desde el punto de vista de los términos iniciales, todo parece un poco más lógico.
Atencion Debajo del corte muchas fotos.
Comenzamos a hablar sobre el robot el 25 de agosto y, de acuerdo con los requisitos iniciales de los organizadores, el robot terminado debería haberse presentado antes del 4 de septiembre. Entendimos perfectamente que este período se cambiaría, pero cuánto es una gran pregunta, y esto complicaría enormemente nuestras vidas. Mirando hacia el futuro, diré que el robot nos dejó a principios de octubre.
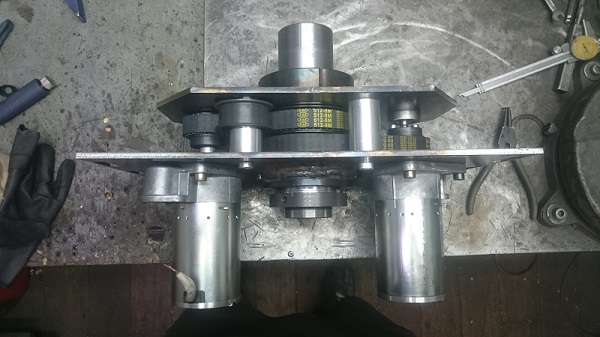 (reductor sin paredes)
(reductor sin paredes)Tipo de robot y limitaciones
Al elegir un concepto, solo miramos qué robots existen y cómo luchan:
- Flipper (robot, generalmente con volquete neumático). Una de las opciones más ganadoras, ya que puede volver a la posición correcta con su arma. Según las reglas, un robot que no se mueve durante mucho tiempo pierde. Desechamos esta opción debido a posibles dificultades con la neumática, no había especialistas en neumática en nuestro equipo y no había tiempo para alterar aún más.
- Un robot con una sierra vertical u horizontal. En casi todos los videos, estos robots se veían bien antes de la batalla, pero el arma se negó en el primer golpe y, en general, no causó daño a los oponentes, a excepción de los rasguños.
- Un arma en forma de hacha, un soporte en un soporte parece poco confiable y no es fácil perforar el metal de 5 mm permitido por las reglas.
- El robot bajo el ahora popular nombre "spinner" (un haz masivo que gira sobre el robot) nos pareció el más fácil de fabricar y contiene el menor número de momentos no verificados en el diseño.
- Los robots con un volante en el frente también están de moda ahora, pero son tecnológicamente similares a nuestra elección, y no tienen protección circular con armas.
De acuerdo con la normativa, existen dos limitaciones principales:
- peso - 110 kg;
- dimensiones no más de 1200x1200.
En este espectáculo, los milagros funcionaron con las regulaciones: estuvimos coordinados durante dos semanas con una pared de la caja de cambios del arma de 6 mm, y no con 5, ya que ya estaba cortada (aunque todo lo relacionado con el arma no tiene estas restricciones). Como resultado, se permitieron en su lugar robots con una pared de 10-15 mm y una altura de 100 mm con una altura mínima de 300 mm. En Rusia ahora, según tengo entendido, dos grandes organizaciones que realizan batallas de robots. Si desea participar en ambos proyectos, vale la pena recordar que estos últimos tienen dimensiones máximas de 1500x1000.
 (proceso de soldadura de cuchillas)
(proceso de soldadura de cuchillas)Gestión
De hecho, no hay muchas alternativas para la gestión. Haga el suyo o compre modelos confeccionados con radiocontrol. Pero en este caso, ni en términos de costo ni a tiempo veo ninguna razón para hacer lo mío, será más costoso y más largo, incluso teniendo en cuenta el hecho de que a bordo todavía hay componentes electrónicos de su propio diseño. Sí, y un control remoto ergonómico normal hace que sea un placer dudoso. De acuerdo con la normativa, el equipo debe ser compatible con la función a prueba de fallos, en caso de pérdida de una señal del transmisor, el receptor traduce todos los canales a un valor predeterminado (el arma se apaga, deteniendo el movimiento). Establecimos dos conjuntos de control y, en caso de daños en el principal, el sistema pasó del comando al respaldo desde el exterior.
Además, los sistemas de control antiguos no tienen un algoritmo para operar a diferentes frecuencias y operan en un canal fijo. En la práctica, esto condujo al hecho de que en las actuaciones de demostración un equipo no pudo alejarse: los micrófonos de radio y las transmisiones de video ocuparon el canal por completo.
