Hola a todos Nuestro departamento se encargó de presentar la interfaz digital DALI. Además, una presentación que demuestra el funcionamiento de esta interfaz. Si es necesario, entonces es necesario. Lo que simplemente no hicimos. Para este propósito, se proporcionaron dos módulos de control para luminarias LED. Ambos fueron conducidos. ¿Qué hay del maestro? Comenzamos a elegir un controlador para controlar esta interfaz. Como resultado, el precio es alto o el tiempo de entrega es el mismo. Y las vacaciones se acercan, y no quiero posponerlas más. Una vez más, observamos las características y llamamos la atención sobre las características de este protocolo digital:
- DALI es un protocolo abierto;
- DALI es un bus descentralizado, es decir, no tiene un controlador central y permite cualquier topología.
Todo esto parecía muy atractivo y la tarea parecía completamente no difícil. A primera vista. Decidimos hacer maestros DALI en Arduino.
Muchas gracias a Timur Nabiev por su
publicación en Habré . Por favor lee. No me repetiré, prescribió una buena teoría. Diseño de interfaz: no es más fácil. Pero con la biblioteca que publicó, algo no funcionó muy bien para nosotros.
Por lo tanto, decidimos hacer nuestros bocetos. Hicieron dos. El primero es asignar direcciones cortas a todos los "miembros" de la red.
Vista#define DALI_TX_PIN 3 #define DALI_RX_PIN A0 #define LED_PIN 13 #define RESET 0b00100000 #define INITIALISE 0xA5 #define RANDOMISE 0xA7 #define SEARCHADDRH 0xB1 #define SEARCHADDRM 0xB3 #define SEARCHADDRL 0xB5 #define PRG_SHORT_ADDR 0xB7 #define COMPARE 0xA9 #define WITHDRAW 0xAB #define TERMINATE 0xA1 #define START_SHORT_ADDR 2 #define DALI_ANALOG_LEVEL 650 #define DALI_HALF_BIT_TIME 416 //microseconds #define DALI_TWO_PACKET_DELAY 10 //miliseconds #define DALI_RESPONSE_DELAY_COUNT 15 // // uint8_t ShortAddr = START_SHORT_ADDR; void setup() { pinMode(LED_PIN, OUTPUT); digitalWrite(LED_PIN, LOW); pinMode(DALI_TX_PIN, OUTPUT); digitalWrite(DALI_TX_PIN, HIGH); Serial.begin(115200); DaliInit(); } //----------------------------------------------------- void loop() { } //----------------------------------------------------- void DaliInit() { Serial.println("Initialization..."); DaliTransmitCMD(RESET, 0x00); delay(2*DALI_TWO_PACKET_DELAY); DaliTransmitCMD(RESET, 0x00); delay(2*DALI_TWO_PACKET_DELAY); delay(100); DaliTransmitCMD(INITIALISE, 0x00); delay(DALI_TWO_PACKET_DELAY); DaliTransmitCMD(INITIALISE, 0x00); delay(DALI_TWO_PACKET_DELAY); DaliTransmitCMD(INITIALISE, 0x00); delay(DALI_TWO_PACKET_DELAY); delay(100); DaliTransmitCMD(RANDOMISE, 0x00); delay(DALI_TWO_PACKET_DELAY); DaliTransmitCMD(RANDOMISE, 0x00); delay(DALI_TWO_PACKET_DELAY); delay(100); while(ShortAddr < 64) { long SearchAddr = 0xFFFFFF; bool Response = 0; long LowLimit = 0; long HighLimit = 0x1000000; Response = SearchAndCompare(SearchAddr); delay(DALI_TWO_PACKET_DELAY); if(Response) { digitalWrite(LED_PIN, LOW); Serial.println("Device