En una publicación anterior, presenté una descripción general de la historia de los diseñadores de ingeniería fischertechnik desde 1965 hasta 2017, y ahora, de acuerdo con los deseos de los lectores, publico una descripción general del conjunto 524328 ROBOTICS TXT Discovery.

Constructor 524328 está destinado a niños y niñas interesados en mecánica, automatización, programación, visión por computadora o, como dicen ahora, en robótica.
La caja de cartón contiene piezas mecánicas, motores, un controlador TXT programable, una cámara de video, software ROBO Pro, instrucciones de montaje y un pequeño libro en formato PDF con material educativo.
Además, para trabajar con el diseñador, necesitamos un paquete de baterías 34969, que incluye una batería NiMH y un cargador.
Sin embargo, antes de pasar a una descripción detallada del kit, le sugiero que se familiarice con la historia del primer diseñador fischertechnik dedicado a la robótica.
Antecedentes
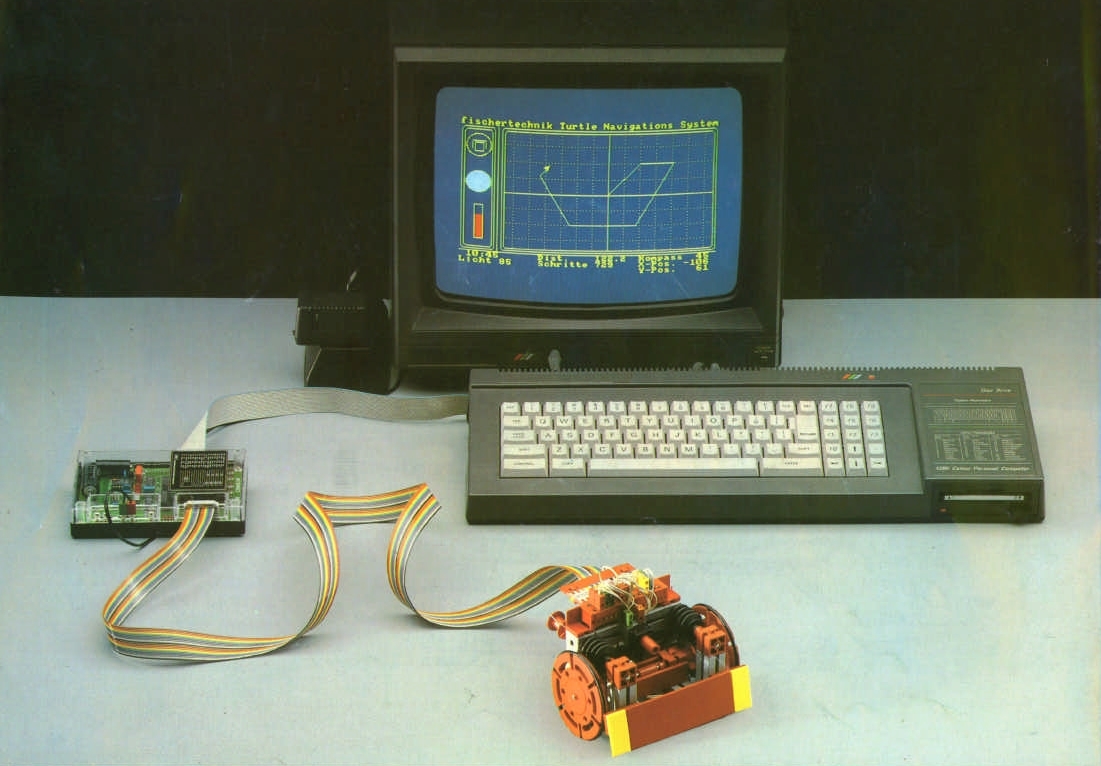
El primer diseñador basado en fischertechnik dedicado a la robótica móvil apareció en 1983 como parte de un proyecto educativo experimental realizado en ese momento en el Reino Unido.
La empresa Economatics, trabajando en el proyecto, llamó la atención sobre el trabajo de un joven científico del MIT Seymour Peypert (1928-2016), quien, al predecir la magnitud de la revolución inminente en el campo de la tecnología informática, sugirió comenzar a introducir a los niños a las computadoras desde una edad temprana utilizando la capacitación desarrollada por su equipo lenguaje de programación Logo .