 (neumáticos de potencia para motores de armas, juntas de PTFE)
(neumáticos de potencia para motores de armas, juntas de PTFE)Movimiento
De las opciones disponibles están los motores autopropulsados con controladores de carrera, una batería para tres minutos de batalla con un margen. Lo mismo ocurre con la mayoría de los equipos del mundo, después del motor, la caja de cambios y el último eslabón es la cadena a la rueda. Para nosotros, todo está bien, excepto la caja de cambios. No se podían encontrar en stock, pero para hacer de esto una gran capa de trabajo.
De disponible aquí y ahora había ruedas de motor de giroscopios. 4 ruedas de 350 vatios chinos cada una deberían haber sido suficientes con un margen y una garantía, por lo que básicamente salió, pero más sobre eso más adelante. De las dificultades que tomará esta ruta: el voltaje de las ruedas motrices de los giroscopios de 36 V, los reguladores modelo para ese voltaje generalmente son helicópteros y no tienen una marcha atrás, casi accidentalmente lo compramos. Para controlar los motores, puede hacer su regulador de inmediato con el control del modelo (de 1ms a 2ms en la salida del receptor, dependiendo de la posición de las perillas), pero tomaría más de dos semanas pagar el tablero, las partes y la depuración, e incluso al momento de la compra de los controladores de bicicleta, a juzgar por las revisiones, no hubo quejas, solo hicieron un convertidor PWM → 0-5V en las tarjetas de control.
En nuestra opinión, teniendo en cuenta la experiencia adquirida, la solución ideal para 110 kg del robot son dos ruedas y una potencia total de 800W.
 (cerrojo, un poco salvó nuestros brazos y piernas)
(cerrojo, un poco salvó nuestros brazos y piernas)Arma
En términos de potencia y redundancia, inicialmente decidimos que el rotor con martillos haría girar dos motores. Durante una semana, aparte de los arrancadores automáticos (1.5 kW, 12V), nada llegó a la mano. Esta decisión fue similar a atacar un rastrillo al rojo vivo. El coordinador técnico del proyecto, con gran duda, dijo que muchos lo intentaron antes que nosotros, pero no lo hicieron. Habiendo contado todo nuevamente, decidimos que todo estaría bien. Así que casi fue ... hasta los últimos días antes del envío. La velocidad de los arrancadores es de aproximadamente 3000 por minuto sin carga, y dado que es necesario permitir que los robots enemigos entren en el área de los martillos, y no solo arañarlos, decidimos reducir la velocidad a ~ 1500 con un engranaje de correa, que a una velocidad del enemigo de 10 km / h proporcionó un "enfoque" para 70 mm a la zona del martillo. El prototipo japonés tenía 7 motores pequeños que giraban un engranaje grande. Se eligió un engranaje de correa por razones temporales, las poleas están disponibles y las correas se ordenan en dos o tres días, además, esto era para proteger los motores de la destrucción cuando el rotor se detiene abruptamente.
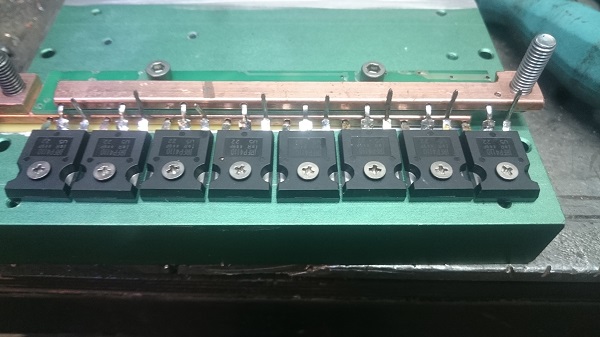
 (en la foto se muestra un ensamblaje de textolita y un rectificado con cepillo fabricados mediante CNC)
(en la foto se muestra un ensamblaje de textolita y un rectificado con cepillo fabricados mediante CNC)Electrónica
La mayoría de los robots tienen instalados componentes de modelos de radio, pero nos enfrentamos al hecho de que el relé del modelo comprado se enciende brevemente (100-200 ms) cuando se aplica alimentación, independientemente de la posición de los controles del transmisor. Teniendo en cuenta que en nuestro circuito se comenzaron a girar 30 kg de rotor, el uso de este relé era peligroso, pero como había un controlador a bordo de cada placa, trajeron otro canal del receptor y lo encendieron a través de un filtro.
