 Una de las opciones para los músculos artificiales se puede ver en la parte superior de la foto (dos tubos). Levantan un neumático de automóvil que pesa 22 kg. Foto: Instituto de Tecnología de Massachusetts
Una de las opciones para los músculos artificiales se puede ver en la parte superior de la foto (dos tubos). Levantan un neumático de automóvil que pesa 22 kg. Foto: Instituto de Tecnología de MassachusettsLos "músculos" artificiales afirman ser unidades seguras y potentes para muchos dispositivos diferentes: desde máquinas convencionales hasta electrónica implantable y robótica. Pero a menudo el diseño y la producción de tales "músculos" es demasiado complejo y costoso, lo que limita su uso. Un grupo de científicos del Instituto de Tecnología de Massachusetts y la Universidad de Harvard han desarrollado un
diseño de unidad biocompatible
extremadamente simple que cuesta
menos de un dólar , pero lo suficientemente potente como para un dispositivo tan primitivo.
Las unidades se pueden hacer de diferentes materiales y diferentes tamaños utilizando un diseño publicado en estilo origami. Trabajan en el aire, bajo el agua, en el vacío.
El concepto básico del nuevo dispositivo incluye solo un marco compresible, una carcasa externa ("piel") y un relleno, que puede ser cualquier material fluido, como aire o agua.
Los experimentos han demostrado que tales unidades pueden comprimir hasta el 10% de su longitud máxima, pueden soportar cargas de hasta 600 kPa y la potencia específica máxima supera los 2 kilovatios por kilogramo. Esto corresponde aproximadamente o incluso excede el poder específico de los músculos humanos.
 Diseño, proceso de fabricación y unidades multiescala resultantes.
Diseño, proceso de fabricación y unidades multiescala resultantes.El trabajo de los músculos artificiales, así como el proceso barato de su producción se muestra en la ilustración de arriba.
Leyenda(A) Actuadores lineales en miniatura que utilizan estructuras de origami en zigzag hechas de polieteretercetona (PEEK) como marcos y película de PVC como "piel". Debido al uso de materiales biocompatibles, tales unidades son adecuadas para su uso en implantes médicos y dispositivos electrónicos portátiles. (B) Una unidad grande y potente montada en un marco en zigzag hecho de planchas de impresión de nylon. La "piel" está hecha de nylon recubierto con poliuretano termoplástico. Una rueda de automóvil que pesa 22 kg se eleva a una altura de 20 cm en 30 segundos (
video ). (C) El principio de funcionamiento del convertidor. La contracción muscular ocurre principalmente debido a la fuerza de tensión de la "piel". Esta fuerza se crea por la diferencia de presión entre el medio fluido interno y externo. Eliminar el fluido del actuador aumenta temporalmente la presión interna. (D) Proceso de producción. Una unidad estándar se puede producir rápidamente en tres simples pasos: crear un chasis utilizando cualquiera de una variedad de métodos de producción; preparación de la "piel"; sellado de una capa estanca al agua.