detected, address searching..."); if(!SearchAndCompare(SearchAddr - 1)) { delay(DALI_TWO_PACKET_DELAY); SearchAndCompare(SearchAddr); delay(DALI_TWO_PACKET_DELAY); DaliTransmitCMD(PRG_SHORT_ADDR, ((ShortAddr << 1) | 1)); delay(3*DALI_TWO_PACKET_DELAY); DaliTransmitCMD(WITHDRAW, 0x00); Serial.print("24-bit address found: 0x"); Serial.println(SearchAddr, HEX); Serial.print("Assigning short address "); Serial.println(ShortAddr); break; } } else { Serial.println("No devices detected"); break; } while(1) { SearchAddr = (long)((LowLimit + HighLimit) / 2); Response = SearchAndCompare(SearchAddr); delay(DALI_TWO_PACKET_DELAY); if (Response) { digitalWrite(LED_PIN, LOW); if ((SearchAddr == 0) || (!SearchAndCompare(SearchAddr - 1))) break; HighLimit = SearchAddr; } else LowLimit = SearchAddr; } delay(DALI_TWO_PACKET_DELAY); SearchAndCompare(SearchAddr); delay(DALI_TWO_PACKET_DELAY); DaliTransmitCMD(PRG_SHORT_ADDR, ((ShortAddr << 1) | 1)); delay(5*DALI_TWO_PACKET_DELAY); DaliTransmitCMD(WITHDRAW, 0x00); delay(DALI_TWO_PACKET_DELAY); Serial.print("24-bit address found: 0x"); Serial.println(SearchAddr, HEX); Serial.print("Assigning short address "); Serial.println(ShortAddr); ShortAddr++; // break; // } delay(DALI_TWO_PACKET_DELAY); DaliTransmitCMD(TERMINATE, 0x00); delay(DALI_TWO_PACKET_DELAY); Serial.println("Init complete"); } //------------------------------------------------- bool SearchAndCompare(long SearchAddr) { bool Response = 0; uint8_t HighByte = SearchAddr >> 16; uint8_t MiddleByte = SearchAddr >> 8; uint8_t LowByte = SearchAddr; for(uint8_t i = 0; i < 3; i++) { DaliTransmitCMD(SEARCHADDRH, HighByte); delay(DALI_TWO_PACKET_DELAY); DaliTransmitCMD(SEARCHADDRM, MiddleByte); delay(DALI_TWO_PACKET_DELAY); DaliTransmitCMD(SEARCHADDRL, LowByte); delay(DALI_TWO_PACKET_DELAY); } DaliTransmitCMD(COMPARE, 0x00); delayMicroseconds(7 * DALI_HALF_BIT_TIME); for(uint8_t i = 0; i < DALI_RESPONSE_DELAY_COUNT; i++) { if (analogRead(DALI_RX_PIN) < DALI_ANALOG_LEVEL) { Response = 1; digitalWrite(LED_PIN, HIGH); break; } delayMicroseconds(DALI_HALF_BIT_TIME); } return Response; } //------------------------------------------------- void DaliTransmitCMD(uint8_t Part1, uint8_t Part2) { uint8_t DALI_CMD[] = { Part1, Part2 }; // digitalWrite(DALI_TX_PIN, LOW); delayMicroseconds(DALI_HALF_BIT_TIME); digitalWrite(DALI_TX_PIN, HIGH); delayMicroseconds(DALI_HALF_BIT_TIME); // for (uint8_t CmdPart = 0; CmdPart < 2; CmdPart++) { for(int i = 7; i >= 0; i--) { bool BitToSend = false; if ((DALI_CMD[CmdPart] >> i) & 1) BitToSend = true; if (BitToSend) digitalWrite(DALI_TX_PIN, LOW); else digitalWrite(DALI_TX_PIN, HIGH); delayMicroseconds(DALI_HALF_BIT_TIME); if (BitToSend) digitalWrite(DALI_TX_PIN, HIGH); else digitalWrite(DALI_TX_PIN, LOW); delayMicroseconds(DALI_HALF_BIT_TIME); } } digitalWrite(DALI_TX_PIN, HIGH); }
O descargarY esta es una prueba. Controlamos dos módulos conectados a DALI.