Una característica importante de Logo fue la interfaz amigable del entorno de tiempo de ejecución y la presencia en este entorno de un objeto de control virtual: una "tortuga" gráfica que, de acuerdo con los comandos del programa compilado, podría moverse por la pantalla de la computadora, dejando un rastro. Por cierto, este trabajo del Sr. Peypert se ha transformado muchas veces y ha sobrevivido hasta el día de hoy en la forma de un entorno de programación de aprendizaje llamado Scratch (hablaremos de esto más adelante).
Entonces, en la solución que se propuso como resultado, se propuso reemplazar la tortuga virtual con un objeto muy real: un carrito móvil. Por lo tanto, los estudiantes tienen la oportunidad no solo de familiarizarse con las tecnologías de programación, sino también de aprender los conceptos básicos de la robótica. Entonces apareció el primer set de BBC Buggy:
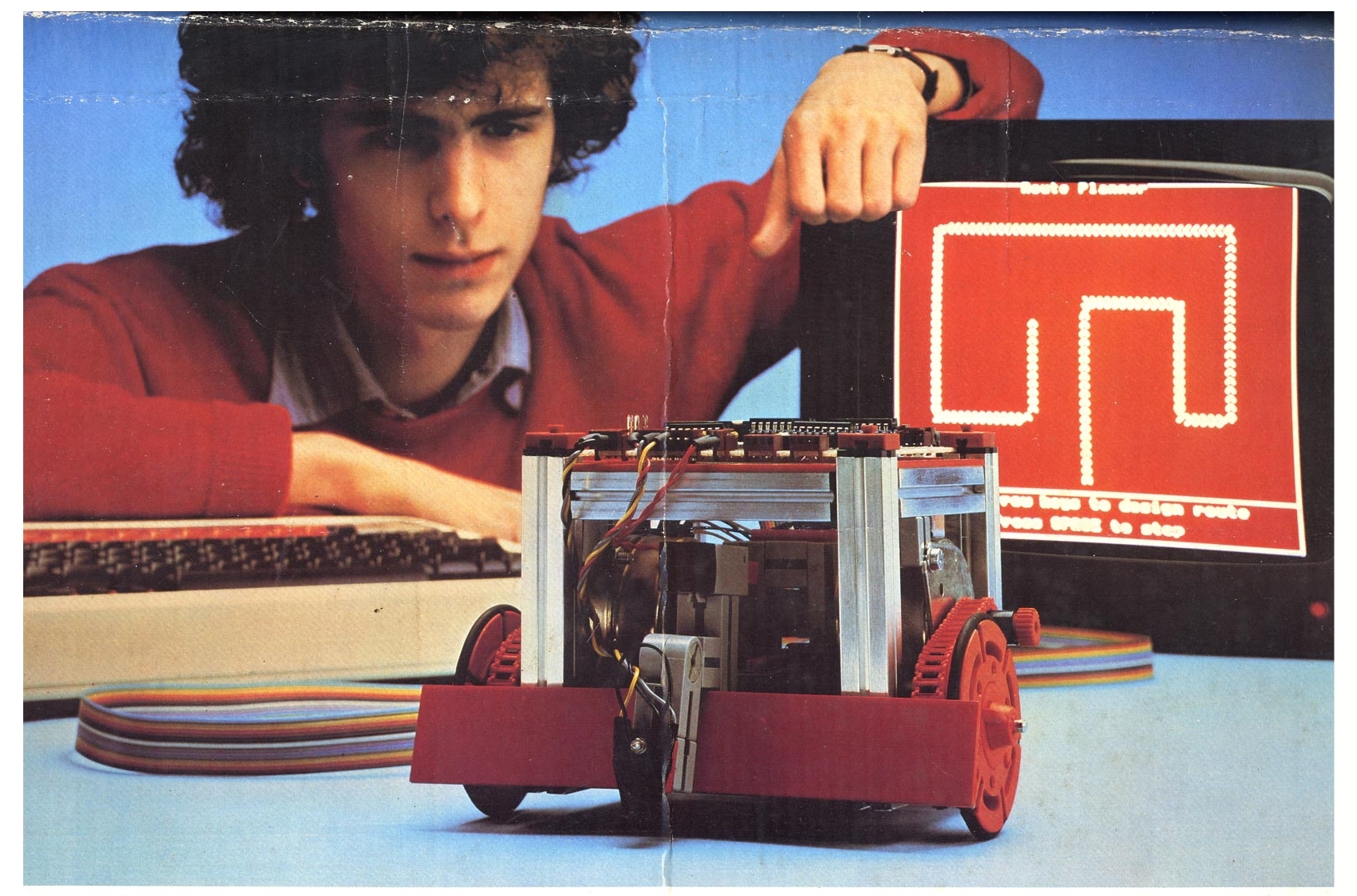
El kit incluía piezas fischertechnik para ensamblar el carro, un tablero de control, un transportista con ejemplos de programas de control e instrucciones con tareas de capacitación. La placa de control se conectó a la computadora mediante un cable plano. Podemos decir que fue un proyecto conjunto fischertechnik + Economatics.
