Creado en los años 60, Shakey fue el primer robot móvil con la capacidad de analizar sus acciones. Los ambiciosos objetivos del proyecto no se alcanzaron por completo, pero tuvieron una gran influencia en el desarrollo posterior de la robótica.
Los autores del proyecto Shakey describieron cómo se organizó el control del robot en un gran artículo de AI Magazine. En esta publicación, la traducción del fragmento más interesante e importante del texto. Su autor, Peter Hart, fue miembro del equipo de desarrollo. Creando Shakey
El proyecto Shakey se lanzó en enero de 1965 por iniciativa del Centro de Inteligencia Artificial del Instituto de Investigación de Stanford (SRI International). El Instituto propuso el desarrollo de una "máquina inteligente" para aplicaciones de inteligencia. Pero el grupo de trabajo tenía una motivación diferente. Querían crear un sitio de prueba para conectar todas las áreas de inteligencia artificial (representación sistémica, razonamiento, planificación, aprendizaje automático, visión por computadora y comprensión del habla natural).
Al desarrollar Shakey, los ingenieros se guiaron por dos reglas:
- la mecánica debe ser lo más simple posible; por lo tanto, no se instaló un solo brazo manipulador en el robot;
- para no trabajar más tarde en la reducción del diseño, el estante electrónico se instaló en la parte superior.
Dado que las capacidades mecánicas y sensoriales de Shakey eran limitadas, el equipo del proyecto creó un entorno experimental robusto y simple para el robot: media docena de habitaciones con grandes bloques geométricos en su interior. Los bloques fueron pintados para ser reconocidos por una cámara de baja resolución.
La primera computadora para Shakey fue la SDS 940 con menos memoria que la caché L2 de las computadoras portátiles modernas. En 1970, fue reemplazado por el más potente DEC PDP-10. Shakey habló con el PDP-10 a través de un procesador de comunicaciones. Este sistema fue uno de esos nodos que contribuyeron al nacimiento de ARPANET. Casi al mismo tiempo, comenzó una reescritura completa del software Shakey. El hierro solo necesitaba mejoras mínimas.
Elementos clave de diseño de ShakeySoftware Shakey
La segunda versión del producto se basa en dos ideas fundamentales. El primero es representar el mundo de Shakey a través
del cálculo de
predicados de primer orden , complementando la forma con un modelo de cuadrícula, un componente clave de la primera versión.
La segunda idea era estructurar el software Shakey en varias capas. Este enfoque para controlar el robot se utilizó por primera vez. A continuación, describimos brevemente cada nivel, comenzando con los comandos de nivel inferior.
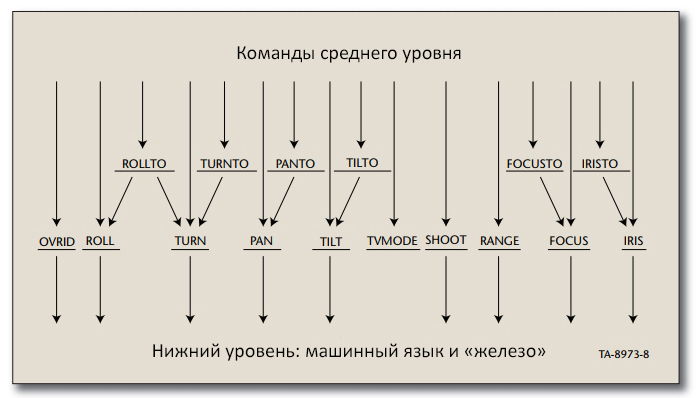
Equipos de nivel inferiorLos comandos de nivel inferior, como ROLL y PAN, se enviaron directamente al componente de hardware Shakey. En este nivel también se ubican equipos como PANTO, que se encargó de girar la "cabeza" del dispositivo en la dirección seleccionada.
 Equipos de nivel medio: cadenas de Markov
Equipos de nivel medio: cadenas de MarkovEn este nivel hay equipos como GOTHRUDOOR ("atravesar la puerta"). Fueron asignados a un nivel separado, ya que todos estaban representados como
cadenas de Markov .
Cadena Markov para el equipo GOTHRUDOORLas cadenas de Markov se pueden "leer" escaneando primero la columna izquierda hasta que se alcanza la primera condición verdadera que realiza la acción correspondiente, y luego regresando al comienzo de la tabla. En consecuencia, las cadenas de Markov se caracterizan por la estabilidad (este algoritmo de acciones está ligeramente simplificado, pero la práctica de "volver al principio" es fundamental y, como veremos, una característica importante de estas cadenas).