Vista #define DALI_TX_PIN 3 #define DALI_RX_PIN A0 #define BROADCAST_CMD 0b11111111 #define DOWN 0b00000010 #define UP 0b00000001 #define DALI_CHNL_COUNT 4 #define LAMP_OFF_VALUE 0 #define DALI_HALF_BIT_TIME 416 //microseconds #define DALI_TWO_PACKET_DELAY 10 //miliseconds // uint8_t AnalogPins[DALI_CHNL_COUNT] = {A1, A2, A3, A4, }; // uint8_t KeyPins[DALI_CHNL_COUNT] = {4, 5, 6, 7, }; uint8_t DALIPrevVals[DALI_CHNL_COUNT] = {0, 0, 0, 0}; uint8_t LampState[DALI_CHNL_COUNT] = {0, 0, 0, 0}; void setup() { pinMode(DALI_TX_PIN, OUTPUT); digitalWrite(DALI_TX_PIN, HIGH); for(uint8_t i = 0; i < DALI_CHNL_COUNT; i++) { pinMode(KeyPins[i], INPUT); digitalWrite(KeyPins[i], HIGH); } } void loop() { for(uint8_t PWM = 2; PWM < DALI_CHNL_COUNT; PWM++) { if (LampState[PWM] == 1) { uint16_t ADCValue = analogRead(AnalogPins[PWM]); if (ADCValue > 1016) ADCValue = 1016; ADCValue /= 4; uint8_t PWMVal = ADCValue; if (abs(DALIPrevVals[PWM] - PWMVal) >= 1) { DALIPrevVals[PWM] = PWMVal; DaliTransmitCMD(PWM << 1, PWMVal); if (LampState[PWM] == 0) LampState[PWM] = 1; delay(DALI_TWO_PACKET_DELAY); } } } for(uint8_t KEY = 0; KEY < DALI_CHNL_COUNT; KEY++) { if (digitalRead(KeyPins[KEY]) == LOW) { delay(70); if (KEY == 0) { DaliTransmitCMD(BROADCAST_CMD, UP); delay(DALI_TWO_PACKET_DELAY); break; } else if (KEY == 1) { DaliTransmitCMD(BROADCAST_CMD, DOWN); delay(DALI_TWO_PACKET_DELAY); break; } if (digitalRead(KeyPins[KEY]) == LOW) { if (LampState[KEY] == 0) { LampState[KEY] = 1; uint16_t ADCValue = analogRead(AnalogPins[KEY]); if (ADCValue > 1016) ADCValue = 1016; ADCValue /= 4; uint8_t PWMVal = ADCValue; DaliTransmitCMD(KEY << 1, PWMVal); } else { LampState[KEY] = 0; DaliTransmitCMD(KEY << 1, LAMP_OFF_VALUE); } delay(DALI_TWO_PACKET_DELAY); } delay(500); } } } //------------------------------------------------- void DaliTransmitCMD(uint8_t Part1, uint8_t Part2) { uint8_t DALI_CMD[] = { Part1, Part2 }; // digitalWrite(DALI_TX_PIN, LOW); delayMicroseconds(DALI_HALF_BIT_TIME); digitalWrite(DALI_TX_PIN, HIGH); delayMicroseconds(DALI_HALF_BIT_TIME); // for (uint8_t CmdPart = 0; CmdPart < 2; CmdPart++) { for(int i = 7; i >= 0; i--) { bool BitToSend = false; if ((DALI_CMD[CmdPart] >> i) & 1) BitToSend = true; if (BitToSend) digitalWrite(DALI_TX_PIN, LOW); else digitalWrite(DALI_TX_PIN, HIGH); delayMicroseconds(DALI_HALF_BIT_TIME); if (BitToSend) digitalWrite(DALI_TX_PIN, HIGH); else digitalWrite(DALI_TX_PIN, LOW); delayMicroseconds(DALI_HALF_BIT_TIME); } } digitalWrite(DALI_TX_PIN, HIGH); }
O descargarSe ha hecho mucho trabajo y, por lo tanto, quiero compartirlo con todos. Tal vez esto facilitará el desarrollo para alguien.
No se encontraron bibliotecas completas en la red. Por favor, use, todo realmente funciona. Haga preguntas, trataré de responder todo con mis colegas. Tal vez no de inmediato, realmente nos vamos de vacaciones por dos semanas.
En el video informe sobre el trabajo realizado.