Fischertechnik lanzó el primer kit de experimento de robot totalmente propietario en 1987: el 39502 Computing-Experimental. Desde el conjunto, fue posible construir varias variantes de máquinas automáticas y probar los algoritmos de control de programación.
Esto fue seguido por la próxima generación de diseñadores y conjuntos adicionales para la expansión funcional, pero esta es una historia que requiere un artículo separado. Hoy sugiero echar un vistazo más de cerca al conjunto actual: conjunto 524328 ROBOTICS TXT Discovery
524328 ROBOTICS TXT Discovery set
Designer 524328 consta de 310 partes, a partir de las cuales se pueden construir 14 modelos para experimentos. Además de las instrucciones de ensamblaje y un CD con el software ROBO Pro, la caja también contiene espacios en blanco para ensamblar un terreno de prueba para probar robots móviles. Tradicionalmente, el conjunto va acompañado de un mini libro en formato PDF, desde el cual puede obtener información básica del campo de la robótica.
Apariencia del embalaje:

Dentro de la caja de cartón, las partes se almacenan en dos alojamientos de plástico en compartimentos separados. Si lo desea, también puede comprar un sistema de almacenamiento patentado y usar sustratos para clasificar las piezas que se cortan fácilmente con tijeras de las instrucciones de montaje.
Para usar en tazas y escuelas, este diseñador se empaca en recipientes de plástico Gratnells más convenientes y duraderos y tiene otro número de pedido: 533018.

Además de elementos estructurales simples, la lista de partes incluye dos servomotores con codificadores incorporados, un motor de CC convencional con una caja de cambios externa, un fototransistor, un termistor, buses, LED y una bola naranja para experimentos con un sistema de visión por computadora:

(haciendo clic en la imagen - hirez)
Controlador TXT programable
La unidad de control en el diseñador 524328 está hecha en forma de una computadora compacta construida sobre la base del procesador ARM Cortex A8 y una placa de entrada-salida integrada en el ARM Cortex M3. Para interactuar con el usuario, la unidad tiene una pantalla táctil a color de 2.4 pulgadas, 320x240 con luz de fondo. Además, la computadora tiene un altavoz incorporado y RTC con energía de respaldo de una batería de litio.
Controlador TXT:

El controlador TXT se ejecuta bajo el sistema operativo kernel de Linux. Si lo desea, puede iniciar su sistema operativo desde una tarjeta de memoria micro-SD enchufable.
El recuerdo
- 128 MB de RAM DDR3
- 64 MB FLASH
- Micro sd
- Dispositivo de almacenamiento masivo USB
Comunicaciones
Las interfaces del controlador tienen las siguientes interfaces:
- Bluetooth 2.1 EDR + 4.0
- WLAN 802.11 b / g / n
- Mini conector USB para conectar a una computadora
- Conector USB-A con función de controlador host para conectar una cámara USB, unidad flash USB y otros dispositivos.