 (proceso de pintura, algunas diferencias en el diseño de la primera opción de la final son visibles a la derecha)
(proceso de pintura, algunas diferencias en el diseño de la primera opción de la final son visibles a la derecha)Nombre del robot, equipo y logotipo.
Esta fue la tarea más fácil de todas. La mitad de nuestro equipo fabrica motocicletas personalizadas a pedido: tomaron su logotipo y nombre. La segunda mitad desarrolla electrónica para trenes eléctricos modernos, incluidos convertidores de tracción con una capacidad de más de MW.
 (amortiguador para proteger la caja de cambios y los motores)
(amortiguador para proteger la caja de cambios y los motores)Las dificultades que tenemos
De hecho, todo el robot son dos sistemas: tracción y armas. Tuvimos problemas con ambos.
En términos de tracción, todo estuvo bien, hasta que los martillos se instalaron en el rotor. Después de eso, el robot se negó categóricamente a darse la vuelta y los controladores comenzaron a quemarse.
No pudieron determinar rápidamente la causa del agotamiento del controlador, ya que no todos se quemaron. Pero una vez más escribo que no hubo tiempo y consideramos que los transistores de potencia se queman por sobretensión, ya que la inercia del robot es grande y el algoritmo del controlador podría ser defectuoso. Montamos un circuito con un chopper para drenar todas las sobretensiones a una resistencia, trajimos un osciloscopio, conectamos un chopper y vimos que el voltaje aumenta a un máximo de 5V. No hubo excesos en la corriente, más ideas también. Reemplazamos los transistores quemados con los normales, y ocurrió un milagro: no hubo más problemas con ellos ni siquiera en el programa. Es solo un lote defectuoso de transistores (aquí recordamos el caso cuando nos pusieron en producción microcircuitos vacíos en el interior, pero con marcado normal).
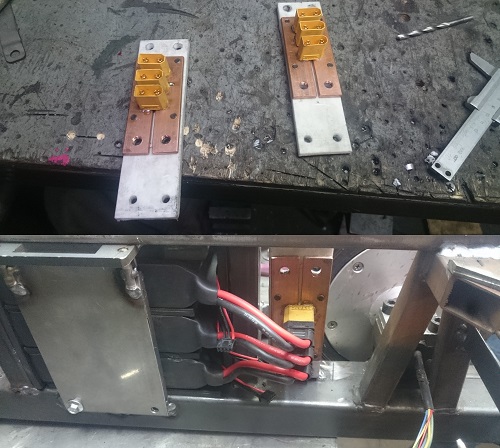
 (bus con transistores para el regulador actual, que al final no fue utilizado por nosotros, ya que funcionó al borde del sobrecalentamiento)
(bus con transistores para el regulador actual, que al final no fue utilizado por nosotros, ya que funcionó al borde del sobrecalentamiento)El segundo problema son las baterías de tracción. En términos de economía y asequibilidad, los tomaron de giroscopios. Todos son buenos, excepto por la corriente máxima. En promedio, dicha batería no da más de 50 A y se apaga cuando está sobrecargada. Nosotros, en la cima, necesitábamos más, ya que una batería para dos controladores (las ruedas delanteras y traseras se accionan y controlan por separado para respaldo). Tuve que desarmar la batería y desconectar esta protección físicamente, pero vale la pena entender que este es un método controvertido y que está permitido solo para sobrecargas muy cortas y raras.
Sobre cuatro ruedas, para desplegar 100 kg en el lugar, según mis sentimientos, necesita al menos honesto 1.2 kW. En dos, este requisito cae bruscamente a 500W. Las maniobras incluso para un robot de "defensa circular" demostraron ser muy importantes. Subestimamos este factor y ahora estamos transfiriendo el robot a una versión de dos ruedas.
Lo más "agradable" nos estaba esperando después de que les mostramos a los organizadores un robot terminado, pero sin martillos en las cuchillas. Es decir, técnicamente se permitió el robot, pero de hecho los arrancadores quemaron 7-12 segundos después del lanzamiento, y los martillos tuvieron suerte en el último momento.