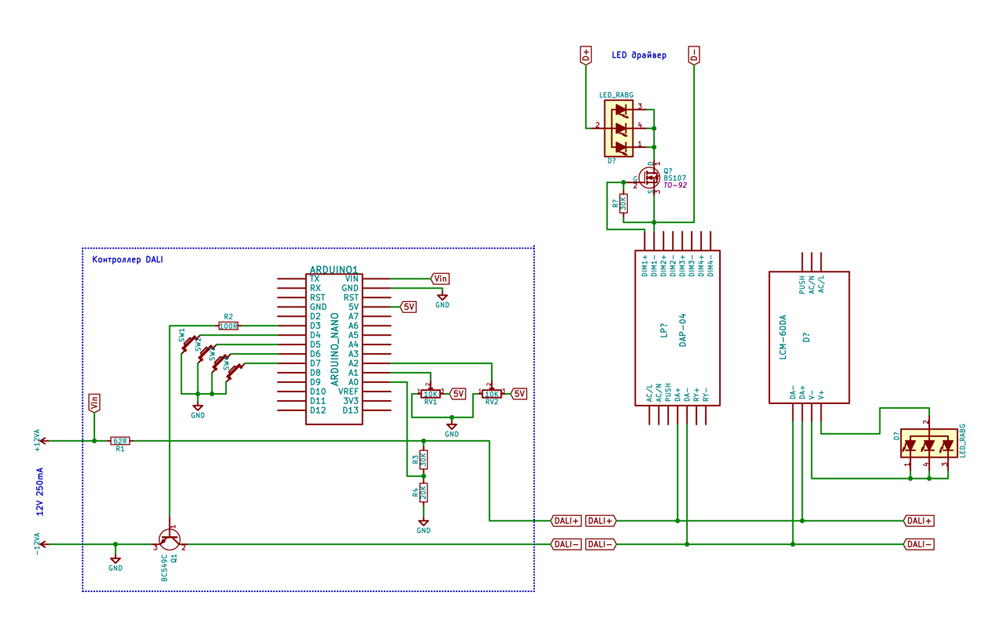
Módulos DAP-04 y LCM-60DA probados de Mean Well. Pero funcionará con cualquier otro.
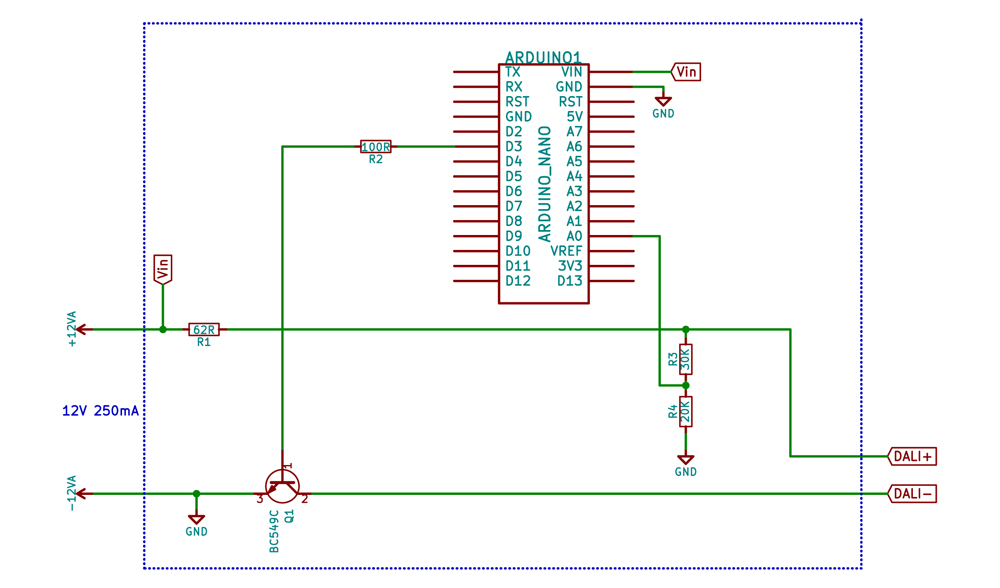
Y este es el esquema del kit de cuerpo Arduino, que lo transfiere al modo maestro DALI y a la fuente de alimentación al mismo tiempo.
Esta es la conexión de los botones para el boceto de prueba.

Y aquí hay una pequeña red DALI