- Fotodetector IR para el control remoto del kit "Kit de control remoto"
- Interfaz I2C
- Interfaz UART
- Interfaz CAN
Entrada-salida
- Entradas universales: 8 piezas digitales / analógicas 0-9V o 0-5 kOhm
- Entradas de conteo: 4 piezas (0-9V Fin <1 kHz)
- Salidas universales (PWM 9V / 0.25A): 8 piezas
Por si acaso, los interiores del controlador TXT se pueden ver en la imagen a continuación:
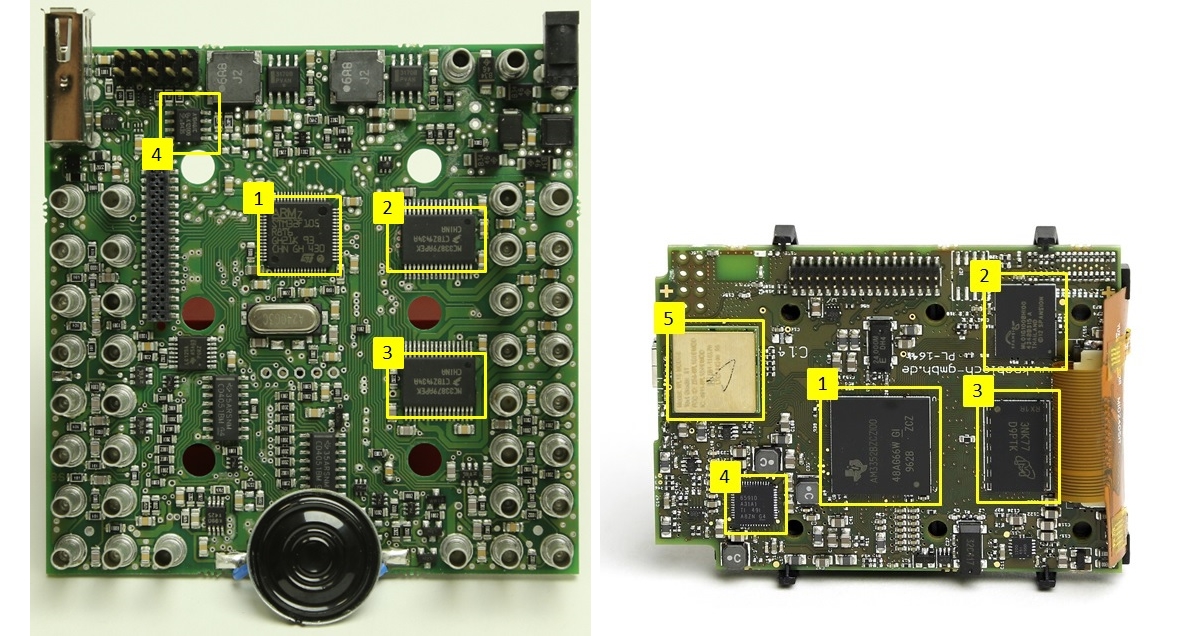
En la placa de circuito izquierda:
- ST STM32F105R8T6 - Microcontrolador ARM Cortex-M3.
- MC33879 - controlador de salida.
- MC33879 - controlador de salida.
- TJA1040 - Controlador serie de bus CAN.
En la placa de circuito derecha:
- TI AM3352B - Microcontrolador ARM Cortex-A8.
- Spansion ML01G100 - SLC NAND FLASH 64MB.
- Samsung K4B2G - DRAM DDR3L 1600 128 MB
- TPS65910 - módulo de gestión de energía.
- WL18MODGB (5) módulo combinado WiFi + Bluetooth.
Una característica importante de este kit es la disponibilidad de hardware y software para experimentos con visión artificial. Para hacer esto, el kit tiene una cámara de video con una interfaz USB, y el software de la herramienta ROBO Pro tiene una biblioteca de funciones de visión por computadora y un configurador para la configuración y la puesta en servicio.

La biblioteca de visión por computadora contiene las siguientes funciones básicas para procesar cuadros de video:
- Cálculo del brillo promedio de una región determinada de un cuadro de video.
- Busque una secuencia de elementos ráster del mismo color para una región determinada de un cuadro de video.
- Busque una figura geométrica, cálculo de coordenadas y tamaños.
- Un detector de movimiento en una región de un cuadro de video.