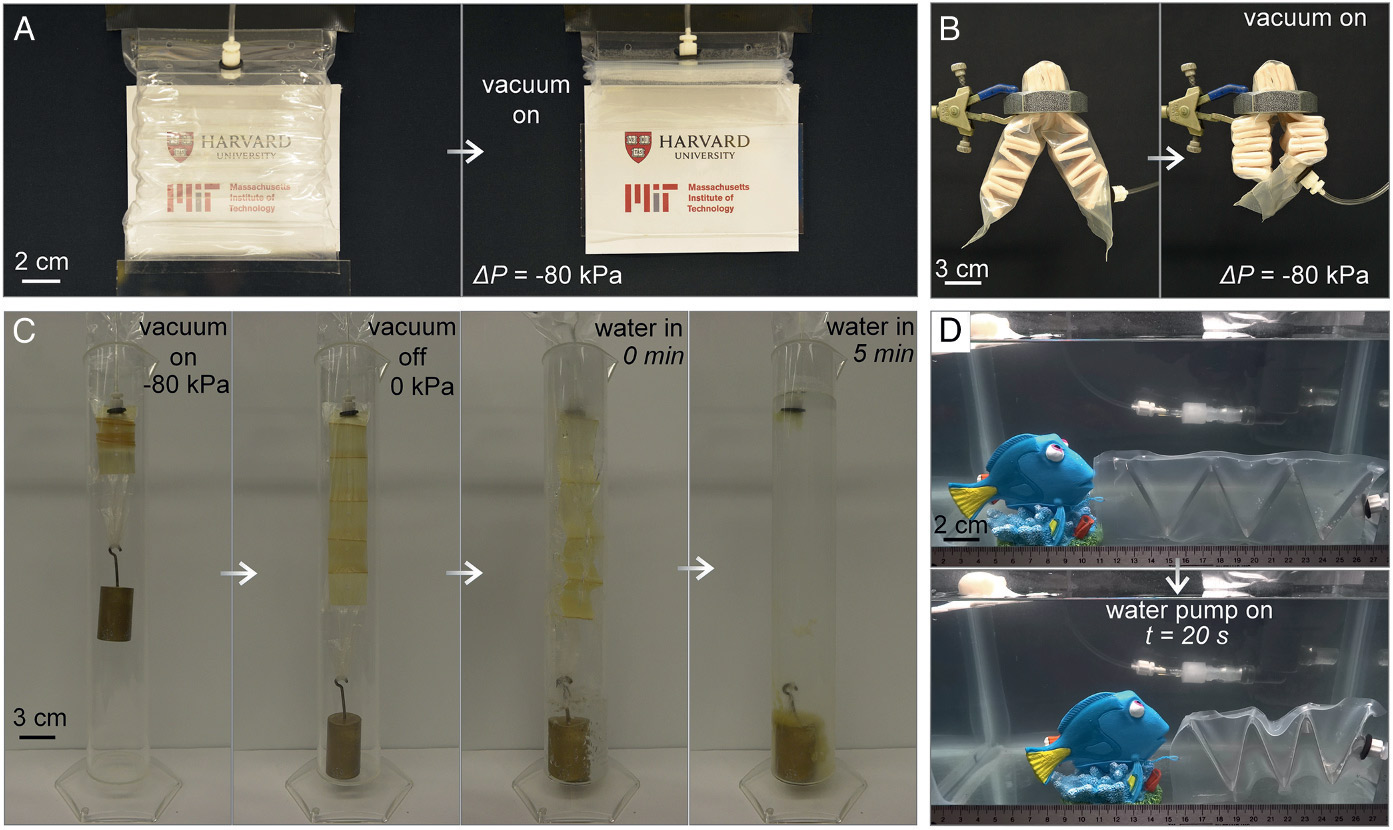 Accionamientos lineales en zigzag realizados por diferentes métodos a partir de diferentes materiales.
Accionamientos lineales en zigzag realizados por diferentes métodos a partir de diferentes materiales.La Parte A muestra una unidad delgada y transparente que levanta una placa acrílica. Aquí, el marco está hecho de una lámina de poliéster transparente de 0.254 mm de espesor mediante corte por láser y plegado manual. Cuero: Película de PVC transparente (vinilo) de 0.102 mm de espesor. Material fluido: aire.
En la Figura B, un accionamiento lineal suave funciona bien incluso cuando está bloqueado en una tuerca de metal. Estructura y cuero: caucho de silicona y poliuretano termoplástico de 0.24 mm. Material fluido: aire.
En la Figura C, una unidad soluble al vacío se disuelve en agua caliente a una temperatura de aproximadamente 70 ° C en cinco minutos. Tanto el marco como el cuero están hechos de acetato de polivinilo. Material fluido: aire.
Finalmente, la última ilustración muestra que una unidad con agua en lugar de aire como material fluido en un marco de acero funciona con éxito bajo el agua, en particular, mueve un pez de 3,5 cm.
"Los actuadores como los músculos artificiales son una de las tareas más importantes en general en ingeniería", dice el doctor Rob Wood, uno de los cuatro autores del trabajo científico. "Ahora hemos creado unidades con características similares a los músculos reales, por lo que puede imaginar la fabricación de casi cualquier robot para casi cualquier tarea".
El artículo científico fue
publicado el 27 de noviembre de 2017 en la revista
Proceedings of the National Academy of Sciences (doi: 10.1073 / pnas.1713450114,
pdf ).