Se tomaron varias medidas: rectificado de conjuntos de cepillo, producción de un portaescobillas de plástico fundido a partir de PCB sobre PCB. Estas medidas redujeron significativamente las pérdidas, pero la potencia de salida fue demasiado alta.
 (fin de la instalación)
(fin de la instalación)Quedaban tres días antes del envío, un regulador de corriente confiable a 200 A, para este período, no fue posible hacerlo desde las partes que estaban en San Petersburgo, pero no se pudo encontrar la entrega en un día. Tuvimos que dar un paso desesperado, reducir la velocidad en más de dos veces, despedirnos de la reserva de armas y encender los motores secuencialmente. Estas medidas ayudaron en el acto, no hubo más problemas con los motores. Por el momento, sin prisa, estamos buscando otros motores. Los iniciadores funcionan de manera estable, pero su uso no puede justificarse por nada más que términos (en total para pruebas y existencias, compramos 7 iniciadores).
Costo
El costo final del robot es de aproximadamente 230 tr. Esto es con todas las piezas de repuesto, controles duales, arrancadores quemados y todo lo demás. Si se hace en un ritmo más tranquilo, creo que puedes cumplir con los 190 mil. El archivo está funcionando, por lo que no todo está dividido en secciones, pero no está ajustado.

Mostrar
Como resultado, participamos en 3 batallas. Esta es una destrucción demostrativa del monitor, una batalla de calificación y una batalla demostrativa del asistente German Gref y alguien del gobierno. Como no tengo los derechos para transmitir el programa, insertaré un video con la destrucción del televisor, filmado por nosotros:
En la 3ra batalla, el rotor nos arrancó, y el eje con el rodamiento fue arrancado del enemigo. Cambiamos los tornillos por otros más poderosos, pero de hecho fue el caso más difícil, ya que la matanga del enemigo estaba girando en la dirección que nuestro rotor estaba mirando.
De una inolvidable reparación nocturna de un robot en las cajas de la fórmula uno:

Juzgar dejó muchas preguntas, y no solo a nuestro equipo. En nuestra batalla, a un robot se le permitió participar, inicialmente con armas que no funcionaban, lo que continuó. Los organizadores nos ofrecieron "peleas controvertidas" bastante extrañas para aquellos que abandonaron dudosamente, pero nos negamos, porque aprobamos o no. No hay un segundo pez.
Con la admisión de robots también vale la pena pensar mucho. Cuando más de un tercio de los robots no siguen las reglas, pero se les permite ingresar a la red principal, esto es extraño y ciertamente no conduce a una mayor confianza.
Hay frases generales en la regulación que "un robot no debe ser indestructible". Esta frase debe eliminarse o aclararse. Tome el ganador: esta es una aleta perfectamente ensamblada con un marco tubular, ¿qué es destructible para él? Dado que su plataforma elevadora se considera un arma, en un principio un engrosamiento de más de 5 mm. Flippers ganó el año pasado. Por interés en el programa, claramente vale la pena considerar la posibilidad de igualar las posibilidades para no obtener algunas aletas en los próximos shows: la batalla de dos aletas es una vista bastante aburrida. Basado en la "oferta de crítica", veo una solución para eliminar los lados, ya que la aleta simplemente arroja a todos los oponentes allí y la batalla se decide en los primeros segundos. El hecho de que el ganador este año arrojó los robots de vuelta fue su buena voluntad y no el hecho de que otros harán lo mismo, pero esto afecta en gran medida la impresión del espectáculo. Los tornillos también se deben colocar cerca del vidrio, de lo contrario, el único tipo de robot que se puede lanzar allí es la aleta.
El espectáculo para el público fue genial. Sonido, luz, guión: realmente genial y emocionante. Bailarines brillantes: la idea no es nueva, pero la vi en vivo por primera vez y también se aferró a ella (logramos arreglar uno de estos trajes unos segundos antes de la presentación en el espectáculo final, a pesar de que no participamos en él, al menos de alguna manera) . Estoy agradecido con aquellas personas que llevaron a cabo una gran cantidad de trabajo. El listón se ha elevado extremadamente alto, seguiremos el desarrollo de los eventos.
P.S. El artículo resultó un poco sobre el robot y un poco sobre el programa, pero en mi opinión, no recurrí a dos artículos separados, y diluirlos con lo genial que visitamos Skype Park, Rosa Khutor y a quienes conocimos sería una decisión dudosa para un recurso técnico.