El configurador del subsistema de visión por computadora incluido en el software ROBO Pro:

Software de herramientas ROBO Pro
Para desarrollar programas de control para el controlador TXT, se propone utilizar el software de herramientas educativas ROBO Pro, que incluye un editor de diagramas de bloques de algoritmos, una biblioteca de elementos básicos del programa, una biblioteca de funciones de aplicación, herramientas para la puesta en marcha y control remoto. El software ROBO Pro es parte del kit de diseño. Por separado, no es obligatorio comprarlo.
Por lo general, la ventana del editor se parece a la imagen a continuación:
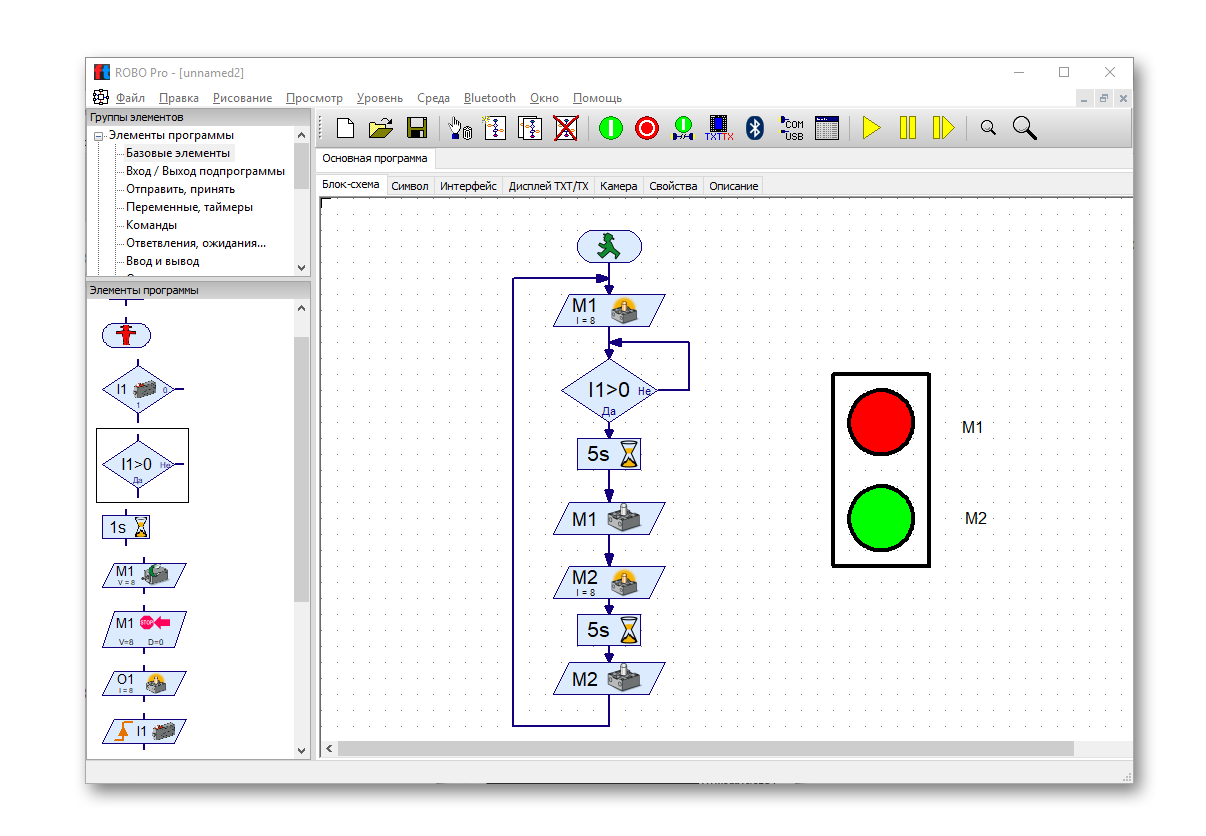
Los algoritmos de control se compilan en forma de diagramas de flujo clásicos convencionales, como es habitual en la literatura especializada de TI y la documentación técnica. Usted, por supuesto, puede preguntarme razonablemente: ¿Qué pasa con Scratch? ¿Por qué está en la documentación de los algoritmos MK ATMEL o PLC SIMATIC representados en forma de diagramas de flujo y no en forma de circuitos de memoria virtual? Aquí, apenas puedo responderte razonablemente. Sin embargo, mi ingeniero interno está encantado con la oportunidad de utilizar una herramienta visual generalmente aceptada de una manera natural para el primer contacto de niños con tecnologías de control automático.