Si los equipos de nivel medio fueran los últimos que Shakey podría ejecutar, el robot estaría muy limitado en sus acciones. Solo podía lograr objetivos que requieren solo una acción preprogramada. Para hacer más, Shakey tenía que poder trazar una secuencia de acciones (como un plan). El planificador automático STRIPS (Stanford Research Institute Problem Solver) fue el responsable de esto. Él era el siguiente nivel más alto de software.
STRIPS, Stanford Research Institute Problem SolverEl planificador automático STRIPS surgió debido a la combinación de dos grandes conceptos. El primero fue una estrategia de planificación llamada análisis de objetivos y medios. Se presenta en el sistema "Solucionador de problemas generales" de Herbert Simon y Allen Newell.
El segundo concepto fue la prueba del teorema en el cálculo de predicados y su aplicación en sistemas de preguntas y respuestas. Esto se discute en el trabajo de Cordell Green. Richard Fykes y Niels Nielson combinaron este conocimiento para crear STRIPS en 1971, que utilizó el análisis de objetivos y medios para calcular predicados.
PLANEX, Ejecutivo de Ejecución del PlanPoco después de crear STRIPS, el equipo del instituto encontró una manera de generalizar el plan STRIPS reemplazando las constantes en el sistema con variables. También inventaron una estructura de datos llamada tabla de triángulos, que demuestra las interdependencias internas de un plan genérico. Estos diseños formaron la base del sistema PLANEX, el último nivel de software Shakey (Fykes, Hart y Nielson, 1972).
Usando este software, PLANEX puede monitorear la implementación real del plan. El sistema puede notar si algo salió mal y reprogramar el trabajo desde ese momento, reutilizando partes del plan existente siempre que sea posible. Incluso puede ser una decisión "emprendedora": si Shakey está repentinamente más cerca de completar su tarea, puede aprovecharla.
Esta capacidad de detectar y recuperar errores fue una pieza crítica del software Shakey. Hay una gran diferencia entre crear un plan de acción para un robot real que funciona en el mundo real, donde algo podría salir mal, y un programador "abstracto" que simplemente imprime un plan simbólico. Las cadenas PLANEX y Markov se convirtieron en la solución para lograr una planificación confiable del mundo real.
Jerarquía de nivel de software ShakeyVisión por computadora
El plan inicial del proyecto no requería una investigación intensiva en el campo de la visión por computadora. Más bien, el plan era integrar las técnicas existentes de visión por computadora en una plataforma experimental. Pero, como resultó, en ese momento había muy pocas tecnologías disponibles, por lo que los especialistas tuvieron que trabajar duro en el campo de la investigación de visión por computadora.
Uno de los resultados importantes de este trabajo fue la invención de lo que se puede llamar la forma moderna de la transformación de Hough, un método utilizado para extraer elementos de una imagen (R. Duda, P. Hart, 1972). Esto se logró combinando dos conceptos que a primera vista parecen no tener ninguna relación.
La primera idea está contenida en la patente de Paul Hough. Describe la transformación de puntos en el plano de la imagen a líneas rectas en el espacio de transformación. Las líneas de intersección en este último corresponden a puntos colineales en la forma. Pero surge el problema de las pendientes sin fin, lo que hace que esta transformación sea computacionalmente engorrosa.
La segunda idea proviene de la llamada geometría integral. Los matemáticos tenían razones teóricas para usar la parametrización del radio angular de la línea en lugar de la intercepción de pendiente más familiar utilizada por Hough. Peter Hart señaló que cuando se reemplaza la transformación lineal de Hough por una sinusoidal, no solo se resuelve el problema de las pendientes infinitas, sino que la nueva transformación es invariable a la elección de coordenadas. Además, Peter Hart y Richard Duda han extendido este método para detectar curvas analíticas en imágenes, y esta transformación se ha utilizado desde entonces.
Navegación y algoritmo A *
Shakey tuvo que concentrarse en el terreno, por lo que se desarrollaron varios algoritmos de ruta más corta. Uno de ellos, llamado A *, fue creado por Peter Hart, Niels Nielson y Bertram Raphael. El nuevo algoritmo tenía propiedades muy útiles: en primer lugar, siempre encontraba la ruta más corta y, en segundo lugar, mientras seleccionaba el número mínimo de posibilidades alternativas. Podemos decir que siempre funciona y es computacionalmente eficiente.