Por si acaso, los algoritmos de la documentación técnica :

Los diagramas de flujo compilados en el editor se pueden ejecutar en dos modos: localmente en la máquina instrumental o de forma remota descargándolos a la máquina de destino. El primer método es conveniente para la depuración. durante la ejecución del algoritmo, puede usar la ejecución paso a paso y resaltar el paso actual del algoritmo.
Para usuarios avanzados, ROBO Pro tiene soporte para algoritmos de subprocesos múltiples. También se admite la descomposición de algoritmos en procedimientos, y también hay elementos de interfaz de usuario que se pueden colocar directamente en las hojas de diagramas de flujo.
La biblioteca de elementos de la interfaz de usuario tiene una grabadora / osciloscopio, medidores de marcación y campos para la entrada y salida de valores digitales. Esta es una característica muy importante tanto para principiantes como para usuarios avanzados. La capacidad de registrar datos en tiempo real y el análisis posterior simplifican enormemente el estudio de nuevos algoritmos de control y reducen significativamente el tiempo de configuración.
Así es como se ve la ventana del editor con un proyecto más complejo:
Conjuntos adicionales
La funcionalidad del kit 524328 se puede ampliar con kits adicionales de la serie ROBOTICS:
Se diferencian del constructor 524328 en ausencia de un controlador TXT. Se supone que la transición a estos conjuntos ocurre después de resolver todos los problemas del conjunto 524328.
Ejemplos de proyectos
Preparé varios videos que revelan algunas (pero de ninguna manera todas) de las posibilidades del constructor estándar TXT Discovery set sin detalles adicionales. Todos los proyectos de los ejemplos están en el github . Estaré encantado de responder a sus preguntas en los comentarios.
Dos algoritmos simples de semáforo:
Control remoto utilizando elementos de la interfaz de usuario y transmisión de video en ROBO Pro:
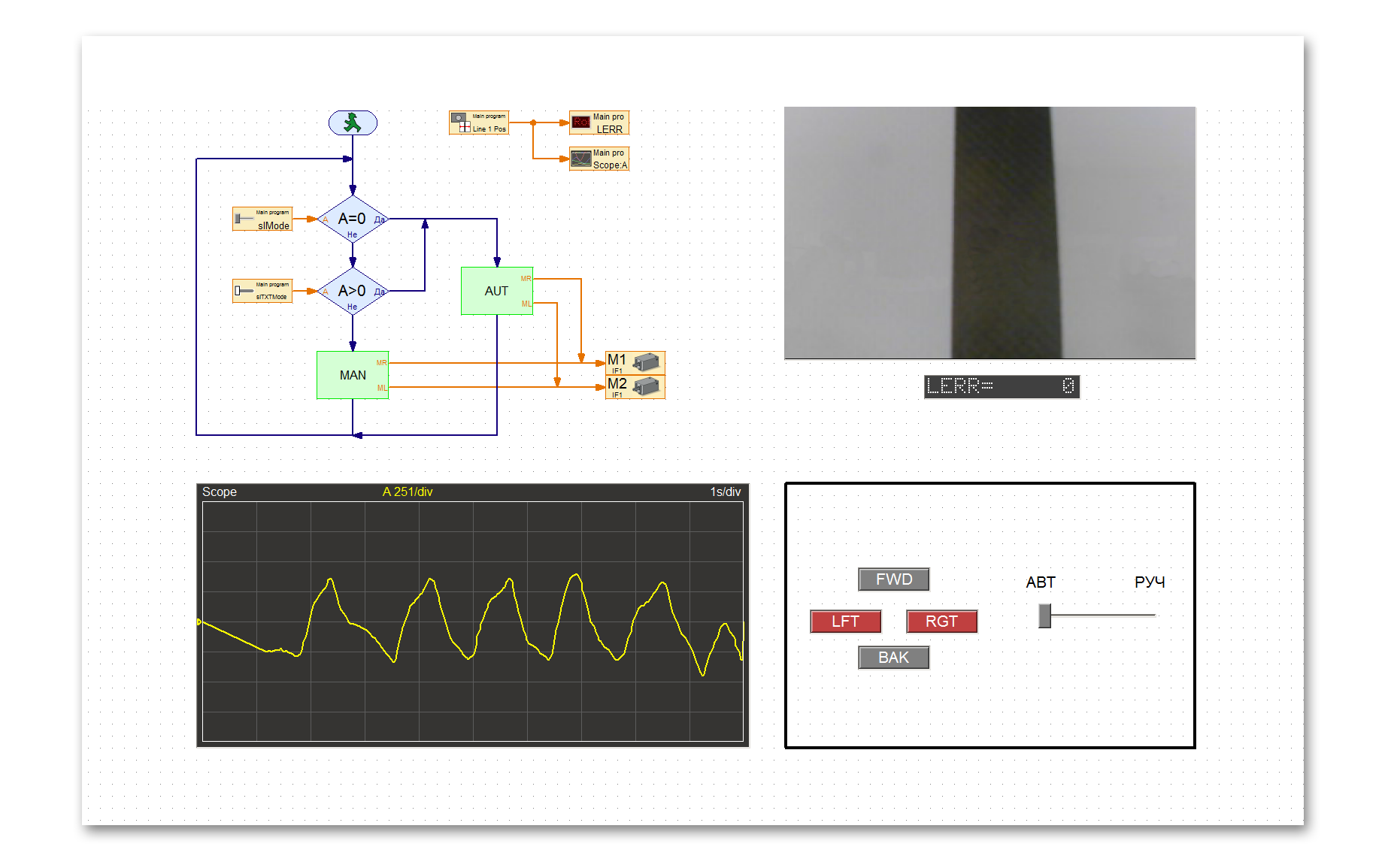
Control automático del carro con retroalimentación basada en visión por computadora. Se utiliza la ley proporcional de la regulación. La ganancia del enlace proporcional KP = 3.5. Se puede ver que el carro se mueve inestablemente a lo largo de la ruta: se balancea y finalmente abandona la pista. Presta atención al registrador de parámetros. Le permite cuantificar el valor de sobreimpulso después de detener el movimiento:
La razón del comportamiento inestable es que cuando el carro gira, aparecen fuerzas de inercia que continuarán girando el carro incluso si la acción de control desde el enlace proporcional es cero. Como resultado, vemos cómo el carro desliza la línea y luego comienza a girar en la dirección opuesta: se producen oscilaciones en el sistema dinámico. Este comportamiento reduce en gran medida la calidad del control y, en algunos casos, puede provocar fallas.
Para contrarrestar las fuerzas de inercia, se agrega un elemento diferenciador a la estructura del controlador, que forma una señal proporcional al cambio en el desajuste en la entrada del controlador. Establezca el coeficiente KD = 6.0 y vea cómo se comporta el carro:
Ahora el robot pasa constantemente la pista. Preste atención a la señal verde en la grabadora: esta es la señal de salida del enlace diferencial del regulador, que ayuda a "ralentizar" el giro del robot cuando vuelve a la trayectoria.
Conclusión
Arriba, di varios ejemplos del uso del conjunto 524328 ROBOTICS TXT Discovery para organizar ejercicios prácticos sobre la teoría del control automático. Los ejemplos dados fueron muy secos y carentes de cálculos teóricos. Creo que en una de las siguientes publicaciones podré compartir mis mejores prácticas con respecto a la organización de clases prácticas en automatización utilizando constructores fischertechnik. ¿Estarías interesado en esto?
Como de costumbre, para los amantes de la ingeniería que han dominado toda la publicación, un descuento del 15% en el código gktms1712 hasta el 31/12/2017 inclusive en la tienda Pakpak . ¡Gloria a los robots!
Referencias
- La historia de la tortuga de entrenamiento de buggy de la BBC de 1983
- Seymour Papert - inventor del lenguaje Logo
- Compilación de SO personalizada para el controlador TXT
- Scratch para el controlador TXT
- Python para controlador TXT