Se podría pensar que un resultado tan significativo agradecería cualquier publicación con placer, pero resultó al revés. La presentación del algoritmo A * fue rechazada por todas las prestigiosas revistas científicas de la época.
Al revisar estas viejas revisiones, podría pensar que los editores dieron un informe a los matemáticos para que lo leyeran debido a todos estos teoremas aterradores. Sin embargo, los matemáticos no quedaron impresionados, ya que solo se presentaron gráficos con un número finito de nodos a partir de las pruebas. En ese momento, a los autores les parecía que los matemáticos no veían la diferencia entre un gráfico con diez nodos y un gráfico con diez billones de nodos. Pero para los científicos que trabajan en el campo de la informática, esta diferencia es significativa.
Al final, el informe fue aceptado en el Instituto de Ingenieros Eléctricos y Electrónicos (IEEE Transactions on Systems Science and Cybernetics) y continúa siendo referenciado por más de 45 años.
Mundo en ese momento
Lo anterior da una idea de la parte (¡aunque lejos del volumen completo!) Del trabajo realizado por el equipo del proyecto Shakey. Para tener una idea de este trabajo en un contexto social más amplio, veamos el clima intelectual y cultural de la época.
En 1970, se publicó un gran artículo sobre el proyecto Shakey en la popular revista Life. El autor, el periodista Brad Darrach, parece haber ido demasiado lejos con el titular: "La fascinante y terrible realidad de una máquina con su propia mente". Sin embargo, aunque algunos creían que los robots podían esclavizar al mundo, otros eran bastante escépticos ante tales artículos. Hubert Dreyfus fue uno de los que, desde un punto de vista filosófico, argumentó que el concepto de IA es básicamente poco realista. Y en algún lugar entre Darrach y Dreyfus, había quienes temían que algún día los robots pudieran asumir trabajos humanos.
Publicación de la revista Shakey's LifeInvitados Shakey
Los desarrolladores del robot dieron la bienvenida a todos los visitantes interesados en su trabajo. Una revisión de las reacciones obtenidas también dice mucho sobre el estado del mundo en ese momento. Aquí hay algunos ejemplos:
- Un grupo de escolares visitó el laboratorio. El profesor que los acompañó preguntó qué tenían los ingenieros "trabajo real": "Este robot es tu hobby, ¿verdad?"
- El general preguntó si se podía montar un cuchillo de 36 pulgadas en el robot.
- Arthur Clarke visitó el laboratorio inmediatamente después del lanzamiento de la película "Space Odyssey of 2001", pero estaba más interesado en hablar sobre la revisión de la película del New York Times que en las discusiones sobre el futuro de los robots.
- Un estudiante de secundaria condujo desde Seattle hasta Menlo Park en California para ver a Shakey. Décadas después, Bill Gates recordó que lo que vio fue impresionante.
- Un auditor del gobierno de los Estados Unidos preguntó si el SRI realmente se encargó de entregar miles de millones de "bits de paquetes". Otros siguieron esta pregunta, incluso si se notó corrosión en alguno de estos bits.
Finalización del proyecto Shakey
El proyecto Shakey se cerró en 1972, no por falta de ideas, sino por falta de fondos. ¿Qué se ha logrado durante su existencia?
Hubo tantas opiniones sobre este puntaje como miembros del equipo, pero se pueden hacer varias generalizaciones:
- Muchos de los resultados privados del proyecto (STRIPS, PLANEX, algoritmo A * y una nueva forma de transformación Hough) se han convertido en una contribución técnica significativa.
- En general, Shakey fue un logro significativo. Fue el primer robot inteligente móvil y el primer sistema en combinar software con IA con hardware físico.
- Las capacidades generales de Shakey, en términos de mecánica y software, no han alcanzado el nivel de las aspiraciones iniciales. Esto no es sorprendente, dado el alto nivel inicial de reclamos. Tomó décadas lograr algunos de los objetivos establecidos, mientras que otros aún permanecen sin resolver.
Referencias
1. "Shakey: de la concepción a la historia". Artículo original La segunda parte del material habla sobre la aplicación adicional de los descubrimientos del proyecto Shakey. Ir a
2. "¿Cuánto se necesita para rehacer Shakey the Robot?" - Un intento de reproducir Shakey en condiciones modernas. Ir aPara más información sobre robótica, visite robo-hunter.com:Ciencia popular: